Presentation Title
|
|
|
- しょうじ だいほうじ
- 7 years ago
- Views:
Transcription


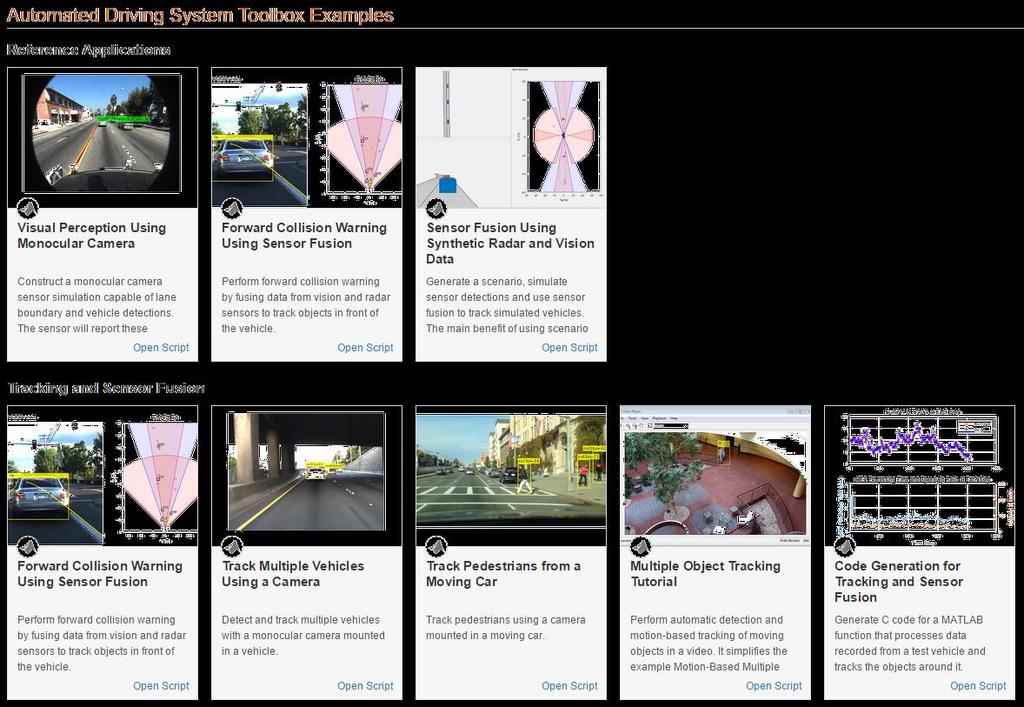
1 Automated Driving System Toolbox TM ~ ADAS/ 自動運転の開発 検証プラットフォーム ~ MathWorks Japan アプリケーションエンジニアリング部 乙部雅則 2017 The MathWorks, Inc. 1

2 ADAS/ 自動運転開発に関して良くある悩み F 2 vehicle センサーデータの 可視化を どう行うか? センサーフュージョン 判断ロジック をいかに開発し 検証するか? 認知部分の開発 検証をいかに 効率よく行うか? 2
3 Automated Driving System Toolbox コンセプト : 1. センサデータの可視化 2. テストシナリオ生成 3. 自動運転に関連する画像処理やトラッキングアルゴリズム 4. Ground Truth ラベリングツール 各種認識 センサデータの可視化機能 半自動ラベリングツール 道路の定義 アクターと移動の定義 3
4 Automated Driving System Toolbox コンセプト : 1. センサデータの可視化 2. テストシナリオ生成 3. 自動運転に関連する画像処理やトラッキングアルゴリズム 4. Ground Truth ラベリングツール 各種認識 センサデータの可視化機能 半自動ラベリングツール 道路の定義 アクターと移動の定義 4
5 ADAS/ 自動運転開発に関して良くある悩み F 2 vehicle センサーデータの 可視化を どう行うか? センサーフュージョン 判断ロジック をいかに開発し 検証するか? 認知部分の開発 検証をいかに 効率よく行うか? 5
6 ユースケース 1 センサーフュージョンアルゴリズム開発 ~ 多様な入力データを用いた センサーフュージョン開発環境の提供 (1)~ 実レーダーモジュールログデータログデータ実カメラモジュール オブジェクトリスト センサーフュージョンや判断 のアルゴリズム開発 Object list Target 1 Class: car Location: [x y] Velocity Target 2 Class: pedestrian Location: [x y] Target X Lane markers Marker 1 Curve model: A, B, C Marker 2 7
 をプロット ビデオへのアノテーション")
7 ユースケース 1 センサーフュージョンアルゴリズム開発 提供機能センサーフュージョンとトラッキングフレームワーク トラックの生成 消滅の管理各種トラッキングのフィルタと運動モデル 線形, 拡張 & unscented カルマンフィルタ 速度一定, 加速度一定 回転速度一定可視化機能 検出結果表示とトラッキング向け 2 次元鳥瞰図表示 前方撮影ビデオへの カメラ レーダーモジュール出力の合成サンプルプログラム カメラとレーダーを用いた 前方衝突警告 単眼カメラによる 複数の車両トラッキング 実カメラ レーダーモジュールの出力 ( オブジェクトリスト ) をプロット ビデオへのアノテーション センサーフュージョン デモ 8

8 センサーデータの可視化 画像座標 車両座標 ( 鳥瞰図 ) 9

; im = imshow(frame,.")
9 画像座標への表示 %% Specify time to inspect currenttime = 6.55; video.currenttime = currenttime; %% Extract video frame frame = video.readframe; %% Plot image coordinates ax1 = axes(... 'Position',[ ]); im = imshow(frame,... 'Parent',ax1); 画像座標への表示 ( 各種画像処理用関数 ): imshow 等 11

![85]); bep = birdseyeplot(... 'Parent',ax2,... 'Xlimits',[0 45],.](/docs-images/96/130471128/images/10-4.jpg ".. 'Ylimits',[-10 10]); legend('off'); 鳥瞰図へのプロット : birdseyeplot 12")
10 鳥瞰図への表示 : 車両座標 ISO 8855 車両座標系 前方 : x 正方向 左 : y 正方向 x y %% Plot in vehicle coordinates ax2 = axes(... 'Position',[ ]); bep = birdseyeplot(... 'Parent',ax2,... 'Xlimits',[0 45],... 'Ylimits',[-10 10]); legend('off'); 鳥瞰図へのプロット : birdseyeplot 12

.y],... % Position y sensorparams(1).range,... sensorparams(1).yawangle,.")
11 センサーの検出範囲の可視化 ( 鳥瞰図 ) %% Create coverage area plotter covplot = coverageareaplotter(bep,... 'FaceColor','blue',... 'EdgeColor','blue'); %% Update coverage area plotter plotcoveragearea(covplot,... [sensorparams(1).x... % Position x sensorparams(1).y],... % Position y sensorparams(1).range,... sensorparams(1).yawangle,... sensorparams(1).fov(1)) % Field of view センサーの検出範囲の表示 : coverageareaplotter 13
; numdets = vision(n).numobjects; pos = zeros(numdets,3); vel = zeros(numdets,3); labels = repmat({''},numdets,1); for k = 1:numDets pos(k,:) = vision(n).object(k).position; vel(k,:) = vision(n).")
12 認識結果の可視化 ( 車両座標 ) %% Create detection plotter detplot = detectionplotter(bep,... 'MarkerEdgeColor','blue',... 'Marker','^'); %% Update detection plotter n = round(currenttime/0.05); numdets = vision(n).numobjects; pos = zeros(numdets,3); vel = zeros(numdets,3); labels = repmat({''},numdets,1); for k = 1:numDets pos(k,:) = vision(n).object(k).position; vel(k,:) = vision(n).object(k).velocity; labels{k} = num2str(... vision(n).object(k).classification); end 画像認識結果のプロット : detectionplotter detectionplotter は 画像センサー レーダー LiDAR 等の結果のプロットに使用可 plotdetection(detplot,pos,vel,labels); 14
.object(k).position(1:2)'; imposlr = vehicletoimage(sensor, vehposlr); boxheight = 1.4 * 1333 / vehposlr(1); boxwidth = 1.")
13 検出結果のプロット ( 画像座標 ) %% Bounding box positions in image coordinates imboxes = zeros(numdets,4); for k = 1:numDets if vision(n).object(k).classification == 5 vehposlr = vision(n).object(k).position(1:2)'; imposlr = vehicletoimage(sensor, vehposlr); boxheight = 1.4 * 1333 / vehposlr(1); boxwidth = 1.8 * 1333 / vehposlr(1); imboxes(k,:)=[imposlr(1) - boxwidth/2,... imposlr(2) - boxheight,... boxwidth, boxheight]; end end %% Draw bounding boxes on image frame frame = insertobjectannotation(frame,... 'Rectangle', imboxes, labels,... 'Color','yellow','LineWidth',2); im.cdata = frame; 境界ボックスのプロット : insertobjectannotation 車両座標から画像座標への変換 : vehicletoimage 15
; 区画線を鳥瞰図へプロット : laneboundaryplotter %% Update lane detection plotter lb = paraboliclaneboundary([... lane(n).left.curvature,... lane(n).left.headingangle,... lane(n).left.offset]); rb = paraboliclaneboundary([.")
14 区画線の可視化 ( 鳥瞰図 ) %% Create lane detection plotter laneplot = laneboundaryplotter(bep,... 'Color','black'); 区画線を鳥瞰図へプロット : laneboundaryplotter %% Update lane detection plotter lb = paraboliclaneboundary([... lane(n).left.curvature,... lane(n).left.headingangle,... lane(n).left.offset]); rb = paraboliclaneboundary([... lane(n).right.curvature,... lane(n).right.headingangle,... lane(n).right.offset]); plotlaneboundary(laneplot, [lb rb]) 16

![.. [lb rb], sensor, (1:100),.](/docs-images/96/130471128/images/15-3.jpg ".. 'LineWidth',5); im.")
15 区画線の可視化 ( 画像座標 ) %% Draw in image coordinates frame = insertlaneboundary(frame,... [lb rb], sensor, (1:100),... 'LineWidth',5); im.cdata = frame; 区画線を画像へプロット : insertlaneboundary 17


16 LiDAR 信号処理 LiDAR: Light Detection And Ranging レーザーによる高精度な距離測定 [ 3 次元点群処理用の各種関数 ] - 3 次元表示機能 - ノイズ除去 - 点群データの間引き - 幾何学形状 ( 面等 ) へのフィッティング - 垂線の計算 - 複数点群の位置あわせ - 複数点群のマージ MATLAB を用いることでデータの可視化や解析 アルゴリズム開発の効率化 赤 : 障害物 緑 : 路面 デモ 27
17 複数オブジェクトのトラキング 複数オブジェクトトラッカー 検出 Track Manager Tracking Filter トラック Time Measurement Measurement Noise 検出結果のトラックへの割当て 新しいトラックの生成 現有トラックの更新 古いトラックの削除 トラックの状態の予測 更新 カルマンフィルター : 線形 拡張 unscented Time State State Covariance Track ID Age Is Confirmed Is Coasted 28
18 ユースケース 1 センサーフュージョンアルゴリズム開発 ~ 多様な入力データを用いた センサーフュージョン開発環境の提供 (1)~ 実レーダーモジュールログデータログデータ実カメラモジュール オブジェクトリスト センサーフュージョンや判断 のアルゴリズム開発 Object list Target 1 Class: car Location: [x y] Velocity Target 2 Class: pedestrian Location: [x y] Target X Lane markers Marker 1 Curve model: A, B, C Marker 2 37

![Target 1 Class: car Location: [x y] Velocity Target 2 Class: pedestrian](/docs-images/96/130471128/images/19-2.jpg "Location: [x y] Target X Lane markers Marker 1 Curve model: A, B, C")
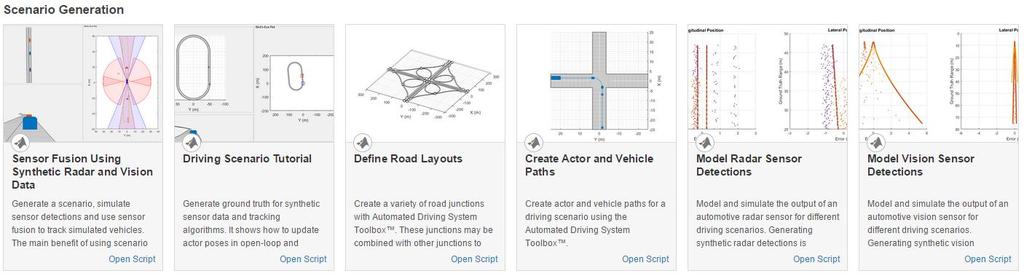
19 ユースケース 2 センサーフュージョンアルゴリズム開発 ~ 多様な入力データを用いた センサーフュージョン開発環境の提供 (2) ~ シナリオ生成 レーダーモデル カメラモデル オブジェクトリスト センサーフュージョンや判断 のアルゴリズム開発 Object list Target 1 Class: car Location: [x y] Velocity Target 2 Class: pedestrian Location: [x y] Target X Lane markers Marker 1 Curve model: A, B, C Marker 2 デモ 38
![道路の定義 %% Create a new scenario s = drivingscenario('sampletime', 0.05); %% Create road road(s, [ 0 0;... % Centers [x,y] (m) 45 0],... 5); % Width (m) road(s, [35 20;... 35-10],.](/docs-images/96/130471128/images/20-2.jpg ".. 5); 道路端の座標 道幅を指定 : road %% Plot scenario p1 = uipanel('position',[0.5 0 0.5 1]); a1 = axes('parent',p1); plot(s,'parent',a1,... 'Centerline','on','Waypoints','on') a1.xlim = [0 45]; a1.")
20 道路の定義 %% Create a new scenario s = drivingscenario('sampletime', 0.05); %% Create road road(s, [ 0 0;... % Centers [x,y] (m) 45 0],... 5); % Width (m) road(s, [35 20; ],... 5); 道路端の座標 道幅を指定 : road %% Plot scenario p1 = uipanel('position',[ ]); a1 = axes('parent',p1); plot(s,'parent',a1,... 'Centerline','on','Waypoints','on') a1.xlim = [0 45]; a1.ylim = [-6 20]; 41
![道路の定義 s = drivingscenario; % Highways road(s, [-300-8 0; 300-8 0], 15); % north road(s, [-300 8 0; 300 8 0], 15); % south road(s, [-8-300 8; -8 300 8], 15); % east road(s, [ 8-300 8;](/docs-images/96/130471128/images/21-2.jpg "8 300 8], 15); % west % Inner ramps rampne = [0-18 0; 20-18 0; 120-120 4; 18-20 8; 18 0 8]; rampnw = [ 1-1 1].* rampne(end:-1:1,:); rampsw = [-1-1 1].* rampne; rampse = [ 1-1 1].")
![* rampsw(end:-1:1,:); innerramps = [rampne(1:end-1,:) rampnw(1:end-1,:) rampsw(1:end-1,:) rampse]; road(s, innerramps, 5.4); % Outer ramps roadcenters = [13.](/docs-images/96/130471128/images/21-3.jpg "5-300 8; 15-260 8; 125-125 4; 260-15 0; 300-13.5 0]; road(s, [ 1 1 1].* roadcenters, 5.4); road(s, [ 1-1 1].* roadcenters, 5.4); road(s, [-1-1 1].* roadcenters, 5.4); road(s, [-1 1 1].")
21 道路の定義 s = drivingscenario; % Highways road(s, [ ; ], 15); % north road(s, [ ; ], 15); % south road(s, [ ; ], 15); % east road(s, [ ; ], 15); % west % Inner ramps rampne = [0-18 0; ; ; ; ]; rampnw = [ 1-1 1].* rampne(end:-1:1,:); rampsw = [-1-1 1].* rampne; rampse = [ 1-1 1].* rampsw(end:-1:1,:); innerramps = [rampne(1:end-1,:) rampnw(1:end-1,:) rampsw(1:end-1,:) rampse]; road(s, innerramps, 5.4); % Outer ramps roadcenters = [ ; ; ; ; ]; road(s, [ 1 1 1].* roadcenters, 5.4); road(s, [ 1-1 1].* roadcenters, 5.4); road(s, [-1-1 1].* roadcenters, 5.4); road(s, [-1 1 1].* roadcenters, 5.4); 3 次元構造も可能 42
 28-1.25;... 30-1.25;... 36.25 4;.")
![.. 36.25 6;... 36.25 14]; speed = 13.](/docs-images/96/130471128/images/22-3.jpg "89; % (m/s) = 50 km/hr path(egocar, waypoints, speed);")
22 自車の定義 %% Add ego vehicle egocar = vehicle(s); waypoints = [ ;... % [x y] (m) ; ; ; ; ]; speed = 13.89; % (m/s) = 50 km/hr path(egocar, waypoints, speed); 自車の軌跡 スピードの指定 : path 43
![自車の定義 %% Add ego vehicle egocar = vehicle(s); waypoints = [ 2-1.25;... % [x y] (m) 28-1.25;... 30-1.25;... 36.25 4;... 36.25 6;... 36.25 14]; speed = 13.](/docs-images/96/130471128/images/23-3.jpg "89; % (m/s) = 50 km/hr path(egocar, waypoints, speed); %% Play scenario while advance(s) end pause(s.sampletime); 自車の軌跡 スピードの指定 : path 44")
23 自車の定義 %% Add ego vehicle egocar = vehicle(s); waypoints = [ ;... % [x y] (m) ; ; ; ; ]; speed = 13.89; % (m/s) = 50 km/hr path(egocar, waypoints, speed); %% Play scenario while advance(s) end pause(s.sampletime); 自車の軌跡 スピードの指定 : path 44
![対向車と歩行者の指定 %% Add Target vehicle targetvehicle = vehicle(s); path(targetvehicle,... [44 1; -4 1],... % Waypoints (m) [5 ; 14]); % Speeds (m/s) %% Add child pedestrian actor child = actor(s,'length',0.](/docs-images/96/130471128/images/24-3.jpg "24,... 'Width',0.45,... 'Height',1.7,... 'Position',[40-5 0],... 'Yaw',180); path(child,... [30 15; 40 15],... % Waypoints (m) 1.")
24 対向車と歩行者の指定 %% Add Target vehicle targetvehicle = vehicle(s); path(targetvehicle,... [44 1; -4 1],... % Waypoints (m) [5 ; 14]); % Speeds (m/s) %% Add child pedestrian actor child = actor(s,'length',0.24,... 'Width',0.45,... 'Height',1.7,... 'Position',[40-5 0],... 'Yaw',180); path(child,... [30 15; 40 15],... % Waypoints (m) 1.39); % Speed (m/s) = 5 km/hr 歩行者 (actor) の大きさと軌跡を指定 対向車の軌跡と速度の指定 ( 加速 ) 45
![後方から車両に追従する視点の追加 %% Add chase view (left) p2 = uipanel('position',[0 0 0.5 1]); a2 = axes('parent',p2); chaseplot(egocar,.](/docs-images/96/130471128/images/25-3.jpg ".. 'Parent',a2,... 'Centerline','on',... 'ViewHeight',3.5,.")
25 後方から車両に追従する視点の追加 %% Add chase view (left) p2 = uipanel('position',[ ]); a2 = axes('parent',p2); chaseplot(egocar,... 'Parent',a2,... 'Centerline','on',... 'ViewHeight',3.5,... % (m) 'ViewLocation',[-8 0]); % [x y] (m) 自車両に追従する視点を追加 : chaseplot 46
; a2 = axes('parent',p2); chaseplot(egocar,... 'Parent',a2,.")
 'ViewLocation',[-8 0]); % [x y] (m) 車両に追従する視点を追加 : chaseplot %% Play")
26 後方から車両に追従する視点の追加 %% Add chase view (left) p2 = uipanel('position',[ ]); a2 = axes('parent',p2); chaseplot(egocar,... 'Parent',a2,... 'Centerline','on',... 'ViewHeight',3.5,... % (m) 'ViewLocation',[-8 0]); % [x y] (m) 車両に追従する視点を追加 : chaseplot %% Play scenario restart(s) while advance(s) pause(s.sampletime); end 47
27 センサーの特性 : カメラモジュール ( 画像センサー ) の場合 距離の効果 距離推定の精度は 物体までの距離が離れるに従い劣化 横方向の角度の精度は 検出範囲内で一定 隠れの効果 部分的を含む隠れに認識が弱い 道路勾配効果 水平線より高く見える場合 検出精度の劣化 勾配が異なることで 距離推定精度の劣化 センサーモデルには パラメータで 認識可能距離 精度やノイズ含め様々な特性を持たせることが出来ます 48
![画像センサーの定義 %% Create vision detection generator sensor = visiondetectiongenerator(... 'SensorLocation', [0.75*egoCar.Wheelbase 0],... 'Height', 1.1,... 'Pitch', 1,... 'Intrinsics', cameraintrinsics(.](/docs-images/96/130471128/images/28-2.jpg ".. 800,... % Focal length [320 240],... % Principal point [480 640],... % Image size 'RadialDistortion',[0 0],... 'TangentialDistortion',[0 0]),... 'UpdateInterval', s.sampletime,.")
28 画像センサーの定義 %% Create vision detection generator sensor = visiondetectiongenerator(... 'SensorLocation', [0.75*egoCar.Wheelbase 0],... 'Height', 1.1,... 'Pitch', 1,... 'Intrinsics', cameraintrinsics( ,... % Focal length [ ],... % Principal point [ ],... % Image size 'RadialDistortion',[0 0],... 'TangentialDistortion',[0 0]),... 'UpdateInterval', s.sampletime,... 'BoundingBoxAccuracy', 5,... 'MaxRange', 150,... 'ActorProfiles', actorprofiles(s)); カメラの設置パラメータ cameraintrinsics により検出範囲を規定 レーダーのモデルの定義の場合 : radardetectiongenerator 49
; a3 = axes('parent',p3); bep = birdseyeplot('parent',a3,... 'Xlimits', [0 20],.")
![.. 'Ylimits', [-10 10]); legend(a3,'off'); センサー出力の表示 : birdseyeplot % Create plotters covplot = coverageareaplotter(bep,... 'FaceColor','blue',.](/docs-images/96/130471128/images/29-3.jpg ".. 'EdgeColor','blue'); plotcoveragearea(covplot,... sensor.sensorlocation,sensor.maxrange,... sensor.yaw,sensor.")
29 センサー出力の表示用に 鳥瞰図を生成 %% Add sensor birds eye plot (top left) p3 = uipanel('position',[ ]); a3 = axes('parent',p3); bep = birdseyeplot('parent',a3,... 'Xlimits', [0 20],... 'Ylimits', [-10 10]); legend(a3,'off'); センサー出力の表示 : birdseyeplot % Create plotters covplot = coverageareaplotter(bep,... 'FaceColor','blue',... 'EdgeColor','blue'); plotcoveragearea(covplot,... sensor.sensorlocation,sensor.maxrange,... sensor.yaw,sensor.fieldofview(1)) detplot = detectionplotter(bep,... 'MarkerEdgeColor','blue',... 'Marker','^'); truthplot = outlineplotter(bep); 50
,... s.simulationtime); % Update plotters if isempty(det) cleardata(detplot) else % Unpack measurements to position/velocity pos = cellfun(@(d)d.measurement(1:2),.")
30 センサーモデルと共にシミュレーション restart(s) while advance(s) % Get detections in ego vehicle coordinates det = sensor(targetposes(egocar),... s.simulationtime); % Update plotters if isempty(det) cleardata(detplot) else % Unpack measurements to position/velocity pos = cellfun(@(d)d.measurement(1:2),... det,'uniformoutput',false); vel = cellfun(@(d)d.measurement(4:5),... det,'uniformoutput',false); plotdetection(detplot,... cell2mat(pos')', cell2mat(vel')'); end [p, y, l, w, oo, c] = targetoutlines(egocar); plotoutline(truthplot,p,y,l,w,... 'OriginOffset', oo, 'Color', c); end 51
31 ADAS/ 自動運転開発に関して良くある悩み F 2 vehicle センサーデータの 可視化を どう行うか? センサーフュージョン 判断ロジック をいかに開発し 検証するか? 認知部分の開発 検証をいかに 効率よく行うか? 53
 座標系の変換")

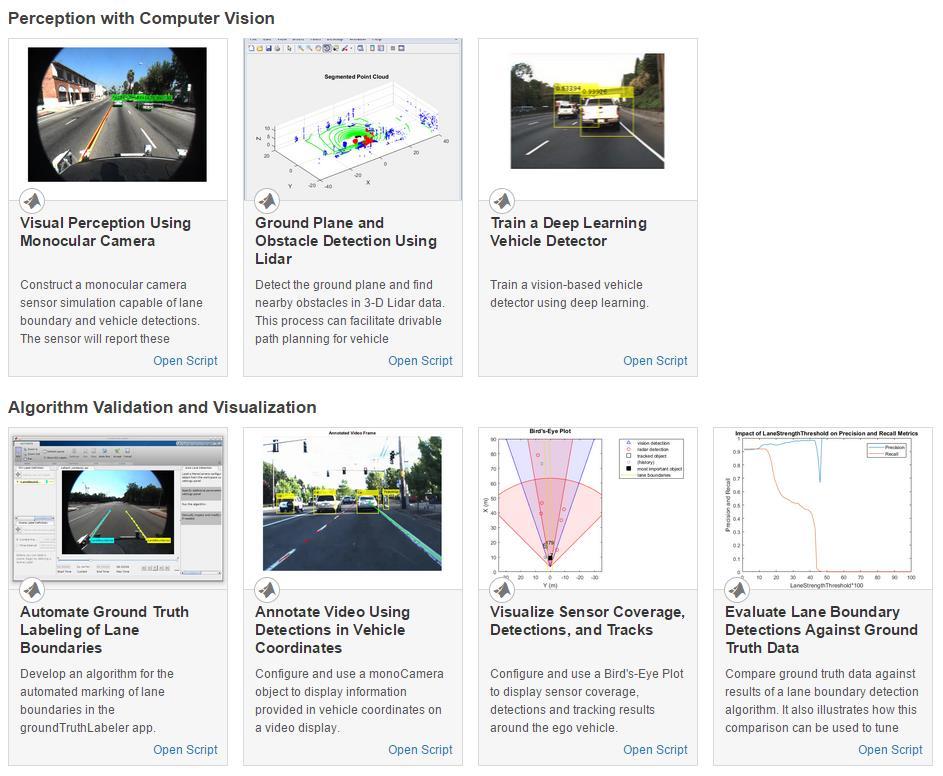
32 ユースケース 3 単眼カメラによる認識アルゴリズムモデル 提供機能アルゴリズム RANSACによる区画線フィッティング 車検出器 ( 深層学習 ACF) 座標系の変換 車両座標系 < > 画像座標系の変換 単眼画像による 物体までの距離推定可視化機能 区画線 鳥瞰図 ビデオデータに対するカメラモジュール動作のシミュレーション ( ビデオデータから オブジェクトリストの生成 ) デモ 54


33 ユースケース 3a カメラモジュールのプロトタイピング カメラモジュールの内部アルゴリズムの理解 プロトタイピング カメラモジュールのシミュレーションモデル 実カメラ 動画データ 鳥瞰図への変換 区画線のペイント部分の検出 区画線を曲線へフィッティング 自動車 歩行者 自転車等の認識 標識 信号の判断 検出 認識結果 55

34 ユースケース 3b アルゴリズムをラベリングの自動化に適用 ユースケース 4 56


35 深層学習 (Deep Learning for Automated Driving ) 深層学習フレームワーク R-CNN Fast R-CNN Faster R-CNN 回帰 学習済みの深層学習ネットワーク 車検出器 Caffe モデルの取込み 学習済みのネットワークの取込み AlexNet VGG-16 Network VGG-19 Network 回帰 複数 GPU での学習高速化 Neural Network Toolbox, Parallel Computing Toolbox TM compute capability 3.0 以上の CUDA GPU が必要 57
36 認識器 ビデオ認識器認識結果 機械学習 深層学習 Aggregate Channel Feature Cascade R-CNN (Regions with Convolutional Neural Networks) Fast R-CNN Faster R-CNN trainacfobjectdetector traincascadeobjectdetector trainrcnnobjectdetector trainfastrcnnobjectdetector trainfasterrcnnobjectdetector 64
37 認識器の評価 ビデオ 認識器 認識結果 検証 Ground Truth ラベリングツール Ground truth 65
 - 手動で付けた ROI の間のフレームで ROI 位置を直線近似 - 車検出器で自動ラベリング - カスタムアルゴリズムを使い自動ラベリングするための API ファイルもしくは MATLAB へ結果の出力 ROI ラベルの定義 ( 矩形もしくはポリライン ) シーンラベルの定義 (1 フレームずつもしくは区間 ) ビデオコントロール デモ 66")
38 カスタマイズ可能な半自動 Ground Truth ラベリングツール 動画ファイル連番静止画ファイルカスタム関数による読込み 画像やデータの表示に関しても API によりカスタマイズ可能 半自動ラベリング機能 (3 つの半自動アルゴリズム ) - 先頭フレームに手動でつけた ROI を 後続フレームで自動ラベリング ( 画像特徴量を使ったトラッキング ) - 手動で付けた ROI の間のフレームで ROI 位置を直線近似 - 車検出器で自動ラベリング - カスタムアルゴリズムを使い自動ラベリングするための API ファイルもしくは MATLAB へ結果の出力 ROI ラベルの定義 ( 矩形もしくはポリライン ) シーンラベルの定義 (1 フレームずつもしくは区間 ) ビデオコントロール デモ 66
39 カスタマイズ : Ground Truth Labeler App 独自のファイル読込み関数 : groundtruthdatasource 73

40 カスタマイズ : Ground Truth Labeler App 独自の自動ラベリングアルゴリズム driving.automation.automationalgorithm 74


41 カスタマイズ :Ground Truth Labeler App 他の表示関数やデータとの同期表示 driving.connector.connector 75
42 多くのサンプルプログラムを同梱 ADAS/ 自動運転開発に関連する機能をサンプルとして提供 スターティングポイントとして 更に機能を拡張 カスタマイズして必要な機能を実装 78
43 Automated Driving System Toolbox F 2 vehicle センサーデータの 可視化 センサーフュージョン 判断ロジックの開発 認識の開発 検証 センサーデータのプロット 検知領域の表示 トラッキングアルゴリズム C コード生成 様々な認識用のアルゴリズム 画像座標と 車両座標 ( 鳥瞰図 ) の相互変換 シナリオ生成機能 深層学習 Ground Truth ラベリングツール 79
自動運転・ADASの開発・検証ソリューション
 自動運転 ADAS の開発 検証ソリューション MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 乙部雅則 Automated Driving System Toolbox 2017 The MathWorks, Inc. 1 ADAS/ 自動運転システム レーダー LiDAR ソナー 車両上の IMU 等センサー 外界環境 白線, 標識 天候 障害物 / 歩行者 交通流車両ダイナミクス
自動運転 ADAS の開発 検証ソリューション MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 乙部雅則 Automated Driving System Toolbox 2017 The MathWorks, Inc. 1 ADAS/ 自動運転システム レーダー LiDAR ソナー 車両上の IMU 等センサー 外界環境 白線, 標識 天候 障害物 / 歩行者 交通流車両ダイナミクス
d4-automated-driving-mw
 ADAS 自動運転アルゴリズム検証のためのシナリオ生成とシミュレーション アプリケーションエンジニアリング部大塚慶太郎 2015 The MathWorks, Inc. 1 ADAS 自動運転システムの開発 with MATLAB and Simulink 統合シミュレーション 認識 プランニング 制御 2 ADAS 自動運転 : 運転シナリオの定義 with MATLAB and Simulink
ADAS 自動運転アルゴリズム検証のためのシナリオ生成とシミュレーション アプリケーションエンジニアリング部大塚慶太郎 2015 The MathWorks, Inc. 1 ADAS 自動運転システムの開発 with MATLAB and Simulink 統合シミュレーション 認識 プランニング 制御 2 ADAS 自動運転 : 運転シナリオの定義 with MATLAB and Simulink
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
MATLAB EXPO 2019 Japan プレゼン資料の検討
 自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
PowerPoint Presentation
 Simulink +Unreal Engine 連携による ADAS/ 自動運転シミュレーション環境 MathWorks Japan アプリケーションエンジニアリング部宮川浩 2015 The MathWorks, Inc. 1 Session Key Take Away MathWorks は 自動運転システム開発に必要な フルビークルモデルを提供します 3 自動車業界のメガトレンド Connectivity
Simulink +Unreal Engine 連携による ADAS/ 自動運転シミュレーション環境 MathWorks Japan アプリケーションエンジニアリング部宮川浩 2015 The MathWorks, Inc. 1 Session Key Take Away MathWorks は 自動運転システム開発に必要な フルビークルモデルを提供します 3 自動車業界のメガトレンド Connectivity
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc.
 MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2
 (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2") 問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは 400 200 と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2 for 文を用いて図 3 の様な図形を描くプログラムを作成せよ 但し ウィンドウのサイズは 300 300
問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは 400 200 と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2 for 文を用いて図 3 の様な図形を描くプログラムを作成せよ 但し ウィンドウのサイズは 300 300
PowerPoint Presentation
 ディープラーニングの 実践的な適用ワークフロー MathWorks Japan テクニカルコンサルティング部縣亮 2015 The MathWorks, Inc. 1 アジェンダ ディープラーニングとは?( おさらい ) ディープラーニングの適用ワークフロー ワークフローの全体像 MATLAB によるニューラルネットワークの構築 学習 検証 配布 MATLAB ではじめるメリット 試行錯誤のやりやすさ
ディープラーニングの 実践的な適用ワークフロー MathWorks Japan テクニカルコンサルティング部縣亮 2015 The MathWorks, Inc. 1 アジェンダ ディープラーニングとは?( おさらい ) ディープラーニングの適用ワークフロー ワークフローの全体像 MATLAB によるニューラルネットワークの構築 学習 検証 配布 MATLAB ではじめるメリット 試行錯誤のやりやすさ
Presentation Title
 Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
タイトル
 生活支援ロボット HSR 向け 自律動作アプリケーション開発 アプリケーションエンジニアリング部木川田亘 2015 The MathWorks, Inc. 1 実演 :HSR による あいさつ アプリケーションの開発 2 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 3 アジェンダ 自律ロボット開発における MATLAB ROS を使った
生活支援ロボット HSR 向け 自律動作アプリケーション開発 アプリケーションエンジニアリング部木川田亘 2015 The MathWorks, Inc. 1 実演 :HSR による あいさつ アプリケーションの開発 2 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 3 アジェンダ 自律ロボット開発における MATLAB ROS を使った
ディープラーニングの組み込み機器実装ソリューション ~GPC/CPU編~
 ディープラーニングの組み込み機器実装ソリューション ~GPU/CPU 編 ~ MathWorks Japan アプリケーションエンジニアリング部大塚慶太郎 [email protected] 2018 The MathWorks, Inc. 1 自動運転 : 車 歩行者等の物体認識 白線検出 組み込み GPU への実装 モデル GPU 実装 / 配布 3 医用画像 : 腫瘍等 特定の部位の検出
ディープラーニングの組み込み機器実装ソリューション ~GPU/CPU 編 ~ MathWorks Japan アプリケーションエンジニアリング部大塚慶太郎 [email protected] 2018 The MathWorks, Inc. 1 自動運転 : 車 歩行者等の物体認識 白線検出 組み込み GPU への実装 モデル GPU 実装 / 配布 3 医用画像 : 腫瘍等 特定の部位の検出
医用画像を題材とした3次元画像解析とディープラーニング
 医用画像を題材とした 3 次元画像解析とディープラーニング MathWorks Japan シニアアプリケーションエンジニア大塚慶太郎 [email protected] 2018 The MathWorks, Inc. 1 リリース毎に進化する MATLAB の機能 医用画像処理 自動運転 ロボティクス セキュリティ 3-D Image 3-D Vision SfM Point
医用画像を題材とした 3 次元画像解析とディープラーニング MathWorks Japan シニアアプリケーションエンジニア大塚慶太郎 [email protected] 2018 The MathWorks, Inc. 1 リリース毎に進化する MATLAB の機能 医用画像処理 自動運転 ロボティクス セキュリティ 3-D Image 3-D Vision SfM Point
Presentation Title
 ディープラーニングによる画像認識の基礎と実践ワークフロー MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア福本拓司 2018 The MathWorks, Inc. 1 一般的におこなわれる目視による評価 製造ライン 医用データ 作業現場 インフラ 研究データ 現場での目視 大量画像の収集 専門家によるチェック 2 スマートフォンで撮影した映像をその場で評価
ディープラーニングによる画像認識の基礎と実践ワークフロー MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア福本拓司 2018 The MathWorks, Inc. 1 一般的におこなわれる目視による評価 製造ライン 医用データ 作業現場 インフラ 研究データ 現場での目視 大量画像の収集 専門家によるチェック 2 スマートフォンで撮影した映像をその場で評価
AI技術の紹介とセンサーデータ解析への応用
 AI を活用したセンサーデータ解析 MathWorks Japan アプリケーションエンジニアリンググループアプリケーションエンジニア吉田剛士 2018 The MathWorks, Inc. 1 AI を活用したセンサーデータ解析 11:20-11:50 MATLAB による AI 作成 アプリを使った簡易的な解析 学習モデルのパラメータ自動調整 学習モデルのスタンドアロン化 2 課題 : ターボファンエンジンの予知保全
AI を活用したセンサーデータ解析 MathWorks Japan アプリケーションエンジニアリンググループアプリケーションエンジニア吉田剛士 2018 The MathWorks, Inc. 1 AI を活用したセンサーデータ解析 11:20-11:50 MATLAB による AI 作成 アプリを使った簡易的な解析 学習モデルのパラメータ自動調整 学習モデルのスタンドアロン化 2 課題 : ターボファンエンジンの予知保全
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析
 ホワイトペーパー Excel と MATLAB の連携がデータ解析の課題を解決 製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析に使用することはできず
ホワイトペーパー Excel と MATLAB の連携がデータ解析の課題を解決 製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析に使用することはできず
f2-system-requirement-system-composer-mw
 Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
PowerPoint Presentation
 MATLAB による 大規模フリートデータ解析 アプリケーションエンジニアリング部齊藤甲次朗 2015 The MathWorks, Inc. 1 アジェンダ はじめに ビッグデータ解析の課題 MATLAB を活用したフリートデータ解析事例 フリートデータ解析実践 デスクトップでの解析 クラスターへのスケールアウト MATLAB 解析のシステムへの統合 まとめ 2 25 GB / 1hour 4 フリートデータ解析を含むビッグデータ解析の課題
MATLAB による 大規模フリートデータ解析 アプリケーションエンジニアリング部齊藤甲次朗 2015 The MathWorks, Inc. 1 アジェンダ はじめに ビッグデータ解析の課題 MATLAB を活用したフリートデータ解析事例 フリートデータ解析実践 デスクトップでの解析 クラスターへのスケールアウト MATLAB 解析のシステムへの統合 まとめ 2 25 GB / 1hour 4 フリートデータ解析を含むビッグデータ解析の課題
b4-deeplearning-embedded-c-mw
 ディープラーニングアプリケーション の組み込み GPU/CPU 実装 アプリケーションエンジニアリング部町田和也 2015 The MathWorks, Inc. 1 アジェンダ MATLAB Coder/GPU Coder の概要 ディープニューラルネットワークの組み込み実装ワークフロー パフォーマンスに関して まとめ 2 ディープラーニングワークフローのおさらい Application logic
ディープラーニングアプリケーション の組み込み GPU/CPU 実装 アプリケーションエンジニアリング部町田和也 2015 The MathWorks, Inc. 1 アジェンダ MATLAB Coder/GPU Coder の概要 ディープニューラルネットワークの組み込み実装ワークフロー パフォーマンスに関して まとめ 2 ディープラーニングワークフローのおさらい Application logic
画像分野におけるディープラーニングの新展開
 画像分野におけるディープラーニングの新展開 MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 太田英司 2017 The MathWorks, Inc. 1 画像分野におけるディープラーニングの新展開 物体認識 ( 画像全体 ) 物体の検出と認識物体認識 ( ピクセル単位 ) CNN (Convolutional Neural Network) R-CNN
画像分野におけるディープラーニングの新展開 MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 太田英司 2017 The MathWorks, Inc. 1 画像分野におけるディープラーニングの新展開 物体認識 ( 画像全体 ) 物体の検出と認識物体認識 ( ピクセル単位 ) CNN (Convolutional Neural Network) R-CNN
Processingをはじめよう
 Processing をはじめよう 第 7 章 動きその 2 目次 フレームレート スピードと方向 移動 回転 拡大 縮小 2 点間の移動 乱数 タイマー 円運動 今回はここまで 2 2 点間の移動 Example 7-6 (EX_08_06) 始点 (startx, starty) から終点 (stopx, stopy) まで移動する 座標更新の計算方法は後述 始点と終点を変更しても動作する 変更して確認
Processing をはじめよう 第 7 章 動きその 2 目次 フレームレート スピードと方向 移動 回転 拡大 縮小 2 点間の移動 乱数 タイマー 円運動 今回はここまで 2 2 点間の移動 Example 7-6 (EX_08_06) 始点 (startx, starty) から終点 (stopx, stopy) まで移動する 座標更新の計算方法は後述 始点と終点を変更しても動作する 変更して確認
いまからはじめる、MATLABによる 画像処理・コンピュータビジョン
 先端運転支援システムへ向けた各種画像 コンピュータビジョンアルゴリズム開発環境 MathWorks Japan アプリケーションエンジニアリング部 シニアアプリケーションエンジニア乙部雅則 2014 The MathWorks, Inc. 1 MATLAB / Simulink テスト検証 Test and measurement Model checking Code verification Certification
先端運転支援システムへ向けた各種画像 コンピュータビジョンアルゴリズム開発環境 MathWorks Japan アプリケーションエンジニアリング部 シニアアプリケーションエンジニア乙部雅則 2014 The MathWorks, Inc. 1 MATLAB / Simulink テスト検証 Test and measurement Model checking Code verification Certification
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
目次 第 1 章 : データの記録 再生とセンサーキャリブレーション 1. データの記録 生成 2. センサーキャリブレーション第 2 章 :3 次元地図の作成と自己位置推定 1. 3 次元地図の作成 2. 自己位置推定第 3 章 : 物体検出と信号検出 1. 物体検出 2. 信号検出 第 4 章
 version 1.4 TIER IV ACADEMY 自動運転システム構築塾 Day3 Autoware 演習 目次 第 1 章 : データの記録 再生とセンサーキャリブレーション 1. データの記録 生成 2. センサーキャリブレーション第 2 章 :3 次元地図の作成と自己位置推定 1. 3 次元地図の作成 2. 自己位置推定第 3 章 : 物体検出と信号検出 1. 物体検出 2. 信号検出
version 1.4 TIER IV ACADEMY 自動運転システム構築塾 Day3 Autoware 演習 目次 第 1 章 : データの記録 再生とセンサーキャリブレーション 1. データの記録 生成 2. センサーキャリブレーション第 2 章 :3 次元地図の作成と自己位置推定 1. 3 次元地図の作成 2. 自己位置推定第 3 章 : 物体検出と信号検出 1. 物体検出 2. 信号検出
特別寄稿.indd
 特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
Slide 1
 ハンズオン受講の為の準備講座 これから始める人の為の ディープラーニング基礎講座 村上真奈 NVIDIA CUDA & Deep Learning Solution Architect NVIDIA Corporation 1 機械学習とディープラーニングの関係 AGENDA ディープラーニングとは? ニューラルネットワークの構造 ディープラーニングの学習とは 畳み込みニューラルネットワーク 午後に予定しているハンズオンの為の基礎講座ディープラーニングをこれから始める方を対象に基礎概念や用語の解説を行います
ハンズオン受講の為の準備講座 これから始める人の為の ディープラーニング基礎講座 村上真奈 NVIDIA CUDA & Deep Learning Solution Architect NVIDIA Corporation 1 機械学習とディープラーニングの関係 AGENDA ディープラーニングとは? ニューラルネットワークの構造 ディープラーニングの学習とは 畳み込みニューラルネットワーク 午後に予定しているハンズオンの為の基礎講座ディープラーニングをこれから始める方を対象に基礎概念や用語の解説を行います
MATLAB®製品紹介セミナー
 MATLAB における分類 パターン認識 - 入門編 - MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング部 ) アプリケーションエンジニア大開孝文 2012 The MathWorks, Inc. 1 アジェンダ 回帰モデルと分類モデルについて 分類手法を使ったワインの品質モデリング まとめ 2 分類手法を使ったワインの品質モデリング アプローチ
MATLAB における分類 パターン認識 - 入門編 - MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング部 ) アプリケーションエンジニア大開孝文 2012 The MathWorks, Inc. 1 アジェンダ 回帰モデルと分類モデルについて 分類手法を使ったワインの品質モデリング まとめ 2 分類手法を使ったワインの品質モデリング アプローチ
いまからはじめる、MATLABによる 画像処理・コンピュータビジョン
 自動運転開発に向けた MATLAB/Simulink 活用ソリューションの提案 MathWorks Japan アプリケーションエンジニアリング部乙部雅則 2016 The MathWorks, Inc. 1 Agenda 背景 ユーザー事例紹介 ADAS 自動運転開発 / 検証を取り巻く課題 シミュレーション環境 検出 認識 画像処理 コンピュータビジョン LiDAR 信号処理 レーダー信号処理
自動運転開発に向けた MATLAB/Simulink 活用ソリューションの提案 MathWorks Japan アプリケーションエンジニアリング部乙部雅則 2016 The MathWorks, Inc. 1 Agenda 背景 ユーザー事例紹介 ADAS 自動運転開発 / 検証を取り巻く課題 シミュレーション環境 検出 認識 画像処理 コンピュータビジョン LiDAR 信号処理 レーダー信号処理
地図情報の差分更新・自動図化 概要版
 戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
Systems Research for Cyber-Physical Systems
 自動運転システムにおける 高性能計算技術の応用 加藤真平 名古屋大学大学院情報科学研究科 准教授 Velodyne HDL-64e (3D LIDAR) Velodyne HDL-32e (3D LIDAR) JAVAD RTK-GNSS (GNSS/GPS) HOKUYO UTM-30LX (LIDAR) Point Grey Ladybug 5 (Camera) IBEO LUX 8L (3D
自動運転システムにおける 高性能計算技術の応用 加藤真平 名古屋大学大学院情報科学研究科 准教授 Velodyne HDL-64e (3D LIDAR) Velodyne HDL-32e (3D LIDAR) JAVAD RTK-GNSS (GNSS/GPS) HOKUYO UTM-30LX (LIDAR) Point Grey Ladybug 5 (Camera) IBEO LUX 8L (3D
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
スライド 1
 グラフィックスの世界第 3 回 サイバーメディアセンター サイバーコミュニティ研究部門安福健祐 Processing によるアニメーション setup と draw void setup() size(400, 400); void draw() ellipse( mousex,mousey,100,100); void とか setup とか draw とかはじめて見る が出てきてややこしい ellipseは円描く関数でした
グラフィックスの世界第 3 回 サイバーメディアセンター サイバーコミュニティ研究部門安福健祐 Processing によるアニメーション setup と draw void setup() size(400, 400); void draw() ellipse( mousex,mousey,100,100); void とか setup とか draw とかはじめて見る が出てきてややこしい ellipseは円描く関数でした
きれいなグラフを作ろう!gnuplot 入門 1. 基本 1.1. プロット :test.plt plot x, sin(x) 1.2. データファイルのプロット 1:data.plt plot "data.dat" 1.3. データファイルのプロット 2:data2.plt plot "data2
 1.2. データファイルのプロット 1:data.plt plot data.dat 1.3. データファイルのプロット 2:data2.plt plot data2") きれいなグラフを作ろう!gnuplot 入門 1. 基本 1.1. プロット :test.plt plot x, sin(x) 1.2. データファイルのプロット 1:data.plt plot "data.dat" 1.3. データファイルのプロット 2:data2.plt plot "data2.dat" using 1:3 2. 例題 2.1. カラーマップ :color_map.plt #
きれいなグラフを作ろう!gnuplot 入門 1. 基本 1.1. プロット :test.plt plot x, sin(x) 1.2. データファイルのプロット 1:data.plt plot "data.dat" 1.3. データファイルのプロット 2:data2.plt plot "data2.dat" using 1:3 2. 例題 2.1. カラーマップ :color_map.plt #
Presentation Title
 ( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
スライド 1
 CNN を用いた弱教師学習による画像領域分割 下田和, 柳井啓司 電気通信大学 大学院情報理工学 研究科 総合情報学専攻 c 2015 UEC Tokyo. Convolutional Neural Network CNN クラス分類タスクにおいてトップの精度 CNN の応用 ( 物体位置の認識 ) 物体検出 物体に BB を付与 領域分割 ピクセル単位の認識 CNN を用いた領域分割 CNN による完全教師ありのセグメンテーション
CNN を用いた弱教師学習による画像領域分割 下田和, 柳井啓司 電気通信大学 大学院情報理工学 研究科 総合情報学専攻 c 2015 UEC Tokyo. Convolutional Neural Network CNN クラス分類タスクにおいてトップの精度 CNN の応用 ( 物体位置の認識 ) 物体検出 物体に BB を付与 領域分割 ピクセル単位の認識 CNN を用いた領域分割 CNN による完全教師ありのセグメンテーション
<4D F736F F F696E74202D B B836A F82C982E682E CC835E E93E089E6919C94468EAF82C98AD682B782E98CA48B F18F6F94C5816A2E >
 ディープラーニングによる船舶のタンク ホールド内画像認識に関する研究 国 研究開発法 海上 港湾 航空技術研究所海上技術安全研究所 沖 平 勝 智之 次 1. 背景 2. ニューラルネットワークによる画像認識 ( 物体検出 ) 概要 A)R- B)Fast R-とFaster R- 3. タンク ホールド内画像認識処理システム 4. タンク ホールド内画像認識実験 I 5. タンク ホールド内画像認識実験
ディープラーニングによる船舶のタンク ホールド内画像認識に関する研究 国 研究開発法 海上 港湾 航空技術研究所海上技術安全研究所 沖 平 勝 智之 次 1. 背景 2. ニューラルネットワークによる画像認識 ( 物体検出 ) 概要 A)R- B)Fast R-とFaster R- 3. タンク ホールド内画像認識処理システム 4. タンク ホールド内画像認識実験 I 5. タンク ホールド内画像認識実験
いまからはじめる、MATLABによる 画像処理・コンピュータビジョン
 いまからはじめる MATLAB による画像処理 コンピュータビジョン MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大谷卓也 2012 The MathWorks, Inc. 1 Demo: 顔検出 画像から 人間の顔認識を行い 数のカウントを行う 2 Demo: MRI Analysis モンタージュ画像からの 3 次元構築 3 MATLAB/Simulink
いまからはじめる MATLAB による画像処理 コンピュータビジョン MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大谷卓也 2012 The MathWorks, Inc. 1 Demo: 顔検出 画像から 人間の顔認識を行い 数のカウントを行う 2 Demo: MRI Analysis モンタージュ画像からの 3 次元構築 3 MATLAB/Simulink
基礎輪講2週目 Kinectの話
 基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
b2-reinforcement-learning-mw
 強化学習 最適制御のためのディープラーニングの応用 吉田剛士 2015 The MathWorks, Inc. 1 はじめに強化学習 = Reinforcement Learning AlphaGo がプロ棋士に勝利 (2015) そして 人類を超える (2017) 強化学習の特徴 自律的に学習し賢くなっていく 2 Agenda : 強化学習 ~ 最適制御のためのディープラーニングの応用 ~ 強化学習とは
強化学習 最適制御のためのディープラーニングの応用 吉田剛士 2015 The MathWorks, Inc. 1 はじめに強化学習 = Reinforcement Learning AlphaGo がプロ棋士に勝利 (2015) そして 人類を超える (2017) 強化学習の特徴 自律的に学習し賢くなっていく 2 Agenda : 強化学習 ~ 最適制御のためのディープラーニングの応用 ~ 強化学習とは
Presentation Title
 データの本質を読み解くための機械学習 MATLAB でデータ解析の課題に立ち向かう MathWorks Japan アプリケーションエンジニア部アプリケーションエンジニア井原瑞希 2016 The MathWorks, Inc. 1 Buzzwords IoT 人工知能 / AI データ解析 ビッグデータ 2 データ解析ワークフロー データへのアクセスと探索 データの前処理 予測モデルの構築 システムへの統合
データの本質を読み解くための機械学習 MATLAB でデータ解析の課題に立ち向かう MathWorks Japan アプリケーションエンジニア部アプリケーションエンジニア井原瑞希 2016 The MathWorks, Inc. 1 Buzzwords IoT 人工知能 / AI データ解析 ビッグデータ 2 データ解析ワークフロー データへのアクセスと探索 データの前処理 予測モデルの構築 システムへの統合
最小二乗法とロバスト推定
 はじめに 最小二乗法とロバスト推定 (M 推定 ) Maplesoft / サイバネットシステム ( 株 ) 最小二乗法は データフィッティングをはじめとしてデータ解析ではもっともよく用いられる手法のひとつです Maple では CurveFitting パッケージの LeastSquares コマンドや Statistics パッケージの Fit コマンド NonlinearFit コマンドなどを用いてデータに適合する数式モデルを求めることが可能です
はじめに 最小二乗法とロバスト推定 (M 推定 ) Maplesoft / サイバネットシステム ( 株 ) 最小二乗法は データフィッティングをはじめとしてデータ解析ではもっともよく用いられる手法のひとつです Maple では CurveFitting パッケージの LeastSquares コマンドや Statistics パッケージの Fit コマンド NonlinearFit コマンドなどを用いてデータに適合する数式モデルを求めることが可能です
AutoCAD LT2000i
 空間デザイン演習資料 ( 第 10 回 -14 回 ) 課題 国土地理院の基盤地図情報数値標高モデルから東北地方の任意地域の標高データと航空写真を取得し, 以下の設計条件を満足する道路設計を行いなさい. また, 走行シミュレーションのアニメーションを作成しなさい.(Civil3D の新規 国土交通省仕様 100m 測点.dwt を用いて設計をすること ) 注意 : これまでの配布資料を忘れずに持参しなさい.
空間デザイン演習資料 ( 第 10 回 -14 回 ) 課題 国土地理院の基盤地図情報数値標高モデルから東北地方の任意地域の標高データと航空写真を取得し, 以下の設計条件を満足する道路設計を行いなさい. また, 走行シミュレーションのアニメーションを作成しなさい.(Civil3D の新規 国土交通省仕様 100m 測点.dwt を用いて設計をすること ) 注意 : これまでの配布資料を忘れずに持参しなさい.
名古屋大学.indd
 車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
슬라이드 1
 SoilWorks for FLIP 主な機能特徴 1 / 13 SoilWorks for FLIP Pre-Processing 1. CADのような形状作成 修正機能 AutoCAD感覚の使いやすいモデリングや修正機能 1 CADで形状をレイヤー整理したりDXFに変換しなくても Ctrl+C でコピーしてSoilWorks上で Ctrl+V で読込む 2. AutoCAD同様のコマンドキー入力による形状作成
SoilWorks for FLIP 主な機能特徴 1 / 13 SoilWorks for FLIP Pre-Processing 1. CADのような形状作成 修正機能 AutoCAD感覚の使いやすいモデリングや修正機能 1 CADで形状をレイヤー整理したりDXFに変換しなくても Ctrl+C でコピーしてSoilWorks上で Ctrl+V で読込む 2. AutoCAD同様のコマンドキー入力による形状作成
(a) 2 (b) 1 (Controller) 3 3 LIDAR [13]LIDAR GNSS/INS [14] [15] 2 1(a) 1(b) 2. 2 End-to-End LIDAR End-to- End [9] [10] [11]End-to-End 3. End-to-End 1
![(a) 2 (b) 1 (Controller) 3 3 LIDAR [13]LIDAR GNSS/INS [14] [15] 2 1(a) 1(b) 2. 2 End-to-End LIDAR End-to- End [9] [10] [11]End-to-End 3. End-to-End 1](/thumbs/91/105849651.jpg "(a) 2 (b) 1 (Controller) 3 3 LIDAR [13]LIDAR GNSS/INS [14] [15] 2 1(a) 1(b) 2. 2 End-to-End LIDAR End-to- End [9] [10] [11]End-to-End 3. End-to-End 1") 一般社団法人 電子情報通信学会 THE INSTITUTE OF ELECTRONICS, 社団法人 電子情報通信学会 INFORMATION AND COMMUNICATION ENGINEERS 信学技報 IEICE Technical Report PRMU2017-77(2017-10) 信学技報 TECHNICAL REPORT OF IEICE. THE INSTITUTE OF ELECTRONICS,
一般社団法人 電子情報通信学会 THE INSTITUTE OF ELECTRONICS, 社団法人 電子情報通信学会 INFORMATION AND COMMUNICATION ENGINEERS 信学技報 IEICE Technical Report PRMU2017-77(2017-10) 信学技報 TECHNICAL REPORT OF IEICE. THE INSTITUTE OF ELECTRONICS,
選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し
 を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し") 選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
ユーザ デバイス プロファイルの ファイル形式
 CHAPTER 34 CSV データファイルの作成にテキストエディタを使用する場合 デバイスフィールドと回線フィールドを CSV データファイル内で識別するファイル形式を使用する必要があります このファイル形式には次のオプションがあります Default User Device Profile: ユーザデバイスプロファイルのデバイスフィールドと回線フィールドの事前決定済みの組み合せを含む Simple
CHAPTER 34 CSV データファイルの作成にテキストエディタを使用する場合 デバイスフィールドと回線フィールドを CSV データファイル内で識別するファイル形式を使用する必要があります このファイル形式には次のオプションがあります Default User Device Profile: ユーザデバイスプロファイルのデバイスフィールドと回線フィールドの事前決定済みの組み合せを含む Simple
SNC-HM662 EdgeStorage manual J
 ネットワークカメラ SNC-HM662 Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ 目次 1. Edge Strage 機能について 1-1. Edge Storage 機能とは 1-2. Edge Storage 機能を使用する上での注意点 1-3. 使用可能なメモリーカード 2. Edge Storage 機能使用時の推奨設定 3. Edge Storage
ネットワークカメラ SNC-HM662 Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ 目次 1. Edge Strage 機能について 1-1. Edge Storage 機能とは 1-2. Edge Storage 機能を使用する上での注意点 1-3. 使用可能なメモリーカード 2. Edge Storage 機能使用時の推奨設定 3. Edge Storage
Microsoft Word - Meta70_Preferences.doc
 Image Windows Preferences Edit, Preferences MetaMorph, MetaVue Image Windows Preferences Edit, Preferences Image Windows Preferences 1. Windows Image Placement: Acquire Overlay at Top Left Corner: 1 Acquire
Image Windows Preferences Edit, Preferences MetaMorph, MetaVue Image Windows Preferences Edit, Preferences Image Windows Preferences 1. Windows Image Placement: Acquire Overlay at Top Left Corner: 1 Acquire
MATLAB® における並列・分散コンピューティング ~ Parallel Computing Toolbox™ & MATLAB Distributed Computing Server™ ~
 MATLAB における並列 分散コンピューティング ~ Parallel Computing Toolbox & MATLAB Distributed Computing Server ~ MathWorks Japan Application Engineering Group Takashi Yoshida 2016 The MathWorks, Inc. 1 System Configuration
MATLAB における並列 分散コンピューティング ~ Parallel Computing Toolbox & MATLAB Distributed Computing Server ~ MathWorks Japan Application Engineering Group Takashi Yoshida 2016 The MathWorks, Inc. 1 System Configuration
スライド 1
 Graphics with Processing 2008-12 モデリング http://vilab.org 塩澤秀和 1 12.1 3D モデリング モデリング 3Dモデルを作り上げること オブジェクト座標系で基本図形やポリゴンを組み合わせる テクスチャ x テクスチャ z y 2 12.2 オブジェクトの関数例 複雑なオブジェクトは, 大きさ 1 を目安としてモデリングし, 関数にしておくと利用しやすい
Graphics with Processing 2008-12 モデリング http://vilab.org 塩澤秀和 1 12.1 3D モデリング モデリング 3Dモデルを作り上げること オブジェクト座標系で基本図形やポリゴンを組み合わせる テクスチャ x テクスチャ z y 2 12.2 オブジェクトの関数例 複雑なオブジェクトは, 大きさ 1 を目安としてモデリングし, 関数にしておくと利用しやすい
Rの基本操作
 Microsoft Azure 高校生のための Azure Machine Learning By M. Takezawa 機械学習 (Machine Learning) とは 機械学習とは 機械にデータを学習させ データに潜むパターンや特性を発見し予測させることです Microsoft Azure Machine Learning とは Microsoft 社が提供する Azure の機能の一つであり
Microsoft Azure 高校生のための Azure Machine Learning By M. Takezawa 機械学習 (Machine Learning) とは 機械学習とは 機械にデータを学習させ データに潜むパターンや特性を発見し予測させることです Microsoft Azure Machine Learning とは Microsoft 社が提供する Azure の機能の一つであり
Presentation Title
 モデルベースデザインではじめる自律型アームロボットの開発 導入 アプリケーションエンジニアリング部小林昇洋 2015 The MathWorks, Inc. 1 本セッションでお伝えしたいこと 自律ロボットシステムの開発のキーポイント : 1. マルチドメインシミュレーション 2. 複雑な開発要素をトータルでサポートする開発環境 3. モデルベースデザイン 2 自律ロボットシステムの開発における課題
モデルベースデザインではじめる自律型アームロボットの開発 導入 アプリケーションエンジニアリング部小林昇洋 2015 The MathWorks, Inc. 1 本セッションでお伝えしたいこと 自律ロボットシステムの開発のキーポイント : 1. マルチドメインシミュレーション 2. 複雑な開発要素をトータルでサポートする開発環境 3. モデルベースデザイン 2 自律ロボットシステムの開発における課題
PowerPoint プレゼンテーション
 20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
Simulinkモデル開発における工夫事例
 MBD 中部コンファレンス PMA2:MATLAB 開発 Simulink モデル開発における 工夫事例 2014 年 12 月 18 日オムロンオートモーティブエレクトロニクス株式会社開発統括室ボディコントロールシステム開発部町井紀善 はじめに Simulink の導入 開発手法 環境をそれぞれの事情 ( 会社 部署 個人 開発アイテム ビジネスモデル 等 ) に合せ込むことで効率化を実現します
MBD 中部コンファレンス PMA2:MATLAB 開発 Simulink モデル開発における 工夫事例 2014 年 12 月 18 日オムロンオートモーティブエレクトロニクス株式会社開発統括室ボディコントロールシステム開発部町井紀善 はじめに Simulink の導入 開発手法 環境をそれぞれの事情 ( 会社 部署 個人 開発アイテム ビジネスモデル 等 ) に合せ込むことで効率化を実現します
法政大学理工学部創生科学科小林一行研究室 Gerox(c) 2014, 北陽電機さんから 3D LIDAR(YVT-X001) を試用する機会をいただいたため そのお礼と して MATLAB を使って 3D LIDAR のデータ取得プログラムを公開す
 2014, 北陽電機さんから 3D LIDAR(YVT-X001) を試用する機会をいただいたため そのお礼と して MATLAB を使って 3D LIDAR のデータ取得プログラムを公開す") 北陽電機さんから 3D LIDAR(YVT-X001) を試用する機会をいただいたため そのお礼と して MATLAB を使って 3D LIDAR のデータ取得プログラムを公開する MATLAB を使って 3D LIDAR のデータを取得するには? 3D 測域センサは 3 次元データを扱うため 高速なデータ通信が不可欠である そのため USB 経由ではなく Ethernet 経由でのデータのやり取りを行う
北陽電機さんから 3D LIDAR(YVT-X001) を試用する機会をいただいたため そのお礼と して MATLAB を使って 3D LIDAR のデータ取得プログラムを公開する MATLAB を使って 3D LIDAR のデータを取得するには? 3D 測域センサは 3 次元データを扱うため 高速なデータ通信が不可欠である そのため USB 経由ではなく Ethernet 経由でのデータのやり取りを行う
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装
 本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
XAML Do-It-Yourself シリーズ 第 12 回 3D グラフィックス -1-
 XAML Do-It-Yourself シリーズ 第 12 回 3D グラフィックス -1- XAML Do-It-Yourself 第 12 回 3D グラフィックス XAML Do-It-Yourself 第 12 回は 3D グラフィックスについて学習します これまでアプリケーション で 3D グラフィックスを扱うには DirectX のコンポーネントを使用する必要がありましたが WPF (XAML)
XAML Do-It-Yourself シリーズ 第 12 回 3D グラフィックス -1- XAML Do-It-Yourself 第 12 回 3D グラフィックス XAML Do-It-Yourself 第 12 回は 3D グラフィックスについて学習します これまでアプリケーション で 3D グラフィックスを扱うには DirectX のコンポーネントを使用する必要がありましたが WPF (XAML)
Presentation Title
 Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場
 をお使いになる 場") ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場合は まず Firmware を Ver1.9.2 以上にアップデートしてください 目次 1. Edge
ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場合は まず Firmware を Ver1.9.2 以上にアップデートしてください 目次 1. Edge
Microsoft Word - SKY操作マニュアル.doc
 2. 使用方法 SKY の使用方法について説明する前に 画面構成について説明する SKY は図 c-2 に示すようにシングルインターフェースドキュメント (SDI) で作成しており 図 3 に示すメニュバーに機能拡張処理を実行可能な項目を作成している また メニューの構成を図 4 に示すとおり 1ファイル 2イメージ 3 設定 4フィルタの4つの大きな項目に分かれる 1 図 2 SKY のメイン画面
2. 使用方法 SKY の使用方法について説明する前に 画面構成について説明する SKY は図 c-2 に示すようにシングルインターフェースドキュメント (SDI) で作成しており 図 3 に示すメニュバーに機能拡張処理を実行可能な項目を作成している また メニューの構成を図 4 に示すとおり 1ファイル 2イメージ 3 設定 4フィルタの4つの大きな項目に分かれる 1 図 2 SKY のメイン画面
Android Layout SDK プログラミング マニュアル
 プログラミングマニュアル Version 1.3.0 用 更新履歴 年月日 バージョン 履歴 2014.09.08 1.2.0.0 新規 (Layout Utilities ユーザーズ ガイド ) 2016.08.16 1.3.0.0 モバイル端末用レイアウトで直線部品と矩形部品に対応 モバイル端末用レイアウトファイルを CLFX から XML へ変更 Layout Print Engine から
プログラミングマニュアル Version 1.3.0 用 更新履歴 年月日 バージョン 履歴 2014.09.08 1.2.0.0 新規 (Layout Utilities ユーザーズ ガイド ) 2016.08.16 1.3.0.0 モバイル端末用レイアウトで直線部品と矩形部品に対応 モバイル端末用レイアウトファイルを CLFX から XML へ変更 Layout Print Engine から
Presentation Title
 画像のためのディープラーニング ( 深層学習 ) ~ CNN/R-CNN による物体の認識と検出 ~ MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 太田英司 2017 The MathWorks, Inc. 1 機械学習 Machine Learning 人間が自然に行っている学習能力と同様の機能をコンピュータで実現しようとする技術 手法 ( ) イヌ
画像のためのディープラーニング ( 深層学習 ) ~ CNN/R-CNN による物体の認識と検出 ~ MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 太田英司 2017 The MathWorks, Inc. 1 機械学習 Machine Learning 人間が自然に行っている学習能力と同様の機能をコンピュータで実現しようとする技術 手法 ( ) イヌ
WHITE PAPER RNN
 WHITE PAPER RNN ii 1... 1 2 RNN?... 1 2.1 ARIMA... 1 2.2... 2 2.3 RNN Recurrent Neural Network... 3 3 RNN... 5 3.1 RNN... 6 3.2 RNN... 6 3.3 RNN... 7 4 SAS Viya RNN... 8 4.1... 9 4.2... 11 4.3... 15 5...
WHITE PAPER RNN ii 1... 1 2 RNN?... 1 2.1 ARIMA... 1 2.2... 2 2.3 RNN Recurrent Neural Network... 3 3 RNN... 5 3.1 RNN... 6 3.2 RNN... 6 3.3 RNN... 7 4 SAS Viya RNN... 8 4.1... 9 4.2... 11 4.3... 15 5...
ProVisionaire Control V3.0セットアップガイド
 ProVisionaire Control V3 1 Manual Development Group 2018 Yamaha Corporation JA 2 3 4 5 NOTE 6 7 8 9 q w e r t r t y u y q w u e 10 3. NOTE 1. 2. 11 4. NOTE 5. Tips 12 2. 1. 13 3. 4. Tips 14 5. 1. 2. 3.
ProVisionaire Control V3 1 Manual Development Group 2018 Yamaha Corporation JA 2 3 4 5 NOTE 6 7 8 9 q w e r t r t y u y q w u e 10 3. NOTE 1. 2. 11 4. NOTE 5. Tips 12 2. 1. 13 3. 4. Tips 14 5. 1. 2. 3.
Signal Processing Toolbox
 Signal Processing Toolbox 信号処理 解析およびアルゴリズム開発の実行 Signal Processing Toolbox は アナログおよびデジタル信号処理 (DSP) の業界標準アルゴリズムを提供 します この Toolbox を使用すると 時間領域および周波数領域での信号の可視化 スペクトル解析 における FFT の計算 FIR および IIR フィルターの設計 コンボリューション
Signal Processing Toolbox 信号処理 解析およびアルゴリズム開発の実行 Signal Processing Toolbox は アナログおよびデジタル信号処理 (DSP) の業界標準アルゴリズムを提供 します この Toolbox を使用すると 時間領域および周波数領域での信号の可視化 スペクトル解析 における FFT の計算 FIR および IIR フィルターの設計 コンボリューション
Managing and Sharing MATLAB Code
 MATLAB 入門 ~ 開発向けプログラミング編 ~ MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 大開孝文 2015 The MathWorks, Inc. 1 プログラミング言語としての MATLAB 2014 年 7 月 IEEE Spectrum による プログラミング言語の人気調査 (12 種類の項目での結果 ) 結果 : MATLAB が
MATLAB 入門 ~ 開発向けプログラミング編 ~ MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 大開孝文 2015 The MathWorks, Inc. 1 プログラミング言語としての MATLAB 2014 年 7 月 IEEE Spectrum による プログラミング言語の人気調査 (12 種類の項目での結果 ) 結果 : MATLAB が
ストリームを用いたコンカレントカーネルプログラミングと最適化 エヌビディアジャパン CUDAエンジニア森野慎也 GTC Japan 2014
 ストリームを用いたコンカレントカーネルプログラミングと最適化 エヌビディアジャパン CUDAエンジニア森野慎也 GTC Japan 2014 コンカレントな処理の実行 システム内部の複数の処理を 平行に実行する CPU GPU メモリ転送 カーネル実行 複数のカーネル間 ストリーム GPU 上の処理キュー カーネル実行 メモリ転送の並列性 実行順序 DEFAULT STREAM Stream : GPU
ストリームを用いたコンカレントカーネルプログラミングと最適化 エヌビディアジャパン CUDAエンジニア森野慎也 GTC Japan 2014 コンカレントな処理の実行 システム内部の複数の処理を 平行に実行する CPU GPU メモリ転送 カーネル実行 複数のカーネル間 ストリーム GPU 上の処理キュー カーネル実行 メモリ転送の並列性 実行順序 DEFAULT STREAM Stream : GPU
Gatlin(8) 図 1 ガトリン選手のランニングフォーム Gatlin(7) 解析の特殊な事情このビデオ画像からフレームごとの静止画像を取り出して保存してあるハードディスクから 今回解析するための小画像を切り出し ランニングフォーム解析ソフト runa.exe に取り込んで 座標を読み込み この
 図 1 ガトリン選手のランニングフォーム Gatlin(7) 解析の特殊な事情このビデオ画像からフレームごとの静止画像を取り出して保存してあるハードディスクから 今回解析するための小画像を切り出し ランニングフォーム解析ソフト runa.exe に取り込んで 座標を読み込み この") 短距離ランニングフォーム解析 (20) 2005 年ガトリン選手の詳細重心解析 黒月樹人 (KULOTSUKI Kinohito @ 9621 ANALYSIS) 2005 年 9 月のガトリン選手 2005 年の 9 月に日本で行われた 100m レースにガトリン選手は出場しています 記録は 10 秒 2 くらいだったでしょうか もちろん優勝しています このときのレースがテレビ放映されたので その画面をビデオで撮影しました
短距離ランニングフォーム解析 (20) 2005 年ガトリン選手の詳細重心解析 黒月樹人 (KULOTSUKI Kinohito @ 9621 ANALYSIS) 2005 年 9 月のガトリン選手 2005 年の 9 月に日本で行われた 100m レースにガトリン選手は出場しています 記録は 10 秒 2 くらいだったでしょうか もちろん優勝しています このときのレースがテレビ放映されたので その画面をビデオで撮影しました
 直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
PowerPoint プレゼンテーション
 非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1
 における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1") 資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
PowerPoint プレゼンテーション
 1 02 グラフゖックで簡単な図形を描く図形描画プログラム 1 今回作成するゕプリケーションの概要 ボタンをクリックすると図形を描くプログラム 行われる動作 [1] ボタンをクリック [2] そのボタンに対する図形を描く これを使用者とコンピュータの関係で描くと [ 使用者 コンピュータ ] ボタンをクリック [ 使用者 コンピュータ ] 図形を描画して見せる 使用者がコンピュータにすること ボタンをクリック
1 02 グラフゖックで簡単な図形を描く図形描画プログラム 1 今回作成するゕプリケーションの概要 ボタンをクリックすると図形を描くプログラム 行われる動作 [1] ボタンをクリック [2] そのボタンに対する図形を描く これを使用者とコンピュータの関係で描くと [ 使用者 コンピュータ ] ボタンをクリック [ 使用者 コンピュータ ] 図形を描画して見せる 使用者がコンピュータにすること ボタンをクリック
ゲートウェイのファイル形式
 この章では Cisco Unified Communications Manager 一括管理 BAT を使用して シスコのゲー トウェイのファイル形式を Cisco Unified Communications Manager データベースに一括して設定す る方法について説明します の検索, 1 ページ の設定, 2 ページ ファイル形式と CSV データ ファイルの関連付け, 5 ページ の検索
この章では Cisco Unified Communications Manager 一括管理 BAT を使用して シスコのゲー トウェイのファイル形式を Cisco Unified Communications Manager データベースに一括して設定す る方法について説明します の検索, 1 ページ の設定, 2 ページ ファイル形式と CSV データ ファイルの関連付け, 5 ページ の検索
intra-mart Accel Platform — IM-BloomMaker プログラミングガイド 初版
 Copyright 2019 NTT DATA INTRAMART CORPORATION 1 Top 目次 1. 改訂情報 2. はじめに 2.1. 本書の目的 2.2. 対象読者 2.3. サンプルコードについて 2.4. 本書の構成 3. 前処理プログラム 3.1. 前処理を実装する 3.1.1. 前処理の実装方式 3.1.2. 前処理の実行順序と引数 3.1.3. リクエストパラメータの解析
Copyright 2019 NTT DATA INTRAMART CORPORATION 1 Top 目次 1. 改訂情報 2. はじめに 2.1. 本書の目的 2.2. 対象読者 2.3. サンプルコードについて 2.4. 本書の構成 3. 前処理プログラム 3.1. 前処理を実装する 3.1.1. 前処理の実装方式 3.1.2. 前処理の実行順序と引数 3.1.3. リクエストパラメータの解析
CG
 Grahics with Processig 2016-05 複雑な図形の描画 htt://vilab.org 塩澤秀和 1 2006-2016 H. SHIOZAWA htt://vilab.org 5.1 頂点列による図形描画 複雑な図形描画 begishae( 図形 ) 頂点列モードの開始 図形が空欄なら頂点を線で結ぶ ( 折れ線か多角形になる ) その他, 下記図形を指定できる POINTS,
Grahics with Processig 2016-05 複雑な図形の描画 htt://vilab.org 塩澤秀和 1 2006-2016 H. SHIOZAWA htt://vilab.org 5.1 頂点列による図形描画 複雑な図形描画 begishae( 図形 ) 頂点列モードの開始 図形が空欄なら頂点を線で結ぶ ( 折れ線か多角形になる ) その他, 下記図形を指定できる POINTS,
SUALAB INTRODUCTION SUALAB Solution SUALAB は 人工知能 ( ディープラーニング ) による画像解析技術を通して 迅速 正確 そして使いやすいマシンビジョン用のディープラーニングソフトウェアライブラリーである SuaKIT を提供します これは 従来のマシン
 による画像解析技術を通して 迅速 正確 そして使いやすいマシンビジョン用のディープラーニングソフトウェアライブラリーである SuaKIT を提供します これは 従来のマシン") SuaKIT suɑ kít Deep learning S/WLibrary for MachineVision SuaKIT は ディスプレイ 太陽光 PCB 半導体など 様々な分野で使用できる メーカー独自のディープラーニングのマシンビジョンソフトウェアライブラリーです SuaKIT は 様々な産業分野から実際に取得された画像データに基づいて開発されました Samsung LG SK Hanwha
SuaKIT suɑ kít Deep learning S/WLibrary for MachineVision SuaKIT は ディスプレイ 太陽光 PCB 半導体など 様々な分野で使用できる メーカー独自のディープラーニングのマシンビジョンソフトウェアライブラリーです SuaKIT は 様々な産業分野から実際に取得された画像データに基づいて開発されました Samsung LG SK Hanwha