TECSをサポートする構造設計ツール ZIPC Toy!
|
|
|
- やすもり おおはし
- 7 years ago
- Views:
Transcription
1 ET2009 TOPPERS セッション C-9 TECS をサポートするコンポーネント設計ツール ZIPC Toy! と活用法 キャッツ株式会社ソフトウェア事業部今井良和 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 1
2 目次 TECSについて コンポーネント記述言語 CDL ツールチェーン ZIPC Toy! : コンポーネント設計 ZIPC : コンポーネントの振る舞い設計 実演 : LEGO Mindstorms NXT 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 2
3 TECS について : 概要 TECS : Toppers Embedded Component System 組込み向けにインタフェースを具体化したコンポーネントシステム 目的 ソフトウェアをコンポーネント構造にすることで見通しを向上 コンポーネント記述を標準化して部品の再利用, 部品流通を促進 特徴 コンポーネントの静的な生成と結合 ソフトウェアの構造をコンポーネント記述言語 (CDL) で表現 C 言語の曖昧さを排除したインタフェース定義 データ構造定義 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 3
 { uint8_t level = SonarSensor_get(); uint8_t output = 0; if (level > 100) { Driver_set(10, 0); // 前進 else { Driver_set(10, 10); // 右回転")
 { nxt_motor_set_speed( PORT_MTR, speed+turn, 0); nxt_motor_set_speed( PORT_MTL, speed(-turn,0); 製品 A")
 障害物があれば右回転なければ前進 製品 D ソナーセンサー ( 障害物検知 ) 光センサー ( ライン検知 ) モーター 2 個 ( 右 左回転 ) 障害物があれば後退ライン上なら左回転ライン上でなければ右回転 Controller.")
4 TECS について : ソースベースの部品化の課題 従来 : ソースの部品化 Controller.c Task(Driver) { uint8_t level = SonarSensor_get(); uint8_t output = 0; if (level > 100) { Driver_set(10, 0); // 前進 else { Driver_set(10, 10); // 右回転 TerminateTask(); SonarSensor.c uint8_t SonarSensor_get(void) { return sensor_abc(port_ls); Driver.c void Driver_set(uint8_t speed, uint8_t turn) { nxt_motor_set_speed( PORT_MTR, speed+turn, 0); nxt_motor_set_speed( PORT_MTL, speed(-turn,0); 製品 A ソナーセンサー ( 障害物検知 ) モーター 2 個 ( 右 / 左車輪 ) 障害物があれば右回転なければ前進 他の製品にソースを活かしたいが 製品 B 光センサー ( 障害物検知 ) モーター 2 個 ( 右 / 左車輪 ) 障害物があれば右回転なければ前進 製品 C ソナーセンサー ( 障害物検知 ) モーター 2 個 ( 後輪, ステアリング ) 障害物があれば右回転なければ前進 製品 D ソナーセンサー ( 障害物検知 ) 光センサー ( ライン検知 ) モーター 2 個 ( 右 左回転 ) 障害物があれば後退ライン上なら左回転ライン上でなければ右回転 Controller.c を変更 LightSensor.c を追加 Driver.c を変更 Controller.c を変更 LightSensor.c を追加 Driver.c を変更 再利用できないソースコードが多い 写真 : /11/9 CATS co., ltd., TOPPERS プロジェクト 4
5 TECS について : コンポーネントシステムの利点 TECS にすると 製品 A 製品 D tinwheeldriver tcontroller Controller cdriver edriver sdrive cdetector edetector sdetect tinwheeldriver Driver tsonardetector Detector tlinetracer Controller cdriver sdrive cobstdetector sdetect edriver edetector Driver tsonardetector Detector 製品 B tinwheeldriver clinedetector sdetect edetector tlightdetector Detector tcontroller Controller cdriver edriver sdrive cdetector edetector Driver tlightdetector 部品 \ 製品製品 A 製品 B 製品 C 製品 D sdetect Detector tcontroller 製品 C tcontroller Controller cdriver EDriver SDrive tsteerdriver Driver tlinetracer tinwheeldriver tsteerdriver cdetector edetector tsonardetector tsonardetector sdetect Detector tlightdetector 再利用性が向上 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 5
6 設計TECS について : 開発の流れと開発者の役割 実装CDL 1 アーキテクチャ設計者 どのような部品が必要とされるか どのように振る舞うべきか どのようなインターフェースかを設計する 2 コンポーネント開発者 コンポーネントの振る舞いを実装 3 アプリケーション開発者 コンポーネントを配置 インタフェースを接続 パラメータを入力 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 6
7 コンポーネント記述言語 CDL: 構成要素 TECS CDL は主に 3 つの記述から構成 シグニチャ記述 コンポーネントのインターフェース関数を定義する セルタイプ記述 コンポーネントが持つ受け口 呼び口を定義する 組み上げ記述 コンポーネント間の呼び出し関係を定義してシステムを組み上げる CDL によって コンポーネントのインタフェースを明確に定義ソースコードは組み上げ ( 他のコンポーネント ) に依存しない コンポーネントの再利用性が向上ソースをソフト部品として流通できる import_c( "tecs.h" ); typedef int32_t ER; シグニチャの定義 signature ssimple { ER func1( [in]int32_t inval ); ER func2( [out,string]char_t *str ); celltype tserver { entry ssimple eent; celltype tclient { call ssimple ccall; cell tserver Server { cell tclient Client { ccall = Server.eEnt; セルタイプの定義 組み上げ記述 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 7
8 コンポーネント記述言語 CDL: 定義 TECS で使用するコンポーネント記述言語 (TECS Component Description Language) TECS CDL の用語セルセルタイプシグニチャ呼び口, 受け口セル属性セル変数 コンポーネント図 セルタイプ 名 受け口 名 呼び口 名 tclient Client セル 名 ccall eent ssimple シグネチャ 名 func1() func2() 言語で表現 TECS CDL tserver Server 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 8
9 コンポーネント記述言語 CDL: 図との対応 CDL import_c( "tecs.h" ); コンポーネント図 セルタイプ 名 受け口 名 呼び口 名 tclient ccall eent Client ssimple シグネチャ 名 セル 名 func1() func2() tserver Server typedef int32_t ER; シグネチャの定義 signature ssimple { ER func1( [in]int32_t inval ); ER func2( [out,string]char_t *str ); celltype tserver { entry ssimple eent; attr { const uint16_t port val { int8_t clients; celltype tclient { call ssimple ccall; attr { const uint16_t port cell tserver Server { port = 1000; cell tclient Client { ccall = Server.eEnt; port = 21000; セルタイプの定義 セル属性セル変数 組み上げ記述 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 9

 2009/11/9 CATS co., ltd.")
10 ツールチェーン アーキテクチャ設計 ( コンポーネント設計 ) 組み上げ記述 CDL ZIPC Toy! Technology of youth 振る舞い設計実装 ( 自動コード生成 ) 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 10

 コンパイル ビルド環境を作成")
11 ZIPC Toy! : コンポーネント設計 構造設計 / コンポーネント設計 GUI で TECS コンポーネントモデルを作成プロパティ入力 実装コードの開発環境を作成 CDL からソースコードのひな形を作成 (TECSGEN) コンパイル ビルド環境を作成 (Eclipse CDT) 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 11



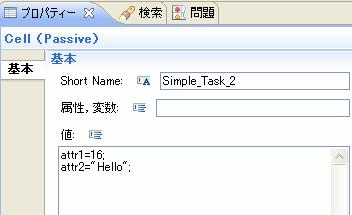
12 ZIPC Toy! : コンポーネント設計 TECS gen で C 言語の開発環境を作成 コンポーネント図を作成 モデル全体を把握 セル, シグネチャのパラメータを入力 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 12
13 ZIPC : 振る舞い設計 ZIPC : 状態遷移表をベースとした組み込み向け CASE ツール 状態遷移表によるモレヌケのない設計 シミュレーション機能 C ソースコードの自動生成 状態 事象 ( イベント ) アクション 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 13
14 ZIPC Toy! + ZIPC TECS コンポーネント図 tgyrosensor egyro cgyro tdriver cmotorl emotor tmotor GyroSensor cgyrocb egyrocb Driver emotorlcb cmotorcb MotorL tcontroller cdriver edriver cmotorr emotor tmotor Controller emotorrcb cmotorcb MotorR 振る舞い ( シーケンス図 ) edriver cgyro Driver cmotorl cmotorr cgyro_init() egyrocb_init_fin() cmotorl_init() emotorrcb_init_fin() cmotorr_init() emotorrcb_init_fin() edriver_drive(speed, turn) cgyro_get() cmotorl_set_speed(speed_l) cmotorl_set_speed(speed_r) 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 14
15 ZIPC Toy! + ZIPC : (1) STM スケルトン作成 cgyro cgyrocb tdriver cmotorl emotorlcb edriver cmotorr emotorrcb signature sgyrosensor { void init(void); signature sgyrosensorcb { void init_fin([in]int_32_t offset); signature smotor { void init(void); int32_t get_position(); void set_speed(int8_t pwm); Signature smotorcb { void init_fin(void); signature sdriver { void drive([in]float32_t speed, [in]float32_t turn); [singleton,active]celltype tdriver { call sgyrosensor cgyro; entry sgyrosensorcb egyrocb; call smotor cmotorl; entry smotorcb emotorlcb; call smotor cmotorr; entry smotorcb emotorrcb; entry sdriver edriver; var { float32_t speed; float32_t turn; int32_t gyro_offset; int8_t state; 受け口の関数 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 15
16 ZIPC Toy! + ZIPC : (2) アクションの記述 cgyro_init() cgyro_get() 呼び口の関数 cmotorl_init() cmotorl_get_position() cmotorl_set_speed(int8_t pwm) cmotorr_init() cmotorr_get_position(); cmotorr_set_speed(int8_t pwm) VAR_speed VAR_turn VAR_gyro_offset VAR_state セル変数 コンポーネントのインタフェースに沿った実装が簡単に状態遷移表によるヌケモレのない設計 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 16
17 ZIPC Toy! + ZIPC : セルタイプコードの生成 tdriver.c void TaskMain( void ) { switch( ZComTsk_m1State[ZComTsk_M1] ) { case ZComTsk_M1S0: ZComTsk_m1e0s0(); break; case ZComTsk_M1S4: ZComTsk_m1e0s4(); break; default: break; STM 設計書 ジェネレータ void egyro_init_fin( uint32_t offset ) { switch( ZComTsk_m1State[ZComTsk_M1] ) { case ZComTsk_M1S1: ZComTsk_m1e1s1( offset ); break; default: break; static void ZComTsk_m1e0s4( void ) { int8_t pwm_l, pwm_r; calc(var_speed, VAR_turn, cgyro_get(), VAR_gyro_offset, cmotorl_get_position(), cmotorr_get_position(), cbattery_get(), &pwm_l, &pwm_r); cmotorl_set_speed(pwm_l); cmotorr_set_speed(pwm_r); /11/9 CATS co., ltd., TOPPERS プロジェクト 17
18 例 : LEGO Mindstorms NXT 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 18
19 ZIPC Toy! : 今後の拡張 CDL のインポート ZIPC Toy! Technology of youth 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 19
20 ZIPC Toy! : 今後の拡張 既存の C コードのコンポーネント化 #include ecrobot.h #include nxtlogo.h const int8_t MOTOR_L_PORT = PORT_B; const int8_t MOTOR_R_PORT = PORT_C; const int8_t GYRO_PORT = PORT_S1; float32_t forward; float32_t turn; int32_t gyro_offset; void drive(float32_t forward, float32_t turn) { int8_t pwm_l, pwm_r; balance_control( forward, turn, nxt_gyro_get(gyro_port), gyro_offset, nxt_motor_get_position(motor_l_port), nxt_motor_get_position(motor_r_port), ecrobot_get_battery_voltage(), &pwm_l, &pwm_r ); 自動抽出 関数定義 void drive(float32_t forward, float32_t turn); void init(); 関数参照 void balance_control(float32_t, float32_t, ); int32_t nxt_gyro_get(int8_t), int32_t nxt_motor_get_position(int8_t); int32_t ecrobot_get_battery_voltage(void); void nxt_motor_set_speed(int8_t, int8_t*, int8_t) void balance_init(void); void nxt_motor_set_position(int8_t,int32_t); ユーザが選択 シグネチャ受け口呼び口 nxt_motor_set_speed(motor_l_port, pwm_l, 0); nxt_motor_set_speed(motor_r_port, pwm_r, 0); void init(void) { balance_init(); nxt_motor_set_position(motor_l_port, 0); nxt_motor_set_position(motor_r_port, 0); gyro_offset=0; 定数定義 float32_t forward; float32_t turn; int32_t gyro_offset; 変数定義 const int8_t MOTOR_L_PORT; const int8_t MOTOR_R_PORT; const int8_t GYRO_PORT; 属性変数 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 20

21 ZIPC Toy! : 今後の拡張 デバッグ ブレークポイントの設定 変数の参照 実行トレース GDB 2009/11/9 CATS co., ltd., TOPPERS プロジェクト 21
目次 2 1. 目的 捉える課題 2. コンポーネントシステムについて TECS (TOPPERS Embedded Component System) 他言語との比較 3. コンポーネントシステムの適用 TOPPERS/SSPカーネルへの適用開発工程における有効性ソフトウェア構造の俯瞰における有効
 他言語との比較 3. コンポーネントシステムの適用 TOPPERS/SSPカーネルへの適用開発工程における有効性ソフトウェア構造の俯瞰における有効") 9 th Workshop on Critical Software System ( 2011) TOPPERS/SSP への組込みコンポーネントシステム適用における設計情報の可視化と抽象化 2011.11.17 株式会社ヴィッツ組込制御開発部 TOPPERS TECS-WG 鵜飼敬幸 目次 2 1. 目的 捉える課題 2. コンポーネントシステムについて TECS (TOPPERS Embedded
9 th Workshop on Critical Software System ( 2011) TOPPERS/SSP への組込みコンポーネントシステム適用における設計情報の可視化と抽象化 2011.11.17 株式会社ヴィッツ組込制御開発部 TOPPERS TECS-WG 鵜飼敬幸 目次 2 1. 目的 捉える課題 2. コンポーネントシステムについて TECS (TOPPERS Embedded
PowerPoint Presentation
 TECS 対応版 TOPPERS/ASP カーネルについて 名古屋 学 安積卓也 2009/11/19 TOPPERS プロジェクト 1 次 TECS 簡易パッケージ構造 コンポーネント記述 ASP+TECS コンポーネント版のsample1.c(ASP) の実 例 カーネルオブジェクト ログタスク & シリアルドライバの例 2009/11/19 TOPPERS プロジェクト 2 TECS 簡易パッケージ構造
TECS 対応版 TOPPERS/ASP カーネルについて 名古屋 学 安積卓也 2009/11/19 TOPPERS プロジェクト 1 次 TECS 簡易パッケージ構造 コンポーネント記述 ASP+TECS コンポーネント版のsample1.c(ASP) の実 例 カーネルオブジェクト ログタスク & シリアルドライバの例 2009/11/19 TOPPERS プロジェクト 2 TECS 簡易パッケージ構造
SWEST 17 mruby の現状と事例紹介 九州工業大学情報工学部田中和明 RubyAssociation 軽量 Ruby フォーラム
 SWEST 17 mruby の現状と事例紹介 九州工業大学情報工学部田中和明 RubyAssociation 軽量 Ruby フォーラム 自己紹介 田中和明 ( たなかかずあき ) 九州工業大学情報工学部機械情報工学科 出身は情報工学で, 力学は不得意機械らしいことを研究テーマに... 組込みシステム ( ハード + ソフト ) の研究 Ruby と mruby Ruby オブジェクト志向プログラム言語
SWEST 17 mruby の現状と事例紹介 九州工業大学情報工学部田中和明 RubyAssociation 軽量 Ruby フォーラム 自己紹介 田中和明 ( たなかかずあき ) 九州工業大学情報工学部機械情報工学科 出身は情報工学で, 力学は不得意機械らしいことを研究テーマに... 組込みシステム ( ハード + ソフト ) の研究 Ruby と mruby Ruby オブジェクト志向プログラム言語
第 2 章インタフェース定義言語 (IDL) IDL とは 言語や OS に依存しないインタフェース定義を行うためのインタフェース定義言語です CORBA アプリケーションを作成する場合は インタフェースを定義した IDL ファイルを作成する必要があります ここでは IDL の文法や IDL ファイ
 IDL とは 言語や OS に依存しないインタフェース定義を行うためのインタフェース定義言語です CORBA アプリケーションを作成する場合は インタフェースを定義した IDL ファイルを作成する必要があります ここでは IDL の文法や IDL ファイ") 第 2 章インタフェース定義言語 (IDL) IDL とは 言語や OS に依存しないインタフェース定義を行うためのインタフェース定義言語です CORBA アプリケーションを作成する場合は インタフェースを定義した IDL ファイルを作成する必要があります ここでは IDL の文法や IDL ファイルの作成方法 コンパイル方法について説明します IDL ファイルの作成にあたっては INTERSTAGE
第 2 章インタフェース定義言語 (IDL) IDL とは 言語や OS に依存しないインタフェース定義を行うためのインタフェース定義言語です CORBA アプリケーションを作成する場合は インタフェースを定義した IDL ファイルを作成する必要があります ここでは IDL の文法や IDL ファイルの作成方法 コンパイル方法について説明します IDL ファイルの作成にあたっては INTERSTAGE
f2-system-requirement-system-composer-mw
 Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
1. プログラム実行時の動作プログラムを実行すると以下のように動作します 1) NUCLEO-F401RE 上の LED LD2( 緑 ) が 200mSec 間隔で点滅します 2. プロジェクトの構成 2.1. プロジェクト F401N_BlinkLD2 の起動画面 TrueSTUDIO で作成し
 NUCLEO-F401RE 上の LED LD2( 緑 ) が 200mSec 間隔で点滅します 2. プロジェクトの構成 2.1. プロジェクト F401N_BlinkLD2 の起動画面 TrueSTUDIO で作成し") TrueSTUDIO 用 F401N_BlinkLD2 の説明 V003 2014/10/01 TIM11 の割り込みを使用して LED 点滅を行う NUCLEO-F401RE のプロジェクトサンプルです NUCLEO-F401RE は STMicroelectronics 社製の Cortex-M4 ARM CPU である STM32F401RET6 を搭載した基板です 試用版の開発ツール Atollic
TrueSTUDIO 用 F401N_BlinkLD2 の説明 V003 2014/10/01 TIM11 の割り込みを使用して LED 点滅を行う NUCLEO-F401RE のプロジェクトサンプルです NUCLEO-F401RE は STMicroelectronics 社製の Cortex-M4 ARM CPU である STM32F401RET6 を搭載した基板です 試用版の開発ツール Atollic
組込みシステムにおける UMLモデルカタログの実践研究
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
PowerPoint プレゼンテーション
 5 月 Java 基礎 1 タイトル Java 基礎 2 日間 概要 目的 サーバサイドのプログラミング言語で最もシェアの高い Java SE の基本を習得します 当研修ではひとつの技術ごとに実用的なアプリケーションを作成するため 効果的な学習ができます Java SE の多くの API の中で 仕事でよく利用するものを中心に効率よく学びます 実際の業務で最も利用される開発環境である Eclipse
5 月 Java 基礎 1 タイトル Java 基礎 2 日間 概要 目的 サーバサイドのプログラミング言語で最もシェアの高い Java SE の基本を習得します 当研修ではひとつの技術ごとに実用的なアプリケーションを作成するため 効果的な学習ができます Java SE の多くの API の中で 仕事でよく利用するものを中心に効率よく学びます 実際の業務で最も利用される開発環境である Eclipse
1. USB の VCP( 仮想 COM ポート ) について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )
 について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )") TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
PowerPoint Presentation
 ソフトウェア演習 B GUI を持つ Java プログラムの 設計と実装 4.1 例題 :GUI を持った電卓を作ろう プロジェクトCalculator パッケージ名 :example ソースファイル : Calculator.java GUI.java EventProcessor.java 2 4.2 GUI とイベント処理 GUI の構成 :Swing GUI の場合 フレーム JFrame:
ソフトウェア演習 B GUI を持つ Java プログラムの 設計と実装 4.1 例題 :GUI を持った電卓を作ろう プロジェクトCalculator パッケージ名 :example ソースファイル : Calculator.java GUI.java EventProcessor.java 2 4.2 GUI とイベント処理 GUI の構成 :Swing GUI の場合 フレーム JFrame:
Microsoft PowerPoint - CproNt02.ppt [互換モード]
![Microsoft PowerPoint - CproNt02.ppt [互換モード]](/thumbs/95/124866096.jpg "Microsoft PowerPoint - CproNt02.ppt [互換モード]") 第 2 章 C プログラムの書き方 CPro:02-01 概要 C プログラムの構成要素は関数 ( プログラム = 関数の集まり ) 関数は, ヘッダと本体からなる 使用する関数は, プログラムの先頭 ( 厳密には, 使用場所より前 ) で型宣言 ( プロトタイプ宣言 ) する 関数は仮引数を用いることができる ( なくてもよい ) 関数には戻り値がある ( なくてもよい void 型 ) コメント
第 2 章 C プログラムの書き方 CPro:02-01 概要 C プログラムの構成要素は関数 ( プログラム = 関数の集まり ) 関数は, ヘッダと本体からなる 使用する関数は, プログラムの先頭 ( 厳密には, 使用場所より前 ) で型宣言 ( プロトタイプ宣言 ) する 関数は仮引数を用いることができる ( なくてもよい ) 関数には戻り値がある ( なくてもよい void 型 ) コメント
AUTOSAR OS仕様とTOPPERS/ATK2の使い方
 モデルカーを用いたAUTOSAR 開発入門 AUTOSAR SW-C 対応プログラム開発 : 1ECU 版設計 名古屋大学大学院情報科学研究科附属組込みシステム研究センター人材育成プログラム (NEP) PLE 最終更新日 : 2016/01/07 1 AUTOSAR SW-C 対応 プログラム開発 : 1ECU 版設計 概要 (1) システム /SW-C 設計 (2)SW-C 実装 (3)ECUコンフィギュレーション
モデルカーを用いたAUTOSAR 開発入門 AUTOSAR SW-C 対応プログラム開発 : 1ECU 版設計 名古屋大学大学院情報科学研究科附属組込みシステム研究センター人材育成プログラム (NEP) PLE 最終更新日 : 2016/01/07 1 AUTOSAR SW-C 対応 プログラム開発 : 1ECU 版設計 概要 (1) システム /SW-C 設計 (2)SW-C 実装 (3)ECUコンフィギュレーション
RL78開発環境移行ガイド R8C/M16C, H8S/H8SXからRL78への移行(統合開発環境編)(High-performance Embedded Workshop→CS+)
(High-performance Embedded Workshop→CS+)") RL78 開発環境移行ガイド R8C/M16C, H8S/H8SXからRL78への移行 ( 統合開発環境編 ) (High-performance Embedded Workshop CS+) 2017/4/7 R20UT2087JJ0103 ソフトウェア事業部ソフトウエア技術部ルネサスシステムデザイン株式会社 はじめに 本資料は 統合開発環境 High-performance Embedded Workshop
RL78 開発環境移行ガイド R8C/M16C, H8S/H8SXからRL78への移行 ( 統合開発環境編 ) (High-performance Embedded Workshop CS+) 2017/4/7 R20UT2087JJ0103 ソフトウェア事業部ソフトウエア技術部ルネサスシステムデザイン株式会社 はじめに 本資料は 統合開発環境 High-performance Embedded Workshop
RCX vs. NXT 機能 CPU メモリサイズ ( バイト ) 1 デバイス I/O 表示 サウンド 通信 コンパイラ オープンソース開発環境 RCX H8 (8bit, 16MHz) 32K ( 含むファームウェア ) センサ 3ch モータ 3ch 液晶 8bit PCM 赤外線 GCC f
 1 デバイス I/O 表示 サウンド 通信 コンパイラ オープンソース開発環境 RCX H8 (8bit, 16MHz) 32K ( 含むファームウェア ) センサ 3ch モータ 3ch 液晶 8bit PCM 赤外線 GCC f") ET ソフトウェアデザインロボットコンテスト 2009 年 NXT 走行体 & 開発環境 実施説明会資料 Embedded Technology Software Design Robot Contest NXT 走行体 開発環境 nxtosek/jsp 開発環境 C 言語サンプルプログラム 目次 1 RCX vs. NXT 機能 CPU メモリサイズ ( バイト ) 1 デバイス I/O 表示 サウンド
ET ソフトウェアデザインロボットコンテスト 2009 年 NXT 走行体 & 開発環境 実施説明会資料 Embedded Technology Software Design Robot Contest NXT 走行体 開発環境 nxtosek/jsp 開発環境 C 言語サンプルプログラム 目次 1 RCX vs. NXT 機能 CPU メモリサイズ ( バイト ) 1 デバイス I/O 表示 サウンド
Microsoft PowerPoint - 01_Vengineer.ppt
 Software Driven Verification テストプログラムは C 言語で! SystemVerilog DPI-C を使えば こんなに便利に! 2011 年 9 月 30 日 コントローラ開発本部コントローラプラットフォーム第五開発部 宮下晴信 この資料で使用するシステム名 製品名等は一般にメーカーや 団体の登録商標などになっているものもあります なお この資料の中では トレードマーク
Software Driven Verification テストプログラムは C 言語で! SystemVerilog DPI-C を使えば こんなに便利に! 2011 年 9 月 30 日 コントローラ開発本部コントローラプラットフォーム第五開発部 宮下晴信 この資料で使用するシステム名 製品名等は一般にメーカーや 団体の登録商標などになっているものもあります なお この資料の中では トレードマーク
TOPPERS基礎ロボコンセミナー
 ET ロボコン向け TOPPERS 活用セミナー mruby on EV3RT+TECS を使ったアプリ開発環境 小南靖雄 (TOPPERS 個人会員 ) 2018 年 6 月 11 日 1 目次 EV3に対してmrubyで操作できること mruby on EV3RT+TECSの仕組み mruby on EV3RT+TECSのリアルタイム性能 環境構築 mrubyのビルド EV3Way 向けとETロボコン向け設定
ET ロボコン向け TOPPERS 活用セミナー mruby on EV3RT+TECS を使ったアプリ開発環境 小南靖雄 (TOPPERS 個人会員 ) 2018 年 6 月 11 日 1 目次 EV3に対してmrubyで操作できること mruby on EV3RT+TECSの仕組み mruby on EV3RT+TECSのリアルタイム性能 環境構築 mrubyのビルド EV3Way 向けとETロボコン向け設定
CoIDE 用 F4D_VCP の説明 V /07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x
 による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x") CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
【注意事項】RXファミリ 組み込み用TCP/IP M3S-T4-Tiny
 注意事項 RX ファミリ組み込み用 TCP/IP M3S-T4-Tiny R20TS0227JJ0100 Rev.1.00 号 概要 RX ファミリ組み込み用 TCP/IP M3S-T4-Tiny ( 注 ) の使用上の注意事項を連絡します 1. Ping Reply パケットに関する注意事項 2. LAN ネットワーク環境に関する注意事項 3. select() 関数のタイムアウト設定値に関する注意事項
注意事項 RX ファミリ組み込み用 TCP/IP M3S-T4-Tiny R20TS0227JJ0100 Rev.1.00 号 概要 RX ファミリ組み込み用 TCP/IP M3S-T4-Tiny ( 注 ) の使用上の注意事項を連絡します 1. Ping Reply パケットに関する注意事項 2. LAN ネットワーク環境に関する注意事項 3. select() 関数のタイムアウト設定値に関する注意事項
目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い 10.Netフレームワーク 10 開発資料 10 第 2 章 Mono 11 Monoの歴史 1
 ポリテクセンター埼玉セミナー資料 組込み技術者のための C# Monoを用いたマルチプラットフォームアプリケーション開発技術 第 1.2 版 2018 年 8 月 Microbrains Inc. 渋谷 目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い
ポリテクセンター埼玉セミナー資料 組込み技術者のための C# Monoを用いたマルチプラットフォームアプリケーション開発技術 第 1.2 版 2018 年 8 月 Microbrains Inc. 渋谷 目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い
Microsoft PowerPoint - C言語の復習(配布用).ppt [互換モード]
![Microsoft PowerPoint - C言語の復習(配布用).ppt [互換モード]](/thumbs/96/127138597.jpg "Microsoft PowerPoint - C言語の復習(配布用).ppt [互換モード]") if 文 (a と b の大きい方を表示 ) C 言語 Ⅰ の復習 条件判定 (if, 条件式 ) ループ (for[ 二重まで ], while, do) 配列 ( 次元 次元 ) トレース int a, b; printf( 整数 a: ); scanf( %d, &a); printf( 整数 b: ); scanf( %d, &b); //つのif 文で表現する場合間違えやすい どっちに =
if 文 (a と b の大きい方を表示 ) C 言語 Ⅰ の復習 条件判定 (if, 条件式 ) ループ (for[ 二重まで ], while, do) 配列 ( 次元 次元 ) トレース int a, b; printf( 整数 a: ); scanf( %d, &a); printf( 整数 b: ); scanf( %d, &b); //つのif 文で表現する場合間違えやすい どっちに =
SysMLに関する操作方法について
 SysML に関する 操作方法について (2017/12/21 版 ) SparxSystems Japan Co., Ltd. 前提 設定 2 利用条件 以下のいずれかの条件を満たすことが必要 Enterprise Architect+ 有償アドイン MDG Technology for SysML EA Suite システムエンジニアリング版あるいはアルティメット版 ( これらのエディションには
SysML に関する 操作方法について (2017/12/21 版 ) SparxSystems Japan Co., Ltd. 前提 設定 2 利用条件 以下のいずれかの条件を満たすことが必要 Enterprise Architect+ 有償アドイン MDG Technology for SysML EA Suite システムエンジニアリング版あるいはアルティメット版 ( これらのエディションには
(1) プログラムの開始場所はいつでも main( ) メソッドから始まる 順番に実行され add( a,b) が実行される これは メソッドを呼び出す ともいう (2)add( ) メソッドに実行が移る この際 add( ) メソッド呼び出し時の a と b の値がそれぞれ add( ) メソッド
 プログラムの開始場所はいつでも main( ) メソッドから始まる 順番に実行され add( a,b) が実行される これは メソッドを呼び出す ともいう (2)add( ) メソッドに実行が移る この際 add( ) メソッド呼び出し時の a と b の値がそれぞれ add( ) メソッド") メソッド ( 教科書第 7 章 p.221~p.239) ここまでには文字列を表示する System.out.print() やキーボードから整数を入力する stdin.nextint() などを用いてプログラムを作成してきた これらはメソッドと呼ばれるプログラムを構成する部品である メソッドとは Java や C++ などのオブジェクト指向プログラミング言語で利用されている概念であり 他の言語での関数やサブルーチンに相当するが
メソッド ( 教科書第 7 章 p.221~p.239) ここまでには文字列を表示する System.out.print() やキーボードから整数を入力する stdin.nextint() などを用いてプログラムを作成してきた これらはメソッドと呼ばれるプログラムを構成する部品である メソッドとは Java や C++ などのオブジェクト指向プログラミング言語で利用されている概念であり 他の言語での関数やサブルーチンに相当するが
Oracle Un お問合せ : Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ
:5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ") Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
intra-mart Accel Platform — 招待機能プログラミングガイド 初版
 Copyright 2016 NTT DATA INTRAMART CORPORATION 1 Top 目次 1. 改訂情報 2. はじめに 3. 権限リストを拡張する 2 改訂情報 変更年月日 変更内容 2016-04-01 初版 3 はじめに 項目 このガイドについて このガイドについて このガイドでは 招待機能の拡張方法および注意点について解説します 4 権限リストを拡張する 項目 この機能について実装済みの招待権限デコレータ実装方法設定方法
Copyright 2016 NTT DATA INTRAMART CORPORATION 1 Top 目次 1. 改訂情報 2. はじめに 3. 権限リストを拡張する 2 改訂情報 変更年月日 変更内容 2016-04-01 初版 3 はじめに 項目 このガイドについて このガイドについて このガイドでは 招待機能の拡張方法および注意点について解説します 4 権限リストを拡張する 項目 この機能について実装済みの招待権限デコレータ実装方法設定方法
Caché SQL ゲートウェイの使用法
 Caché SQL ゲートウェイの 使用法 Version 5.1 2006-03-14 InterSystems Corporation 1 Memorial Drive Cambridge MA 02142 www.intersystems.com Caché SQL ゲートウェイの使用法 Caché Version 5.1 2006-03-14 Copyright 2006 InterSystems
Caché SQL ゲートウェイの 使用法 Version 5.1 2006-03-14 InterSystems Corporation 1 Memorial Drive Cambridge MA 02142 www.intersystems.com Caché SQL ゲートウェイの使用法 Caché Version 5.1 2006-03-14 Copyright 2006 InterSystems
1. 使用する信号 1.1. UART 信号 UART 通信に使用する信号と接続相手との接続は以下の通りです UART 信号表 番号 CPU 機能名 CPU 信号名 基板コネクタピン番号 方向 接続相手の信号名 1 USART1_TX PA9 CN > RxD 2 USART1_R
 TrueSTUDIO 用 L152CD_UART1 の説明 V001 2014/10/22 UART( 非同期シリアル通信 ) で送受信を行う STM32L152C-DISCO のプロジェクトサンプルです STM32L152C-DISCO は STMicroelectronics 社製の Cortex-M3 ARM CPU である STM32L152RCT6 を搭載した基板です 試用版の開発ツール
TrueSTUDIO 用 L152CD_UART1 の説明 V001 2014/10/22 UART( 非同期シリアル通信 ) で送受信を行う STM32L152C-DISCO のプロジェクトサンプルです STM32L152C-DISCO は STMicroelectronics 社製の Cortex-M3 ARM CPU である STM32L152RCT6 を搭載した基板です 試用版の開発ツール
プレポスト【問題】
 コース名 : 基礎から学ぶ!Excel VBA による業務の自動化 受講日 氏名 1 Excel VBA を使用するメリットとして誤っているものを 1 つ選びなさい 1. 手作業では手間のかかる作業も プログラムに記述した処理は一括して実行されるため 何段階ものメニュー操作を行う必要がなくなる 2. プログラムに書いた処理は記述どおりに実行されるため だれがいつ何回行っても確実な処理がなされ 誤動作を防ぐことができる
コース名 : 基礎から学ぶ!Excel VBA による業務の自動化 受講日 氏名 1 Excel VBA を使用するメリットとして誤っているものを 1 つ選びなさい 1. 手作業では手間のかかる作業も プログラムに記述した処理は一括して実行されるため 何段階ものメニュー操作を行う必要がなくなる 2. プログラムに書いた処理は記述どおりに実行されるため だれがいつ何回行っても確実な処理がなされ 誤動作を防ぐことができる
Microsoft PowerPoint - 09.pptx
 情報処理 Ⅱ 第 9 回 2014 年 12 月 22 日 ( 月 ) 関数とは なぜ関数 関数の分類 自作関数 : 自分で定義する. ユーザ関数 ユーザ定義関数 などともいう. 本日のテーマ ライブラリ関数 : 出来合いのもの.printf など. なぜ関数を定義するのか? 処理を共通化 ( 一般化 ) する プログラムの見通しをよくする 機能分割 ( モジュール化, 再利用 ) 責任 ( あるいは不具合の発生源
情報処理 Ⅱ 第 9 回 2014 年 12 月 22 日 ( 月 ) 関数とは なぜ関数 関数の分類 自作関数 : 自分で定義する. ユーザ関数 ユーザ定義関数 などともいう. 本日のテーマ ライブラリ関数 : 出来合いのもの.printf など. なぜ関数を定義するのか? 処理を共通化 ( 一般化 ) する プログラムの見通しをよくする 機能分割 ( モジュール化, 再利用 ) 責任 ( あるいは不具合の発生源
PowerPoint Presentation
 Armv8-M セキュアマイコンプログラミングテクニック 技術チーム / 殿下 信二 このセッションの目的 Armv8-M セキュアマイコンの使い方の基礎を学ぶ Cortex-M マイコンと Armv8-M セキュアマイコンの違い 簡単です Armv8-M セキュアマイコンプログラミング なぜセキュアマイコンが必要ですか? 製品が偽造 模造 過剰生産されるリスクの低減 IoT 製品のメリット ( コネクティビティ
Armv8-M セキュアマイコンプログラミングテクニック 技術チーム / 殿下 信二 このセッションの目的 Armv8-M セキュアマイコンの使い方の基礎を学ぶ Cortex-M マイコンと Armv8-M セキュアマイコンの違い 簡単です Armv8-M セキュアマイコンプログラミング なぜセキュアマイコンが必要ですか? 製品が偽造 模造 過剰生産されるリスクの低減 IoT 製品のメリット ( コネクティビティ
intra-mart Accel Platform — IM-Repository拡張プログラミングガイド 初版
 Copyright 2018 NTT DATA INTRAMART CORPORATION 1 Top 目次 1. 改訂情報 2. はじめに 2.1. 本書の目的 2.2. 対象読者 2.3. サンプルコードについて 2.4. 本書の構成 3. 辞書項目 API 3.1. 最新バージョン 3.1.1. 最新バージョンの辞書を取得する 3.2. 辞書項目 3.2.1. 辞書項目を取得する 3.2.2.
Copyright 2018 NTT DATA INTRAMART CORPORATION 1 Top 目次 1. 改訂情報 2. はじめに 2.1. 本書の目的 2.2. 対象読者 2.3. サンプルコードについて 2.4. 本書の構成 3. 辞書項目 API 3.1. 最新バージョン 3.1.1. 最新バージョンの辞書を取得する 3.2. 辞書項目 3.2.1. 辞書項目を取得する 3.2.2.
Undestand の解析 Understand の C 言語で抽出できない依存関係について サンプルコードを用いて説明します 確認バージョン Understand 3.0 (Build 640) Understand 3.1 (Build 700) Understand 4.0 (Build 78
 Understand 3.1 (Build 700) Understand 4.0 (Build 78") Undestand の解析 Understand の C 言語で抽出できない依存関係について サンプルコードを用いて説明します 確認バージョン Understand 3.0 (Build 640) Understand 3.1 (Build 700) Understand 4.0 (Build 788) 抽出できない依存関係 Understand の C 言語の解析 (Fuzzy/Strict) で
Undestand の解析 Understand の C 言語で抽出できない依存関係について サンプルコードを用いて説明します 確認バージョン Understand 3.0 (Build 640) Understand 3.1 (Build 700) Understand 4.0 (Build 788) 抽出できない依存関係 Understand の C 言語の解析 (Fuzzy/Strict) で
Microsoft PowerPoint RT講習会(送付用)_ [互換モード]
![Microsoft PowerPoint RT講習会(送付用)_ [互換モード]](/thumbs/96/126720805.jpg "Microsoft PowerPoint RT講習会(送付用)_ [互換モード]") データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞
 ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
Java プログラミング Ⅰ 7 回目 switch 文と論理演算子 今日の講義講義で学ぶ内容 switch 文 論理演算子 条件演算子 条件判断文 3 switch 文 switch 文 式が case のラベルと一致する場所から直後の break; まで処理しますどれにも一致致しない場合 def
 Java プログラミング Ⅰ 7 回目 switch 文と論理演算子 今日の講義講義で学ぶ内容 switch 文 論理演算子 条件演算子 条件判断文 3 switch 文 switch 文 式が case のラベルと一致する場所から直後の まで処理しますどれにも一致致しない場合 default: から直後の まで処理します 式の結果 ラベル 定数 整数または文字 (byte, short, int,
Java プログラミング Ⅰ 7 回目 switch 文と論理演算子 今日の講義講義で学ぶ内容 switch 文 論理演算子 条件演算子 条件判断文 3 switch 文 switch 文 式が case のラベルと一致する場所から直後の まで処理しますどれにも一致致しない場合 default: から直後の まで処理します 式の結果 ラベル 定数 整数または文字 (byte, short, int,
press-1005.OHP
 TOPPERS プロジェクト合同プレス発表会 TOPPERS プロジェクトの最新状況と ET ロボコンへのプラットフォーム提供 2010 年 5 月 12 日 高田広章 NPO 法人 TOPPERS プロジェクト会長名古屋大学大学院情報科学研究科教授附属組込みシステム研究センター長 Email: [email protected] URL: http://www.ertl.jp/~hiro/ TOPPERS
TOPPERS プロジェクト合同プレス発表会 TOPPERS プロジェクトの最新状況と ET ロボコンへのプラットフォーム提供 2010 年 5 月 12 日 高田広章 NPO 法人 TOPPERS プロジェクト会長名古屋大学大学院情報科学研究科教授附属組込みシステム研究センター長 Email: [email protected] URL: http://www.ertl.jp/~hiro/ TOPPERS
スライド 1
 Integration between GitLab and Fuego Tomohito Esaki 江崎朋人 IGEL Co., Ltd. 自己紹介 主に組込向けのソフトウェア開発 Android の Camera HAL, Camera driver Android, Tizen IVI のポーティング wayland/weston の導入 Android, Tizen, wayland application
Integration between GitLab and Fuego Tomohito Esaki 江崎朋人 IGEL Co., Ltd. 自己紹介 主に組込向けのソフトウェア開発 Android の Camera HAL, Camera driver Android, Tizen IVI のポーティング wayland/weston の導入 Android, Tizen, wayland application
第 3 回 TERAS 成果報告会 TERAS V3 紹介と今後の展開 Tool Environment for Reliable and Accountable Software 一般社団法人 TERAS 理事開発委員長渡辺政彦 2014 年 3 月 12 日
 第 3 回 TERAS 成果報告会 TERAS V3 紹介と今後の展開 Tool Environment for Reliable and Accountable Software 一般社団法人 TERAS 理事開発委員長渡辺政彦 2014 年 3 月 12 日 最新 TERAS V3 2011 年度 Ver.1 2012 年度 Ver.2 2013 年度 Ver.3 成果物間リンク - ファイル単位
第 3 回 TERAS 成果報告会 TERAS V3 紹介と今後の展開 Tool Environment for Reliable and Accountable Software 一般社団法人 TERAS 理事開発委員長渡辺政彦 2014 年 3 月 12 日 最新 TERAS V3 2011 年度 Ver.1 2012 年度 Ver.2 2013 年度 Ver.3 成果物間リンク - ファイル単位
Java講座
 ~ 第 1 回 ~ 情報科学部コンピュータ科学科 2 年竹中優 プログラムを書く上で Hello world 基礎事項 演算子 構文 2 コメントアウト (//, /* */, /** */) をしよう! インデントをしよう! 変数などにはわかりやすい名前をつけよう! 要するに 他人が見て理解しやすいコードを書こうということです 3 1. Eclipse を起動 2. ファイル 新規 javaプロジェクト
~ 第 1 回 ~ 情報科学部コンピュータ科学科 2 年竹中優 プログラムを書く上で Hello world 基礎事項 演算子 構文 2 コメントアウト (//, /* */, /** */) をしよう! インデントをしよう! 変数などにはわかりやすい名前をつけよう! 要するに 他人が見て理解しやすいコードを書こうということです 3 1. Eclipse を起動 2. ファイル 新規 javaプロジェクト
UML は次のように表記を拡張して 利用しやすくすることができる ステレオタイプ クラス図などで モデル要素の意味を拡張するもの ギルメット << >> によるラベル表記と アイコン表記がある <<actor>> <<interface>> ステレオタイプ一覧 UML 表記の拡張 ATM 利用者 ス
 以降のページは HP で公開しているため 書き写し不要 UML の各図 ダイアグラム役割開発フェーズ図 ユースケース図 システムの要件定義アクターとシステム また外部システムとの関係を明記 分析 ( 要件定義 ) クラス図 システムの静的な部分の設計図 オブジェクト図 クラス図から作られるオブジェクト ( インスタンス ) の具体的な構成図 パッケージ図 パッケージの階層関係と依存関係を明記 ( パッケージ
以降のページは HP で公開しているため 書き写し不要 UML の各図 ダイアグラム役割開発フェーズ図 ユースケース図 システムの要件定義アクターとシステム また外部システムとの関係を明記 分析 ( 要件定義 ) クラス図 システムの静的な部分の設計図 オブジェクト図 クラス図から作られるオブジェクト ( インスタンス ) の具体的な構成図 パッケージ図 パッケージの階層関係と依存関係を明記 ( パッケージ
Microsoft Word - tutorial3-dbreverse.docx
 株式会社チェンジビジョン使用バージョン :astah* 6.0, 6.1 [ ] サンプル サポート対象外 目次 DB リバースを使ってみよう ( サンプル サポート対象外 ) 2 ご利用の前に 2 予備知識 2 データベースの環境設定をしてみよう 2 astah* データベースリバースコンポーネントを使用してみよう 5 作成した asta ファイルを astah* professional で開いてみよう
株式会社チェンジビジョン使用バージョン :astah* 6.0, 6.1 [ ] サンプル サポート対象外 目次 DB リバースを使ってみよう ( サンプル サポート対象外 ) 2 ご利用の前に 2 予備知識 2 データベースの環境設定をしてみよう 2 astah* データベースリバースコンポーネントを使用してみよう 5 作成した asta ファイルを astah* professional で開いてみよう
DPC-0401
 Interface USB Driver (I/O-CD) DPC-0401 USB 拡張 I/O 用 Windows ドライバ Help for Windows www.interface.co.jp 目次 第 1 章はじめに...3 1.1 概要...3 1.2 各 I/O に対応したドライバ...3 第 2 章製品仕様...4 2.1 基本仕様...4 2.2 製品構成...4 2.3 クラスライブラリの参照方法...5
Interface USB Driver (I/O-CD) DPC-0401 USB 拡張 I/O 用 Windows ドライバ Help for Windows www.interface.co.jp 目次 第 1 章はじめに...3 1.1 概要...3 1.2 各 I/O に対応したドライバ...3 第 2 章製品仕様...4 2.1 基本仕様...4 2.2 製品構成...4 2.3 クラスライブラリの参照方法...5
ブート領域、フラッシュ領域の分割方法 RL78ファミリ用Cコンパイラ CC-RL
 ブート領域 フラッシュ領域の分割方法 RL78 ファミリ用 C コンパイラ CC-RL 2016 年 10 月 5 日 Rev.2.00 ソフトウエア事業部 ソフトウエア技術部 ルネサスシステムデザイン株式会社 R20UT3475JJ0200 アジェンダ はじめにページ 3 概要ページ 4 ブート領域 フラッシュ領域共通ページ 12 ブート領域ページ 19 フラッシュ領域ページ 38 デバッグツールページ
ブート領域 フラッシュ領域の分割方法 RL78 ファミリ用 C コンパイラ CC-RL 2016 年 10 月 5 日 Rev.2.00 ソフトウエア事業部 ソフトウエア技術部 ルネサスシステムデザイン株式会社 R20UT3475JJ0200 アジェンダ はじめにページ 3 概要ページ 4 ブート領域 フラッシュ領域共通ページ 12 ブート領域ページ 19 フラッシュ領域ページ 38 デバッグツールページ
break 文 switch ブロック内の実行中の処理を強制的に終了し ブロックから抜けます switch(i) 強制終了 ソースコード例ソースファイル名 :Sample7_1.java // 入力値の判定 import java.io.*; class Sample7_1 public stati
 強制終了 ソースコード例ソースファイル名 :Sample7_1.java // 入力値の判定 import java.io.*; class Sample7_1 public stati") Java プログラミング Ⅰ 7 回目 switch 文と論理演算子 今日の講義で学ぶ内容 switch 文 論理演算子 条件演算子 条件判断文 3 switch 文 switch 文 式が case のラベルと一致する場所から直後の まで処理しますどれにも一致しない場合 default: から直後の まで処理します 式は byte, short, int, char 型 ( 文字または整数 ) を演算結果としますラベルには整数リテラル
Java プログラミング Ⅰ 7 回目 switch 文と論理演算子 今日の講義で学ぶ内容 switch 文 論理演算子 条件演算子 条件判断文 3 switch 文 switch 文 式が case のラベルと一致する場所から直後の まで処理しますどれにも一致しない場合 default: から直後の まで処理します 式は byte, short, int, char 型 ( 文字または整数 ) を演算結果としますラベルには整数リテラル
Java演習(4) -- 変数と型 --
 -- 変数と型 --") 50 20 20 5 (20, 20) O 50 100 150 200 250 300 350 x (reserved 50 100 y 50 20 20 5 (20, 20) (1)(Blocks1.java) import javax.swing.japplet; import java.awt.graphics; (reserved public class Blocks1 extends
50 20 20 5 (20, 20) O 50 100 150 200 250 300 350 x (reserved 50 100 y 50 20 20 5 (20, 20) (1)(Blocks1.java) import javax.swing.japplet; import java.awt.graphics; (reserved public class Blocks1 extends
3/7 マイグレーション開発方針 顧客名 0 作成者 根岸正 < プログラム移行方針 > システム名称 A-VX システムマイグレーション作成日 2015/09/01 < COBOL 資産のプログラム移行 > COBOLソース ( メインとCOPYLIB) を入力としてSCC 言語変換ツールにてVB
 を入力としてSCC 言語変換ツールにてVB") 3/7 マイグレーション開発方針 顧客名 0 作成者 根岸正 < プログラム移行方針 > システム名称 A-VX システムマイグレーション作成日 2015/09/01 < COBOL 資産のプログラム移行 > COBOLソース ( メインとCOPYLIB) を入力としてSCC 言語変換ツールにてVB.netソリューションを作成します言語変換後にSDK( ソフトウェア開発キット ) にてデバッグおよびビルドにて実行可能アプリケーションを作成します
3/7 マイグレーション開発方針 顧客名 0 作成者 根岸正 < プログラム移行方針 > システム名称 A-VX システムマイグレーション作成日 2015/09/01 < COBOL 資産のプログラム移行 > COBOLソース ( メインとCOPYLIB) を入力としてSCC 言語変換ツールにてVB.netソリューションを作成します言語変換後にSDK( ソフトウェア開発キット ) にてデバッグおよびビルドにて実行可能アプリケーションを作成します
個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 1
 和歌山支所岩橋正実 1") 個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 [email protected] [email protected] 1 改善効果 品質 : フロントローディングが進み流出不具合 0 継続生産性 : 平均 130% 改善 工数割合分析
個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 [email protected] [email protected] 1 改善効果 品質 : フロントローディングが進み流出不具合 0 継続生産性 : 平均 130% 改善 工数割合分析
インテル(R) Visual Fortran コンパイラ 10.0
 Visual Fortran コンパイラ 10.0") インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
エンジニアリング・サービスから見たMBD導入の成功・失敗
 2014 年 12 月 18 日 ( 金 ) 16:40-16:55 JMAAB 中部コンファレンス エンジニアリング サービスから見た MBD 導入の成功 失敗 COPYRIGHT (C) GAIO TECHNOLOGY ALL RIGHTS RESERVED 1 ガイオ テクノロジーとは 組み込み業界向け検証ツールメーカー コンパイラ 検証 テスト 解析ツール プロトタイピングツール エンジニアリングサービス
2014 年 12 月 18 日 ( 金 ) 16:40-16:55 JMAAB 中部コンファレンス エンジニアリング サービスから見た MBD 導入の成功 失敗 COPYRIGHT (C) GAIO TECHNOLOGY ALL RIGHTS RESERVED 1 ガイオ テクノロジーとは 組み込み業界向け検証ツールメーカー コンパイラ 検証 テスト 解析ツール プロトタイピングツール エンジニアリングサービス
TOPPERS 活用アイデア アプリケーション開発 コンテスト 部門 : 活用アイデア部門アプリケーション開発部門がじぇるね IoT 部門作品のタイトル : TOPPERS_ASP3 カーネルと astah*-uml による状態マシン図でのソフト設計と動作検証の試み作成者 : 塩出武 ( しおでたけ
 TOPPERS 活用アイデア アプリケーション開発 コンテスト 部門 : 活用アイデア部門アプリケーション開発部門がじぇるね IoT 部門作品のタイトル : TOPPERS_ASP3 カーネルと astah*-uml による状態マシン図でのソフト設計と動作検証の試み作成者 : 塩出武 ( しおでたけし ) 共同作業者 : 対象者 使用する開発成果物 目的 狙い : Astah を使用してソフト設計をされている方
TOPPERS 活用アイデア アプリケーション開発 コンテスト 部門 : 活用アイデア部門アプリケーション開発部門がじぇるね IoT 部門作品のタイトル : TOPPERS_ASP3 カーネルと astah*-uml による状態マシン図でのソフト設計と動作検証の試み作成者 : 塩出武 ( しおでたけし ) 共同作業者 : 対象者 使用する開発成果物 目的 狙い : Astah を使用してソフト設計をされている方
PHP プログラムからの利用 (i5_connect) <html> <head><title> シンプルな PHP</title></head> <body> DBCS 漢字 / 半角かなをパラメータで i5 に渡す場合には i5 への接続時にこの記述が必要 <?php $conn = i5_co
 <html> <head><title> シンプルな PHP</title></head> <body> DBCS 漢字 / 半角かなをパラメータで i5 に渡す場合には i5 への接続時にこの記述が必要 <?php $conn = i5_co") PHP プログラムからの利用 i5_connect 関数でユーザセッションを確立 i5_* 関数で任意の API を実行 i5_close 関数でユーザセッションを切断 PHP プログラムから i5/os のサービスにアクセスするためには i5/os に登録されているユーザ名とパスワードによる認証を行い ユーザセッションを確立する必要があります resource i5_connect (string
PHP プログラムからの利用 i5_connect 関数でユーザセッションを確立 i5_* 関数で任意の API を実行 i5_close 関数でユーザセッションを切断 PHP プログラムから i5/os のサービスにアクセスするためには i5/os に登録されているユーザ名とパスワードによる認証を行い ユーザセッションを確立する必要があります resource i5_connect (string
 GUI Graphical User interface ジェンウェアスリー 情報家電から産業機器まで あらゆる分野のGUI開発で 驚異的な効率UPを実現する新世代ソリューション GUI開発工数 ソフトウェア構成 GUI統合開発環境 GENWARE3は GUIエディタ と GUIライブラリ で構成されています (ジェンウェアスリー) GUIライブラリ(ミドルウェア)( ) GUIエディタ (ジェンスケッチスリー)
GUI Graphical User interface ジェンウェアスリー 情報家電から産業機器まで あらゆる分野のGUI開発で 驚異的な効率UPを実現する新世代ソリューション GUI開発工数 ソフトウェア構成 GUI統合開発環境 GENWARE3は GUIエディタ と GUIライブラリ で構成されています (ジェンウェアスリー) GUIライブラリ(ミドルウェア)( ) GUIエディタ (ジェンスケッチスリー)
EV3_APIの解説.pptx
 ET ロボコン向け TOPPERS 活 セミナー EV3 API の解説 2016 年 6 11 ( ) 松原豊 ( 名古屋 学 ) 川拓也 の資料を基に作成 1 EV3RT の提供する EV3 API API を提供するモジュール 覧 サーボモータ 各種センサ 超 波, ジャイロ, タッチ, カラー LCD ファイルシステム シリアル送受信機能を含む EV3 本体機能 バッテリ, ボタン,LED,
ET ロボコン向け TOPPERS 活 セミナー EV3 API の解説 2016 年 6 11 ( ) 松原豊 ( 名古屋 学 ) 川拓也 の資料を基に作成 1 EV3RT の提供する EV3 API API を提供するモジュール 覧 サーボモータ 各種センサ 超 波, ジャイロ, タッチ, カラー LCD ファイルシステム シリアル送受信機能を含む EV3 本体機能 バッテリ, ボタン,LED,
PowerPoint Presentation
 ETAS の AUTO ソリューションイータス株式会社 1 Public STJ2/ETAS 2014-01 ETAS GmbH 2014. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, イータス株式会社会社概要 ETAS Driving Embedded Excellence
ETAS の AUTO ソリューションイータス株式会社 1 Public STJ2/ETAS 2014-01 ETAS GmbH 2014. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, イータス株式会社会社概要 ETAS Driving Embedded Excellence
株式会社アルウィン C 言語コーディング規約 ver.0.1
 C 言語コーディング規約 ver.0.1 1. はじめに本コーディング規約は ( 株 ) アルウィン社内で作成する C 言語ソースコードの可読性 メンテナンス性の向上 丌具合の混入を防ぎやすくするための記述方法及び 推奨する記述方法を記述した文書である 2. 目的 本コーディング規約は ソースコードの可読性 メンテナンス性の向上 丌具合の混入 を可能な限り防ぎ 品質の高いソースコードを作成する一助とすることを目的とする
C 言語コーディング規約 ver.0.1 1. はじめに本コーディング規約は ( 株 ) アルウィン社内で作成する C 言語ソースコードの可読性 メンテナンス性の向上 丌具合の混入を防ぎやすくするための記述方法及び 推奨する記述方法を記述した文書である 2. 目的 本コーディング規約は ソースコードの可読性 メンテナンス性の向上 丌具合の混入 を可能な限り防ぎ 品質の高いソースコードを作成する一助とすることを目的とする
エンティティ : インタフェースを定義 entity HLFDD is port (, : in std_logic ;, : out std_logic ) ; end HLFDD ; アーキテクチャ : エンティティの実現 architecture RH1 of HLFDD is <= xor
 ; end HLFDD ; アーキテクチャ : エンティティの実現 architecture RH1 of HLFDD is <= xor") VHDL を使った PLD 設計のすすめ PLD 利用のメリット 小型化 高集積化 回路の修正が容易 VHDL 設計のメリット 汎用の設計になる ( どこのデバイスにも搭載可能 ) 1/16 2001/7/13 大久保弘崇 http://www.aichi-pu.ac.jp/ist/~ohkubo/ 2/16 設計の再利用が促進 MIL 記号の D での設計との比較 Verilog-HDL などでも別に同じ
VHDL を使った PLD 設計のすすめ PLD 利用のメリット 小型化 高集積化 回路の修正が容易 VHDL 設計のメリット 汎用の設計になる ( どこのデバイスにも搭載可能 ) 1/16 2001/7/13 大久保弘崇 http://www.aichi-pu.ac.jp/ist/~ohkubo/ 2/16 設計の再利用が促進 MIL 記号の D での設計との比較 Verilog-HDL などでも別に同じ
Microsoft PowerPoint - 集積回路工学_ ppt[読み取り専用]
![Microsoft PowerPoint - 集積回路工学_ ppt[読み取り専用]](/thumbs/88/116763841.jpg "Microsoft PowerPoint - 集積回路工学_ ppt[読み取り専用]") 2007.11.12 集積回路工学 Matsuzawa Lab 1 集積回路工学 東京工業大学 大学院理工学研究科 電子物理工学専攻 2007.11.12 集積回路工学 Matsuzawa Lab 2 1. 1. ハードウェア記述言語 (VHDL で回路を設計 ) HDL 設計の手順や基本用語を学ぶ RTL とは? Register Transfer Level レジスタ間の転送関係を表現したレベル慣例的に以下のことを行う
2007.11.12 集積回路工学 Matsuzawa Lab 1 集積回路工学 東京工業大学 大学院理工学研究科 電子物理工学専攻 2007.11.12 集積回路工学 Matsuzawa Lab 2 1. 1. ハードウェア記述言語 (VHDL で回路を設計 ) HDL 設計の手順や基本用語を学ぶ RTL とは? Register Transfer Level レジスタ間の転送関係を表現したレベル慣例的に以下のことを行う
第3部:プログラミング実習
 第 3 部 : プログラミング実習 会津大学 university of aizu 1 手順 1: サンプルコンポーネントの実行 university of aizu 2 実習概要 サンプルコンポーネントで起動したコンポーネントの接続の仕方などを学びます university of aizu 3 使用機材 Raspberry Pi ARM プロセッサを搭載したシングルボードコンピュータ SD カードに書き込んだ
第 3 部 : プログラミング実習 会津大学 university of aizu 1 手順 1: サンプルコンポーネントの実行 university of aizu 2 実習概要 サンプルコンポーネントで起動したコンポーネントの接続の仕方などを学びます university of aizu 3 使用機材 Raspberry Pi ARM プロセッサを搭載したシングルボードコンピュータ SD カードに書き込んだ
 COBOL Standard Edition COBOL SQL アクセスのご紹介 2017 年 3 本電気株式会社 次 COBOL SQLアクセスとは P.4 COBOL85 SQLEXTENSIONからの移 P.10 製品情報 P.13 COBOL SQL アクセスとは 製品概要 COBOL ソース中の埋め込み SQL によるデータベースアクセスが可能に 業界標準 ODBC(Open DataBase
COBOL Standard Edition COBOL SQL アクセスのご紹介 2017 年 3 本電気株式会社 次 COBOL SQLアクセスとは P.4 COBOL85 SQLEXTENSIONからの移 P.10 製品情報 P.13 COBOL SQL アクセスとは 製品概要 COBOL ソース中の埋め込み SQL によるデータベースアクセスが可能に 業界標準 ODBC(Open DataBase
内容 1. 仕様 動作確認条件 ハードウェア説明 使用端子一覧 ソフトウェア説明 動作概要 ファイル構成 オプション設定メモリ 定数一覧 変数一
 RX210 グループ IRQ 割り込みを使用したパルス出力 要旨 本サンプルコードでは IRQ 割り込みが発生すると 一定期間タイマでパルスを出力する 方法について説明します 対象デバイス RX210 1 / 25 内容 1. 仕様... 3 2. 動作確認条件... 3 3. ハードウェア説明... 3 3.1 使用端子一覧... 3 4. ソフトウェア説明... 4 4.1 動作概要... 4
RX210 グループ IRQ 割り込みを使用したパルス出力 要旨 本サンプルコードでは IRQ 割り込みが発生すると 一定期間タイマでパルスを出力する 方法について説明します 対象デバイス RX210 1 / 25 内容 1. 仕様... 3 2. 動作確認条件... 3 3. ハードウェア説明... 3 3.1 使用端子一覧... 3 4. ソフトウェア説明... 4 4.1 動作概要... 4
Microsoft Word - matlab-coder-code-generation-quick-start-guide-japanese-r2016a
 MATLAB コードを使用した C コードの生成クイックスタートガイド (R2016a) 最初のスタンドアロン C コードの生成 スタンドアロン C コードを生成するには [ ビルド ] を [ ソースコード ] [ スタティックライブラリ ] [ ダイナミックライブラリ ] または [ 実行ファイル ] のいずれかに切り替えます MATLAB Coder を使用することで MATLAB コードから
MATLAB コードを使用した C コードの生成クイックスタートガイド (R2016a) 最初のスタンドアロン C コードの生成 スタンドアロン C コードを生成するには [ ビルド ] を [ ソースコード ] [ スタティックライブラリ ] [ ダイナミックライブラリ ] または [ 実行ファイル ] のいずれかに切り替えます MATLAB Coder を使用することで MATLAB コードから
JACi400のご紹介~RPGとHTMLで簡単Web化~
 セッション No.4 JACi400 のご紹介 ~RPG と HTML で簡単 Web 化 ~ 株式会社ミガロ RAD 事業部技術支援課営業推進岩井利枝 1 Agenda ミガロご提供ソリューションのご紹介 JACi400の概要 4つの開発ステップのご紹介 JACi400ご利用のメリット 2 ミガロご提供ソリューション 開発ツール (C/S Web 開発 ) Delphi/400 開発ツール (Web
セッション No.4 JACi400 のご紹介 ~RPG と HTML で簡単 Web 化 ~ 株式会社ミガロ RAD 事業部技術支援課営業推進岩井利枝 1 Agenda ミガロご提供ソリューションのご紹介 JACi400の概要 4つの開発ステップのご紹介 JACi400ご利用のメリット 2 ミガロご提供ソリューション 開発ツール (C/S Web 開発 ) Delphi/400 開発ツール (Web
2008年度 設計手法標準化アンケート 集計結果
 2011 年度 設計手法普及調査アンケート 集計経過報告 2012 年 2 月社団法人組込みシステム技術協会状態遷移設計研究会 目次 1. アンケート実施の目的 3 2. アンケートの実施対象 4 3. アンケート回答数 5 4. 実施したアンケートの内容 6 5. アンケート回答者の構成 8 6. アンケート集計結果 9 6.1 回答者の担当製品分野について 10 6.2 回答者の部門について 11
2011 年度 設計手法普及調査アンケート 集計経過報告 2012 年 2 月社団法人組込みシステム技術協会状態遷移設計研究会 目次 1. アンケート実施の目的 3 2. アンケートの実施対象 4 3. アンケート回答数 5 4. 実施したアンケートの内容 6 5. アンケート回答者の構成 8 6. アンケート集計結果 9 6.1 回答者の担当製品分野について 10 6.2 回答者の部門について 11
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for
 を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for") RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
アクティビティ図・シーケンス図からのコード生成 機能ガイド
 Code generation from Activity/Sequence diagrams by SparxSystems Japan アクティビティ図 シーケンス図からのコード生成機能ガイド (2018/05/16 最終更新 ) 1 はじめに このドキュメントでは ユニファイド版あるいはアルティメット版を利用してアクティ ビティ図やシーケンス図からソースコード生成を行うための手順の概要を紹介しています
Code generation from Activity/Sequence diagrams by SparxSystems Japan アクティビティ図 シーケンス図からのコード生成機能ガイド (2018/05/16 最終更新 ) 1 はじめに このドキュメントでは ユニファイド版あるいはアルティメット版を利用してアクティ ビティ図やシーケンス図からソースコード生成を行うための手順の概要を紹介しています
RX210 グループ MTU2 を用いた相補 PWM モードの波形出力 要旨 本サンプルコードでは MTU2 を用いて相補 PWM モードの波形を出力する方法について説 明します 対象デバイス RX210 1 / 41
 RX210 グループ MTU2 を用いた相補 PWM モードの波形出力 要旨 本サンプルコードでは MTU2 を用いて相補 PWM モードの波形を出力する方法について説 明します 対象デバイス RX210 1 / 41 内容 1. 仕様... 3 2. 動作確認条件... 3 3. ハードウェア説明... 4 3.1 使用端子一覧... 4 4. ソフトウェア説明... 5 4.1 動作概要...
RX210 グループ MTU2 を用いた相補 PWM モードの波形出力 要旨 本サンプルコードでは MTU2 を用いて相補 PWM モードの波形を出力する方法について説 明します 対象デバイス RX210 1 / 41 内容 1. 仕様... 3 2. 動作確認条件... 3 3. ハードウェア説明... 4 3.1 使用端子一覧... 4 4. ソフトウェア説明... 5 4.1 動作概要...
Java言語 第1回
 Java 言語 第 2 回簡単な Java プログラムの作成と実行 知的情報システム工学科 久保川淳司 [email protected] 簡単な Java プログラム Java プログラムのファイル名 Java プログラムのファイル名命名ルール ファイル名とクラス名は同じでなければならない HelloJava.java public class HelloJava { public
Java 言語 第 2 回簡単な Java プログラムの作成と実行 知的情報システム工学科 久保川淳司 [email protected] 簡単な Java プログラム Java プログラムのファイル名 Java プログラムのファイル名命名ルール ファイル名とクラス名は同じでなければならない HelloJava.java public class HelloJava { public