スライド 1
|
|
|
- さゆり ふじがわ
- 7 years ago
- Views:
Transcription
1 航空宇宙機設計論第 13 回 (2018/7/12) 空力設計 ver. 2018/07/12 空力設計 形状と揚力 抗力特性の関係 Space Transportation Systems Engineering Laboratory, Kyushu Univ.2018
2 空力設計 抵抗の分類
3 空力設計 ~ Drag Polar Drag Polar
4 空力設計 ~ Lα (1/4) 揚力傾斜
5 空力設計 ~ Lα (2/4) 揚力傾斜に対するマッハ数の影響
6 空力設計 ~ Lα (3/4) 亜音速の揚力傾斜の推算式 L A 2 2A 1 tan 2 max_ t 2 S exposed S ref ( F) 2 1 M 2 l 2 Λmax_t : 最大翼厚点の後退角 η : l が不明の場合は 0.95 と近似 F : 胴体揚力ファクタ, F 1.07(1 d / b) 2 アスペクト比の補正 : Endplate : A Winglet : A effective effective A(1 1.9h / b) 1.2A
7 空力設計 ~ Lα (4/4) 超音速における主翼の揚力傾斜の推算式 ( 超音速前縁の場合 ) _ L Wing 4 胴体が結合している場合は L _ WB L _ Wing S exposed S ref ( F) 遷音速 : 適切な推算法がない 亜音速と超音速の内挿
8 空力設計 ~ Lmax (1/7) 最大揚力係数 (LEAN): 中程度の後退角と大前縁半径 高アスペクト比の翼 翼型の特性に依存 0.9 cos Lmax l max 大後退角 小前縁半径 低アスペクト比の場合 前縁渦により最大揚力は増加する
9 空力設計 ~ Lmax (2/7) 前縁形状の最大揚力に対する影響 Leading edge sharpness parameter Dy : 0.15% と 6% の翼型上面座標の差
10 空力設計 ~ Lmax (3/7) 高アスペクト比翼の最大揚力係数 Lmax l max Lmax l max D Lmax l max :maximum lift coefficient at M 0.2
11 空力設計 ~ Lmax (4/7) 高アスペクト比翼の最大揚力を与える迎角の推算式 L max Lmax L 0 D L max
12 空力設計 ~ Lmax (5/7) 3 低アスペクト比 A の場合 ; ( 1)(cos ) 1 LE 最大揚力係数の推算 ; 1 2 Lmax ( Lmax ) base D Lmax
13 空力設計 ~ Lmax (6/7) 低アスペクト比の場合の最大揚力係数を与える迎角の推算 ; ) base Lmax ( D Lmax Lmax Acos LE [1 (2) 2 ]
14 空力設計 ~ Lmax (7/7) 遷音速 超音速の場合の最大揚力は 利用出来る最大揚力は 構造的な限界で制限される 高いマッハ数でも M=0.6 の Lmax が維持されると仮定 一般に Lmax は遷音速域では増加し 超音速域で低下する
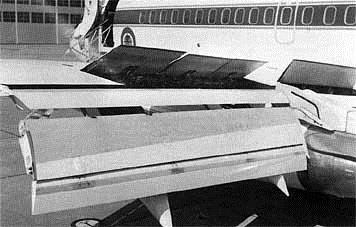
15 空力設計 ~ HLD (1/9) 高揚力装置 ( High Lift Devices )
")


16 空力設計 ~ HLD (2/9) Flap???
17 高揚力装置による揚力変化 空力設計 ~ HLD (3/9)




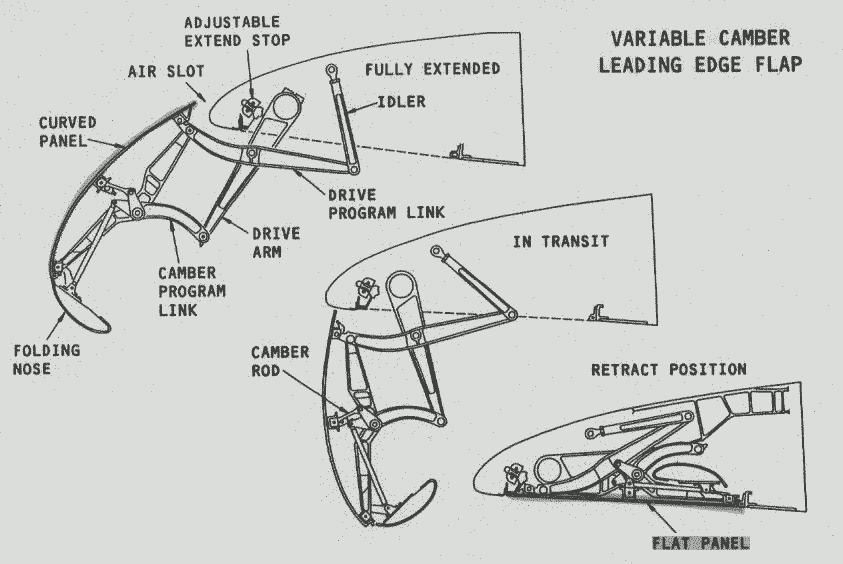
18 前縁デバイス 空力設計 ~ HLD (4/9)??
")

19 空力設計 ~ HLD (5/9) Krueger Flap
20 空力設計 ~ HLD (6/9) 高揚力装置 ( 前縁デバイス ) による揚力変化
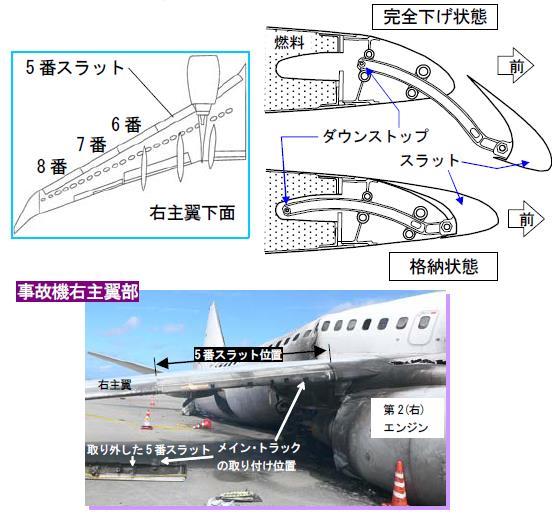
21 B の事故 空力設計 ~ HLD (7/9)


22 ストレーキによる揚力変化 空力設計 ~ HLD (8/9)
23 空力設計 ~ HLD (9/9) HLD による最大揚力係数増加 零揚力迎角の推算 D D Lmax 0L D ( D 0L l max ) S S airfoil flapped ref S S flapped ref cos H.L. cos H.L. H.L. : HLDヒンジライン 0L : 零揚力状態 離陸フラップでは表値の 60~80% とする
24 空力設計 ~ D0 (1/15) 有害抵抗 (Parasite Drag, D0 ) の推算 1 Equivalent Skin-Friction Method 摩擦抵抗と圧力抵抗を 等価表面摩擦係数 ( fe ) として取り扱う
25 空力設計 ~ D0 (2/15) 有害抵抗 (Parasite Drag, D0 ) の推算 2 omponent Buildup Method 構成要素 ( component : c ) 毎に 摩擦抵抗と形状ファクタとして推算し 合計することで全抵抗を推算 D0 subsonic c fc FF Q S S c ref c wetc D misc D L&P f : 表面摩擦係数 FF : 形状係数 ( 粘性剥離による圧力抵抗 ) Q : 空力干渉ファクタ D misc D L&P : フラップ 降着装置等による抵抗 : 気流漏洩や突起による抵抗
26 平板摩擦抵抗係数 層流域 ; 乱流域 ; 空力設計 ~ D0 (3/15) f f (log Re Re) ( M ) 表面が粗い場合は Re 数を修正する ; cut-off Re 数 Subsonic R cutoff cutoff 38.21( l / k) Transonic or Supersonic R 44.62( l / k) M 1.16 実際の Re 数と cut-off Re 数のうち 小さい方を f の式に用いる
27 平板摩擦抵抗係数 層流域 ; 乱流域 ; 空力設計 ~ D0 (3/15) f f (log Re Re) ( M ) f f_laminar f_turbulent E+04 1.E+05 1.E+06 1.E+07 1.E+08 1.E+09 1.E+10 Re
28 空力設計 ~ D0 (4/15) 形状係数 ( Form Factor ) の推算式 Wing, Tail, Strut, Pylon: FF ( x / c) m t c 100 t c M 0.18 (cos m ) 0.28 ラダーやエレベータがヒンジ結合 10% 増 Fuselage, Smooth canopy: 60 FF 1 3 f Nacelle, FF f f 400 四角形胴体 40% 増とする Smooth External store: f l d l ( 4 / ) A max
29 空力設計 ~ D0 (5/15) Boundary Layer Diverter Double Wedge : FF 1 ( d Single Wedge : FF 1 (2d / l) / l)
")


30 空力設計 ~ D0 (5/15)
31 空力設計 ~ D0 (6/15) 空力干渉ファクタ (Q) の概算値 : 形状 Q の値 ナセルが装着 1.5 ナセルがその直径程度離れている場合 1.3 直径以上離れている場合 1.0 翼端にミサイルを装着 1.25 翼胴結合部 フィレット有り 1.0 フィレット無し 1.1~1.4 尾翼 V 尾翼 1.03 H 尾翼 1.08 通常尾翼 1.04~1.05 D0 subsonic c fc FF Q S S c ref c wetc Dmisc DL&P


32 翼胴結合部フィレット 空力設計 ~ D0 (6 /15)
33 空力設計 ~ D0 (7/15) その他の抵抗 ( Dmisc 及び DL&P ) 1 外部搭載物 (1)
34 1 外部搭載物 (2) 空力設計 ~ D0 (15/15)
35 空力設計 ~ D0 (9/15) 2 後胴はね上げ (upsweep) 形状 D 2.5 / qupsweep 3. 83u Amax
36 空力設計 ~ D0 (10/15) 3 降着装置 空力干渉分として 1.2 倍とする 格納式の扉開状態では さらに 1.07 倍する
37 空力設計 ~ D0 (11/15) 4 フラップ D D0flap flap span wing span flap 5 スピードブレーキの D/q 胴体装着型 : スピードブレーキ前面面積 1.0 主翼装着型 : スピードブレーキ前面面積 1.6
38 空力設計 ~ D0 (12/15) 6 ベース部 Subsonic Supersonic : : D / q D / q base base ( M ( M 0.161) 3.84) A 2 base 2 Abase 7 旅客機や軽飛行機のキャノピ 胴体に連続的な場合 : D/q= 風防窓前面面積 0.07 角部がある場合 : D/q= 風防窓前面面積 0.15
39 空力設計 ~ D0 (13/15) 8 気流漏洩 突起物 ( D L&P ) ジェット輸送機 爆撃機 : 有害抵抗の 2 ~ 5 % プロペラ機 : 5 ~ 10 % 従来型戦闘機 : 10 ~ 15 % 新型戦闘機 : 5 ~ 10 % 可変後退翼 : さらに 3 % ( ギャップや段差がある場合 ) 9プロペラ エンジン故障時 フェザー状態のプロペラ : D 0.1 ( 全ブレード面積基準 ) 固定ピッチプロペラ : D 0.8 ( 同 ) ジェットエンジン : D 0.3 ( 流入前面面積基準 ) 全機の抵抗係数にするには 基準面積の換算を行う
40 空力設計 ~ D0 (14/15) 10 超音速有害抵抗 摩擦係数に形状ファクタと干渉効果を含まない 造波抵抗が追加 D supersonic fc 0 L& P S ref S wetc Dmisc D Dwave
41 造波抵抗 空力設計 ~ D0 (15/15) LEdeg D/q EWD ( M 1.2)0.571 ( D / q Sears Haack wave ) E WD : empirical wave-drag efficiency factor 円滑な機体 : E WD = 1.2 典型的な超音速戦闘機 SST : E WD = 1.4 ~ 2.0 円滑でない体積分布 : E WD = 2.0 ~ 3.0 Sears-Haack bodyの抵抗 2 9 Amax ( D / q) Sears Haack 2 l
42 抵抗発散マッハ数 空力設計 ~ MDD (1/5)
43 遷音速の抵抗発散 空力設計 ~ MDD (2/5)










44 遷音速の抵抗発散
45 空力設計 ~ MDD (3/5) 主翼の抵抗発散マッハ数の推算 M DD M DD L0 LF DD 0.05 Ldesign
46 空力設計 ~ MDD (4/5) 胴体の抵抗発散マッハ数の推算
47 抵抗発散マッハ数の推定 空力設計 ~ MDD (5/5) A ( M=1.2 ) : 造波抵抗の推算式から求める B ( M=1.05 ) : A 点と同じ抵抗値とする ( M=1.0 ) : M=1.05の1/2の抵抗値とする D ( M DD ) : M DD の推算式からM DD を求め Dw =0.002とする E ( M cr ) : M DD より0.08 低いマッハ数とする
48 誘導抵抗の推算 空力設計 ~ Induced drag (1/8) 1Oswald Span Efficiency Method Straight D Swept - Wing 1 K Ae - Wing 2 D0 KL Aircraft : Aircraft : e 1.78( A e 4.61( A ( LE deg) ) 0.64 )(cos LE ) 超音速における簡易式 ; K A( M 2 1)cos LE 2 4A M 1 2
49 空力設計 ~ Induced drag (1/8) Straight - Wing Aircraft : e 1.78( A Swept - Wing Aircraft : e 4.61( A ( LE deg) ) 0.64 )(cos LE ) D 1 K Ae 2 D0 KL Straight - Wing Aircraft
50 空力設計 ~ Induced drag (2/8) 複葉機の場合 ; 干渉係数の導入 e 2 (1 r 2 2 r ) r 2 2 : 短い主翼のスパン / 長い主翼のスパン r : 短い主翼の揚力 / 長い主翼の揚力
51 空力設計 ~ Induced drag (3/8) 2Leading Edge Suction Method 翼厚の大きい翼の場合 前縁付近の負圧により Leading edge suction が発生する e 1.0 K A
52 空力設計 ~ Induced drag (4/8) 平板の場合 この suction は発生しない L N cos D i Di N sin L tan L tan 迎角が小であると仮定すると Di L よって K Di 0 K 2 L L 2 L L L 1 L
53 空力設計 ~ Induced drag (5/8) K の推定 K 実際の翼は Leading edge suction が 0~100% の間をとる K SK ( 1 S K 100 ) 0
54 L Design L S 空力設計 ~ Induced drag (6/8) S の推定 : 設計揚力係数と実際の揚力係数から推算 D A S N S S A e L L 1 1 ) )(1 / ( 1
55 K の推算例 空力設計 ~ Induced drag (7/8)
56 空力設計 ~ Induced drag (8/8) 地面効果 ; 地面から h の高さにある翼の場合 K effective K 33( h / b) 1 33( h / b) トリム抵抗 ; 水平尾翼が発生する下向き揚力による誘導抵抗増分を考慮 フラップによる抵抗 ; フラップが発生する揚力増加による誘導抵抗増分を考慮 D 2 2 Di k f ( DL flap ) cos k /4 f = 0.14 (full span flap) = 0.28 (half span flap)



57 Ref. 翼型のデータなど Theory of wing sections : NAA 翼型のデータ集


58 Ref. 翼型のデータなど Fluid-Dynamic Drag Fluid -Dynamic Lift 様々な形状の抵抗や揚力に関するデータがまとめてある

59 Ref. 翼型のデータなど UIU Airfoil Data Site ( 翼型の座標データや航空機で使用されている翼型のリストなど

60 Ref. 翼型のデータなど Airfoil Investigation Database ( UIU のデータが元になっているが ちょっと便利
スライド 1
 航空宇宙機設計論第 6 回 (2018/05/21) 6. 初期サイジング ver. 2018/05/28 初期サイジング : 第 2 回の講義の方法を 少し詳しく見直し ラバーエンジン/ 固定エンジン 形状 操舵面のサイジング サイジング例 Space Transportation Systems Engineering Laboratory, Kyushu Univ.2018 6.1 ラバーエンジンによるサイジング
航空宇宙機設計論第 6 回 (2018/05/21) 6. 初期サイジング ver. 2018/05/28 初期サイジング : 第 2 回の講義の方法を 少し詳しく見直し ラバーエンジン/ 固定エンジン 形状 操舵面のサイジング サイジング例 Space Transportation Systems Engineering Laboratory, Kyushu Univ.2018 6.1 ラバーエンジンによるサイジング
スライド 1
 Tokyo Univesity of Agicultue and Technology パラフォイル型飛翔体の飛行安定に関する研究 15.1.11 (Fi) 金丸拓樹 ( 農工大 B4) 前川啓 ( 東海大 M) 森吉貴大 ( 農工大 M1) 山田和彦 (ISAS/JAXA) 東野伸一郎 ( 九大 ) 長崎秀史 ( 九大 ) 西田浩之 ( 農工大 ) 1/3 OUTIE 1. 背景, 目的. 安定評価の方法
Tokyo Univesity of Agicultue and Technology パラフォイル型飛翔体の飛行安定に関する研究 15.1.11 (Fi) 金丸拓樹 ( 農工大 B4) 前川啓 ( 東海大 M) 森吉貴大 ( 農工大 M1) 山田和彦 (ISAS/JAXA) 東野伸一郎 ( 九大 ) 長崎秀史 ( 九大 ) 西田浩之 ( 農工大 ) 1/3 OUTIE 1. 背景, 目的. 安定評価の方法
<4D F736F F D2089A182CC88C092E894F78C CC90848E5A2E646F63>
 横の安定微係数の推算. 垂直尾翼の効果横すべり角 に対し, 垂直尾翼と胴体から負の横力 Y と正のヨーイング モーメントN が発生する. 尾翼により発生する横力 Y = V S L ) r a) ) =- ) - s) + ) d ) S : 垂直尾翼面積 ) L a ) Ld 胴体により発生する横力 L La Ld r : 垂直尾翼揚力傾斜 : 方向舵変化に対する垂直尾翼揚力係数変化 s : サイドウォッシュ角
横の安定微係数の推算. 垂直尾翼の効果横すべり角 に対し, 垂直尾翼と胴体から負の横力 Y と正のヨーイング モーメントN が発生する. 尾翼により発生する横力 Y = V S L ) r a) ) =- ) - s) + ) d ) S : 垂直尾翼面積 ) L a ) Ld 胴体により発生する横力 L La Ld r : 垂直尾翼揚力傾斜 : 方向舵変化に対する垂直尾翼揚力係数変化 s : サイドウォッシュ角
First Aerodynamics Prediction Challenge (APC-I) 143 First Aerodynamics Prediction Challenge (APC-I) 2015/7/3 TAS MEGG3D 格子による解析 M = 0.847, α = M
 143 First Aerodynamics Prediction Challenge (APC-I) 2015/7/3 TAS MEGG3D 格子による解析 M = 0.847, α = M") First Aerodynamics Prediction Challenge (APC-I) 143 First Aerodynamics Prediction Challenge (APC-I) 2015/7/3 TAS MEGG3D 格子による解析 M = 0.847, α = -0.62 M = 0.847, α = 2.47 M = 0.847, α = 2.94 M = 0.847, α
First Aerodynamics Prediction Challenge (APC-I) 143 First Aerodynamics Prediction Challenge (APC-I) 2015/7/3 TAS MEGG3D 格子による解析 M = 0.847, α = -0.62 M = 0.847, α = 2.47 M = 0.847, α = 2.94 M = 0.847, α
第 42 回流体力学講演会 航空宇宙数値シミュレーション技術シンポジウム 2010 論文集 161 低レイノルズ数における矩形翼とデルタ翼の空力特性比較野々村拓 1, 小嶋亮次 2, 福本浩章 2, 大山聖 1, 藤井孝蔵 1 1. 宇宙航空研究開発機構宇宙科学研究所,2. 東京大学大学院 Comp
 第 42 回流体力学講演会 航空宇宙数値シミュレーション技術シンポジウム 2 論文集 6 低レイノルズ数における矩形翼とデルタ翼の空力特性比較野々村拓, 小嶋亮次 2, 福本浩章 2, 大山聖, 藤井孝蔵. 宇宙航空研究開発機構宇宙科学研究所,2. 東京大学大学院 Comparative Study of Aerodynamic Characteristics of Rectangular and
第 42 回流体力学講演会 航空宇宙数値シミュレーション技術シンポジウム 2 論文集 6 低レイノルズ数における矩形翼とデルタ翼の空力特性比較野々村拓, 小嶋亮次 2, 福本浩章 2, 大山聖, 藤井孝蔵. 宇宙航空研究開発機構宇宙科学研究所,2. 東京大学大学院 Comparative Study of Aerodynamic Characteristics of Rectangular and
 (1) 擁壁の設計 東京都 H=2.0m < 常時に関する計算 > 2000 PV w1 w2 w3 PH GL 350 1800 97 4 土の重量 16.0, コンクリートの重量 24.0 摩擦係数 0.30, 表面載荷 9.8 ( 土圧係数は直接入力による ) 安定計算用の土圧係数 0.500 壁体計算用の土圧係数 0.500 W1 = 12.6, W2 = 12.3, W3 = 78.1 PH
(1) 擁壁の設計 東京都 H=2.0m < 常時に関する計算 > 2000 PV w1 w2 w3 PH GL 350 1800 97 4 土の重量 16.0, コンクリートの重量 24.0 摩擦係数 0.30, 表面載荷 9.8 ( 土圧係数は直接入力による ) 安定計算用の土圧係数 0.500 壁体計算用の土圧係数 0.500 W1 = 12.6, W2 = 12.3, W3 = 78.1 PH


第 44 回流体力学講演会 / 航空宇宙数値シミュレーション技術シンポジウム 2012 論文集 79 次世代超音速旅客機の空力技術に関する研究動向吉田憲司宇宙航空研究開発機構 Review on Aerodynamic Research Activities of Next Generation S
 第 44 回流体力学講演会 / 航空宇宙数値シミュレーション技術シンポジウム 2012 論文集 79 次世代超音速旅客機の空力技術に関する研究動向吉田憲司宇宙航空研究開発機構 Review on Aerodynamic Research Activities of Next Generation SST by Kenji Yoshida ABSTRACT This is a review of aerodynamic
第 44 回流体力学講演会 / 航空宇宙数値シミュレーション技術シンポジウム 2012 論文集 79 次世代超音速旅客機の空力技術に関する研究動向吉田憲司宇宙航空研究開発機構 Review on Aerodynamic Research Activities of Next Generation SST by Kenji Yoshida ABSTRACT This is a review of aerodynamic
(Microsoft Word - \220\224\222l\203V\203\223\203|2007\207B\230_\225\266.doc)
") 高速 高迎角におけるデルタ翼のマッハ数効果 On Classification of High-Speed High-angle Flows Over Delta Wings -Mach number effect- 小川烈, 東京電機大学, 埼玉県比企郡鳩山町大字石坂, E-mail: [email protected] 藤井孝藏, ISAS/JAXA, 神奈川県相模原市由野台
高速 高迎角におけるデルタ翼のマッハ数効果 On Classification of High-Speed High-angle Flows Over Delta Wings -Mach number effect- 小川烈, 東京電機大学, 埼玉県比企郡鳩山町大字石坂, E-mail: [email protected] 藤井孝藏, ISAS/JAXA, 神奈川県相模原市由野台
Microsoft PowerPoint - 次世代スパコン _v5.pptx
 2010.3.2 次世代スパコンが切り拓く可能性について 航空機開発とスーパーコンピュータ 中橋和博 東北大学大学院工学研究科 航空宇宙工学専攻 1 内 容 航空機の 100 年の進歩と最新旅客機 飛行機の空気力学 飛行機の空力設計手段 ; 風洞からスパコンへ スパコンで流れを観る スパコンで形をつくる MRJ 開発とスパコン スパコンの重要性 まとめ 2 飛行機 - 100 年の間の進歩 Wright
2010.3.2 次世代スパコンが切り拓く可能性について 航空機開発とスーパーコンピュータ 中橋和博 東北大学大学院工学研究科 航空宇宙工学専攻 1 内 容 航空機の 100 年の進歩と最新旅客機 飛行機の空気力学 飛行機の空力設計手段 ; 風洞からスパコンへ スパコンで流れを観る スパコンで形をつくる MRJ 開発とスパコン スパコンの重要性 まとめ 2 飛行機 - 100 年の間の進歩 Wright
x A Aω ẋ ẋ 2 + ω 2 x 2 = ω 2 A 2. (ẋ, ωx) ζ ẋ + iωx ζ ζ dζ = ẍ + iωẋ = ẍ + iω(ζ iωx) dt dζ dt iωζ = ẍ + ω2 x (2.1) ζ ζ = Aωe iωt = Aω cos ωt + iaω sin
 ζ ẋ + iωx ζ ζ dζ = ẍ + iωẋ = ẍ + iω(ζ iωx) dt dζ dt iωζ = ẍ + ω2 x (2.1) ζ ζ = Aωe iωt = Aω cos ωt + iaω sin") 2 2.1 F (t) 2.1.1 mẍ + kx = F (t). m ẍ + ω 2 x = F (t)/m ω = k/m. 1 : (ẋ, x) x = A sin ωt, ẋ = Aω cos ωt 1 2-1 x A Aω ẋ ẋ 2 + ω 2 x 2 = ω 2 A 2. (ẋ, ωx) ζ ẋ + iωx ζ ζ dζ = ẍ + iωẋ = ẍ + iω(ζ iωx) dt dζ
2 2.1 F (t) 2.1.1 mẍ + kx = F (t). m ẍ + ω 2 x = F (t)/m ω = k/m. 1 : (ẋ, x) x = A sin ωt, ẋ = Aω cos ωt 1 2-1 x A Aω ẋ ẋ 2 + ω 2 x 2 = ω 2 A 2. (ẋ, ωx) ζ ẋ + iωx ζ ζ dζ = ẍ + iωẋ = ẍ + iω(ζ iωx) dt dζ
2 図微小要素の流体の流入出 方向の断面の流体の流入出の収支断面 Ⅰ から微小要素に流入出する流体の流量 Q 断面 Ⅰ は 以下のように定式化できる Q 断面 Ⅰ 流量 密度 流速 断面 Ⅰ の面積 微小要素の断面 Ⅰ から だけ移動した断面 Ⅱ を流入出する流体の流量 Q 断面 Ⅱ は以下のように
 3 章 Web に Link 解説 連続式 微分表示 の誘導.64 *4. 連続式連続式は ある領域の内部にある流体の質量の収支が その表面からの流入出の合計と等しくなることを定式化したものであり 流体における質量保存則を示したものである 2. 連続式 微分表示 の誘導図のような微小要素 コントロールボリューム の領域内の流体の増減と外部からの流体の流入出を考えることで定式化できる 微小要素 流入
3 章 Web に Link 解説 連続式 微分表示 の誘導.64 *4. 連続式連続式は ある領域の内部にある流体の質量の収支が その表面からの流入出の合計と等しくなることを定式化したものであり 流体における質量保存則を示したものである 2. 連続式 微分表示 の誘導図のような微小要素 コントロールボリューム の領域内の流体の増減と外部からの流体の流入出を考えることで定式化できる 微小要素 流入

 オープン CAE シンポジウム @ 名古屋 C17 遷 速における OpenFOAM の圧縮性ソルバーの 較 2017 年 12 9 松原 輔 ( オープンCAE 勉強会 @ 関 ) 1 お詫びと訂正 講演概要集で誤記がありました 記載されている計算結果は 粘性 の速度の発散項はupwind で った結果となっております 境界条件にも誤記があります ( 後に します ) 申し訳ありません 2 目次
オープン CAE シンポジウム @ 名古屋 C17 遷 速における OpenFOAM の圧縮性ソルバーの 較 2017 年 12 9 松原 輔 ( オープンCAE 勉強会 @ 関 ) 1 お詫びと訂正 講演概要集で誤記がありました 記載されている計算結果は 粘性 の速度の発散項はupwind で った結果となっております 境界条件にも誤記があります ( 後に します ) 申し訳ありません 2 目次
Q = va = kia (1.2) 1.2 ( ) 2 ( 1.2) 1.2(a) (1.2) k = Q/iA = Q L/h A (1.3) 1.2(b) t 1 t 2 h 1 h 2 a
 1.2 ( ) 2 ( 1.2) 1.2(a) (1.2) k = Q/iA = Q L/h A (1.3) 1.2(b) t 1 t 2 h 1 h 2 a") 1 1 1.1 (Darcy) v(cm/s) (1.1) v = ki (1.1) v k i 1.1 h ( )L i = h/l 1.1 t 1 h(cm) (t 2 t 1 ) 1.1 A Q(cm 3 /s) 2 1 1.1 Q = va = kia (1.2) 1.2 ( ) 2 ( 1.2) 1.2(a) (1.2) k = Q/iA = Q L/h A (1.3) 1.2(b) t
1 1 1.1 (Darcy) v(cm/s) (1.1) v = ki (1.1) v k i 1.1 h ( )L i = h/l 1.1 t 1 h(cm) (t 2 t 1 ) 1.1 A Q(cm 3 /s) 2 1 1.1 Q = va = kia (1.2) 1.2 ( ) 2 ( 1.2) 1.2(a) (1.2) k = Q/iA = Q L/h A (1.3) 1.2(b) t
構造力学Ⅰ第12回
 第 回材の座屈 (0 章 ) p.5~ ( 復習 ) モールの定理 ( 手順 ) 座屈とは 荷重により梁に生じた曲げモーメントをで除して仮想荷重と考える 座屈荷重 偏心荷重 ( 曲げと軸力 ) 断面の核 この仮想荷重に対するある点でのせん断力 たわみ角に相当する曲げモーメント たわみに相当する ( 例 ) 単純梁の支点のたわみ角 : は 図 を仮想荷重と考えたときの 点の支点反力 B は 図 を仮想荷重と考えたときのB
第 回材の座屈 (0 章 ) p.5~ ( 復習 ) モールの定理 ( 手順 ) 座屈とは 荷重により梁に生じた曲げモーメントをで除して仮想荷重と考える 座屈荷重 偏心荷重 ( 曲げと軸力 ) 断面の核 この仮想荷重に対するある点でのせん断力 たわみ角に相当する曲げモーメント たわみに相当する ( 例 ) 単純梁の支点のたわみ角 : は 図 を仮想荷重と考えたときの 点の支点反力 B は 図 を仮想荷重と考えたときのB
Math-Aquarium 例題 図形と計量 図形と計量 1 直角三角形と三角比 P 木の先端を P, 根元を Q とする A 地点の目の位置 A' から 木の先端への仰角が 30,A から 7m 離れた AQB=90 と なる B 地点の目の位置 B' から木の先端への仰角が 45 であ るとき,
 図形と計量 直角三角形と三角比 P 木の先端を P, 根元を Q とする 地点の目の位置 ' から 木の先端への仰角が 0, から 7m 離れた Q=90 と なる 地点の目の位置 ' から木の先端への仰角が であ るとき, 木の高さを求めよ ただし, 目の高さを.m とし, Q' を右の図のように定める ' 0 Q' '.m Q 7m 要点 PQ PQ PQ' =x とおき,' Q',' Q' を
図形と計量 直角三角形と三角比 P 木の先端を P, 根元を Q とする 地点の目の位置 ' から 木の先端への仰角が 0, から 7m 離れた Q=90 と なる 地点の目の位置 ' から木の先端への仰角が であ るとき, 木の高さを求めよ ただし, 目の高さを.m とし, Q' を右の図のように定める ' 0 Q' '.m Q 7m 要点 PQ PQ PQ' =x とおき,' Q',' Q' を
人力飛行機 / 高高度無人機特有の飛行力学 / 空力弾性の連成に関する考察 髙嵜浩一
 人力飛行機 / 高高度無人機特有の飛行力学 / 空力弾性の連成に関する考察 髙嵜浩一 人力飛行機 / 高高度無人機特有の飛行力学 / 空力弾性の連成に関する考察 髙嵜浩一 はじめに : 本論の意図は,HPAを実際に飛ばす皆様からのフィードバックを得る事です 本論は頭の片隅に引っかかっていた疑問を低レベルの解析で確認したものにすぎません 学生さんの希望者多数の場合, 用いたソースコードを公開しますので,
人力飛行機 / 高高度無人機特有の飛行力学 / 空力弾性の連成に関する考察 髙嵜浩一 人力飛行機 / 高高度無人機特有の飛行力学 / 空力弾性の連成に関する考察 髙嵜浩一 はじめに : 本論の意図は,HPAを実際に飛ばす皆様からのフィードバックを得る事です 本論は頭の片隅に引っかかっていた疑問を低レベルの解析で確認したものにすぎません 学生さんの希望者多数の場合, 用いたソースコードを公開しますので,
116 宇宙航空研究開発機構特別資料 JAXA-SP cc ww1 = cc bb1 κκ 2 + (1 + cc bb2), σσ cc ww2 = 0.3, cc ww3 = 2, cc vv1 = 7.1, cc vv2 = 5 (4.7) 図 1 翼型モデルの外観 4. プリプ
, σσ cc ww2 = 0.3, cc ww3 = 2, cc vv1 = 7.1, cc vv2 = 5 (4.7) 図 1 翼型モデルの外観 4. プリプ") 第 45 回流体力学講演会 / 航空宇宙数値シミュレーション技術シンポジウム 2013 論文集 115 OpenFOAM を用いた NACA0012 翼型まわりの準二次元解析 中谷淳, 村澤杏樹岐阜工業高等専門学校 Quasi-2D Flow Analysis around NACA0012 Airfoil using OpenFOAM by Jun NAKAYA and Anju MURASAWA
第 45 回流体力学講演会 / 航空宇宙数値シミュレーション技術シンポジウム 2013 論文集 115 OpenFOAM を用いた NACA0012 翼型まわりの準二次元解析 中谷淳, 村澤杏樹岐阜工業高等専門学校 Quasi-2D Flow Analysis around NACA0012 Airfoil using OpenFOAM by Jun NAKAYA and Anju MURASAWA
Microsoft PowerPoint - 第7章(自然対流熱伝達 )_H27.ppt [互換モード]
![Microsoft PowerPoint - 第7章(自然対流熱伝達 )_H27.ppt [互換モード]](/thumbs/94/118222251.jpg "Microsoft PowerPoint - 第7章(自然対流熱伝達 )_H27.ppt [互換モード]") 第 7 章自然対流熱伝達 伝熱工学の基礎 : 伝熱の基本要素 フーリエの法則 ニュートンの冷却則 次元定常熱伝導 : 熱伝導率 熱通過率 熱伝導方程式 次元定常熱伝導 : ラプラスの方程式 数値解析の基礎 非定常熱伝導 : 非定常熱伝導方程式 ラプラス変換 フーリエ数とビオ数 対流熱伝達の基礎 : 熱伝達率 速度境界層と温度境界層 層流境界層と乱流境界層 境界層厚さ 混合平均温度 強制対流熱伝達 :
第 7 章自然対流熱伝達 伝熱工学の基礎 : 伝熱の基本要素 フーリエの法則 ニュートンの冷却則 次元定常熱伝導 : 熱伝導率 熱通過率 熱伝導方程式 次元定常熱伝導 : ラプラスの方程式 数値解析の基礎 非定常熱伝導 : 非定常熱伝導方程式 ラプラス変換 フーリエ数とビオ数 対流熱伝達の基礎 : 熱伝達率 速度境界層と温度境界層 層流境界層と乱流境界層 境界層厚さ 混合平均温度 強制対流熱伝達 :
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
Microsoft PowerPoint - 第3回MSBS研究会.pptx
 2013 年 3 月 1 日第 3 回 MSBS 研究会 アーチェリー矢の空力特性 MSBS 風洞実験と飛翔実験 電気通信大学大学院宮嵜武 JAXA 杉浦裕樹 円柱境界層 理論解 ( 境界層近似 ): 円柱側面の境界層 ( べき級数解 ) Seban & Bond (1951) J. Aero. Sci. 18 先端部べき級数解 Kelly (1954) J. Aero. Sci. 21 修正版べき級数解
2013 年 3 月 1 日第 3 回 MSBS 研究会 アーチェリー矢の空力特性 MSBS 風洞実験と飛翔実験 電気通信大学大学院宮嵜武 JAXA 杉浦裕樹 円柱境界層 理論解 ( 境界層近似 ): 円柱側面の境界層 ( べき級数解 ) Seban & Bond (1951) J. Aero. Sci. 18 先端部べき級数解 Kelly (1954) J. Aero. Sci. 21 修正版べき級数解
() x + y + y + x dy dx = 0 () dy + xy = x dx y + x y ( 5) ( s55906) 0.7. (). 5 (). ( 6) ( s6590) 0.8 m n. 0.9 n n A. ( 6) ( s6590) f A (λ) = det(a λi)
 x + y + y + x dy dx = 0 () dy + xy = x dx y + x y ( 5) ( s55906) 0.7. (). 5 (). ( 6) ( s6590) 0.8 m n. 0.9 n n A. ( 6) ( s6590) f A (λ) = det(a λi)") 0. A A = 4 IC () det A () A () x + y + z = x y z X Y Z = A x y z ( 5) ( s5590) 0. a + b + c b c () a a + b + c c a b a + b + c 0 a b c () a 0 c b b c 0 a c b a 0 0. A A = 7 5 4 5 0 ( 5) ( s5590) () A ()
0. A A = 4 IC () det A () A () x + y + z = x y z X Y Z = A x y z ( 5) ( s5590) 0. a + b + c b c () a a + b + c c a b a + b + c 0 a b c () a 0 c b b c 0 a c b a 0 0. A A = 7 5 4 5 0 ( 5) ( s5590) () A ()
火星探査航空機に向けた低レイノルズ数における フクロウ翼の空力特性 近藤勝俊 ( 東理大 ), 青野光, 野々村拓, 安養寺正之, 大山聖 (ISAS/JAXA), Tianshu Liu( ウエスタンミシガン大 ), 藤井孝藏 (ISAS/JAXA), 山本誠 ( 東理大 ) Katsutoshi
, 青野光, 野々村拓, 安養寺正之, 大山聖 (ISAS/JAXA), Tianshu Liu( ウエスタンミシガン大 ), 藤井孝藏 (ISAS/JAXA), 山本誠 ( 東理大 ) Katsutoshi") 火星探査航空機に向けた低レイノルズ数における フクロウ翼の空力特性 近藤勝俊 ( 東理大 ), 青野光, 野々村拓, 安養寺正之, 大山聖 (ISAS/JAXA), Tianshu Liu( ウエスタンミシガン大 ), 藤井孝藏 (ISAS/JAXA), 山本誠 ( 東理大 ) Katsutoshi Kondo (TUS), Hikaru Aono, Taku Nonomura, Masayuki
火星探査航空機に向けた低レイノルズ数における フクロウ翼の空力特性 近藤勝俊 ( 東理大 ), 青野光, 野々村拓, 安養寺正之, 大山聖 (ISAS/JAXA), Tianshu Liu( ウエスタンミシガン大 ), 藤井孝藏 (ISAS/JAXA), 山本誠 ( 東理大 ) Katsutoshi Kondo (TUS), Hikaru Aono, Taku Nonomura, Masayuki
Microsoft PowerPoint - Š’Š¬“H−w†i…„…C…m…‰…Y’fl†j.ppt
 乱流とは? 不規則運動であり, 速度の時空間的な変化が複雑であり, 個々の測定結果にはまったく再現性がなく, 偶然の値である. 渦運動 3 次元流れ 非定常流 乱流は確率過程 (Stochastic Process) である. 乱流工学 1 レイノルズの実験 UD = = ν 慣性力粘性力 乱流工学 F レイノルズ数 U L / U 3 = mα = ρl = ρ 慣性力 L U u U A = µ
乱流とは? 不規則運動であり, 速度の時空間的な変化が複雑であり, 個々の測定結果にはまったく再現性がなく, 偶然の値である. 渦運動 3 次元流れ 非定常流 乱流は確率過程 (Stochastic Process) である. 乱流工学 1 レイノルズの実験 UD = = ν 慣性力粘性力 乱流工学 F レイノルズ数 U L / U 3 = mα = ρl = ρ 慣性力 L U u U A = µ
第1章 単 位
 H. Hamano,. 長柱の座屈 - 長柱の座屈 長い柱は圧縮荷重によって折れてしまう場合がある. この現象を座屈といい, 座屈するときの荷重を座屈荷重という.. 換算長 長さ の柱に荷重が作用する場合, その支持方法によって, 柱の理論上の長さ L が異なる. 長柱の計算は, この L を用いて行うと都合がよい. この L を換算長 ( あるいは有効長さという ) という. 座屈荷重は一般に,
H. Hamano,. 長柱の座屈 - 長柱の座屈 長い柱は圧縮荷重によって折れてしまう場合がある. この現象を座屈といい, 座屈するときの荷重を座屈荷重という.. 換算長 長さ の柱に荷重が作用する場合, その支持方法によって, 柱の理論上の長さ L が異なる. 長柱の計算は, この L を用いて行うと都合がよい. この L を換算長 ( あるいは有効長さという ) という. 座屈荷重は一般に,
3.5 トランジスタ基本増幅回路 ベース接地基本増幅回路 C 1 C n n 2 R E p v V 2 v R E p 1 v EE 0 VCC 結合コンデンサ ベース接地基本増幅回路 V EE =0, V CC =0として交流分の回路 (C 1, C 2 により短絡 ) トランジスタ
 トランジスタ") 3.4 の特性を表す諸量 入力 i 2 出力 負荷抵抗 4 端子 (2 端子対 ) 回路としての の動作量 (i) 入力インピーダンス : Z i = (ii) 電圧利得 : A v = (iii) 電流利得 : A i = (iv) 電力利得 : A p = i 2 v2 i 2 i 2 =i 2 (v) 出力インピーダンス : Z o = i 2 = 0 i 2 入力 出力 出力インピーダンスの求め方
3.4 の特性を表す諸量 入力 i 2 出力 負荷抵抗 4 端子 (2 端子対 ) 回路としての の動作量 (i) 入力インピーダンス : Z i = (ii) 電圧利得 : A v = (iii) 電流利得 : A i = (iv) 電力利得 : A p = i 2 v2 i 2 i 2 =i 2 (v) 出力インピーダンス : Z o = i 2 = 0 i 2 入力 出力 出力インピーダンスの求め方
第 3 章二相流の圧力損失
 第 3 章二相流の圧力損失 単相流の圧力損失 圧力損失 (/) 壁面せん断応力 τ W 力のバランス P+ u m πd 4 τ w 4 τ D u τ w m w πd : 摩擦係数 λ : 円管の摩擦係数 λ D u m D P τ W 摩擦係数 層流 16/Re 乱流 0.079 Re -1/4 0.046 Re -0.0 (Blasius) (Colburn) 大まかには 0.005 二相流の圧力損失液相のみが流れた場合の単相流の圧力損失
第 3 章二相流の圧力損失 単相流の圧力損失 圧力損失 (/) 壁面せん断応力 τ W 力のバランス P+ u m πd 4 τ w 4 τ D u τ w m w πd : 摩擦係数 λ : 円管の摩擦係数 λ D u m D P τ W 摩擦係数 層流 16/Re 乱流 0.079 Re -1/4 0.046 Re -0.0 (Blasius) (Colburn) 大まかには 0.005 二相流の圧力損失液相のみが流れた場合の単相流の圧力損失
<897E8C F80837D A815B838B81458FE395948ECE95C7817B8145>
 円形標準マンホール 上部斜壁 + 床版タイプ 浮上がりの検討. 設計条件 () 設計地震動 地震動レベル () 概要図 呼び方内径 都型 ( 内径 0cm) 00 00 0 600 0 0.00.0 0.0 0.0.0.70 0 60 00 60 60 00.0.0 00 00 00 00 00 P () マンホール条件 ) 寸法諸元 6 7 種類 呼び名 高さ モル 上部 下部 タル 外径 内径
円形標準マンホール 上部斜壁 + 床版タイプ 浮上がりの検討. 設計条件 () 設計地震動 地震動レベル () 概要図 呼び方内径 都型 ( 内径 0cm) 00 00 0 600 0 0.00.0 0.0 0.0.0.70 0 60 00 60 60 00.0.0 00 00 00 00 00 P () マンホール条件 ) 寸法諸元 6 7 種類 呼び名 高さ モル 上部 下部 タル 外径 内径
LES によるフクロウ翼 (Re=23000) の空力特性評価 第 26 回数値流体力学シンポジウム講演番号 D07-4 Aerodynamic Characteristics of Owl-like Airfoil(Re=23000)using LES 近藤勝俊, 東理大, 東京都千代田区九段北
 の空力特性評価 第 26 回数値流体力学シンポジウム講演番号 D07-4 Aerodynamic Characteristics of Owl-like Airfoil(Re=23000)using LES 近藤勝俊, 東理大, 東京都千代田区九段北") LES によるフクロウ翼 (Re=23000) の空力特性評価 Aerodynamic Characteristics of Owl-like Airfoil(Re=23000)using LES 近藤勝俊, 東理大, 東京都千代田区九段北 1-14-6, E-mail: [email protected] 青野光, 宇宙研, 神奈川県相模原市中央区由野台 3-1-1, E-mail:
LES によるフクロウ翼 (Re=23000) の空力特性評価 Aerodynamic Characteristics of Owl-like Airfoil(Re=23000)using LES 近藤勝俊, 東理大, 東京都千代田区九段北 1-14-6, E-mail: [email protected] 青野光, 宇宙研, 神奈川県相模原市中央区由野台 3-1-1, E-mail:
IA 2013 : :10722 : 2 : :2 :761 :1 (23-27) : : ( / ) (1 /, ) / e.g. (Taylar ) e x = 1 + x + x xn n! +... sin x = x x3 6 + x5 x2n+1 + (
 : : ( / ) (1 /, ) / e.g. (Taylar ) e x = 1 + x + x xn n! +... sin x = x x3 6 + x5 x2n+1 + (") IA 2013 : :10722 : 2 : :2 :761 :1 23-27) : : 1 1.1 / ) 1 /, ) / e.g. Taylar ) e x = 1 + x + x2 2 +... + xn n! +... sin x = x x3 6 + x5 x2n+1 + 1)n 5! 2n + 1)! 2 2.1 = 1 e.g. 0 = 0.00..., π = 3.14..., 1
IA 2013 : :10722 : 2 : :2 :761 :1 23-27) : : 1 1.1 / ) 1 /, ) / e.g. Taylar ) e x = 1 + x + x2 2 +... + xn n! +... sin x = x x3 6 + x5 x2n+1 + 1)n 5! 2n + 1)! 2 2.1 = 1 e.g. 0 = 0.00..., π = 3.14..., 1
19年度一次基礎科目計算問題略解
 9 年度機械科目 ( 計算問題主体 ) 略解 基礎科目の解析の延長としてわかる範囲でトライしてみたものです Coprigh (c) 7 宮田明則技術士事務所 Coprigh (c) 7 宮田明則技術士事務所 Ⅳ- よってから は許容荷重として は直径をロ - プの断面積 Ⅳ- cr E E E I, から Ⅳ- Ⅳ- : q q q q q q q q q で絶対値が最大 で絶対値が最大モーメントはいずれも中央で最大となる
9 年度機械科目 ( 計算問題主体 ) 略解 基礎科目の解析の延長としてわかる範囲でトライしてみたものです Coprigh (c) 7 宮田明則技術士事務所 Coprigh (c) 7 宮田明則技術士事務所 Ⅳ- よってから は許容荷重として は直径をロ - プの断面積 Ⅳ- cr E E E I, から Ⅳ- Ⅳ- : q q q q q q q q q で絶対値が最大 で絶対値が最大モーメントはいずれも中央で最大となる
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
untitled
 CFD JAXA CFD CFD Navier-Stokes -1- -2-1 CFD CFD Navier-Stokes 1. 2. 2,500,000 CFD Copyright Boeing CFD Boeing B777 HP -3- -4-2 CFD European Transonic Wind tunnel (-163 ) JAXA 2mx2m CFD (Computational Fluid
CFD JAXA CFD CFD Navier-Stokes -1- -2-1 CFD CFD Navier-Stokes 1. 2. 2,500,000 CFD Copyright Boeing CFD Boeing B777 HP -3- -4-2 CFD European Transonic Wind tunnel (-163 ) JAXA 2mx2m CFD (Computational Fluid
<8D5C91A28C768E5A8F91836C C768E5A8F A2E786C73>
 スカイセイフティネット構造計算書 スカイテック株式会社 1. 標準寸法 2. 設計条件 (1) 荷重 通常の使用では スカイセーフティネットに人や物は乗せないことを原則とするが 仮定の荷重としてアスファルト ルーフィング1 巻 30kgが1スパンに1 個乗ったとした場合を考える ネットの自重は12kgf/1 枚 これに単管 (2.73kgf/m) を1m 辺り2 本考える 従ってネット自重は合計で
スカイセイフティネット構造計算書 スカイテック株式会社 1. 標準寸法 2. 設計条件 (1) 荷重 通常の使用では スカイセーフティネットに人や物は乗せないことを原則とするが 仮定の荷重としてアスファルト ルーフィング1 巻 30kgが1スパンに1 個乗ったとした場合を考える ネットの自重は12kgf/1 枚 これに単管 (2.73kgf/m) を1m 辺り2 本考える 従ってネット自重は合計で
伝熱学課題
 練習問題解答例 < 第 9 章熱交換器 > 9. 入口温度 0 の kg/ の水と 入口温度 0 の 0 kg/ の水の間で熱交換を行 う 前者の出口温度が 40 の時 後者の出口温度はいくらか 解 ) 式 (9.) を使う,,,, において どちらの流体も水より に注意して 0 40 0 0, これを解いて, 9. 0 の水を用いて 0.MPa の飽和蒸気 kg/ と熱交換させ 蒸気を復水させること
練習問題解答例 < 第 9 章熱交換器 > 9. 入口温度 0 の kg/ の水と 入口温度 0 の 0 kg/ の水の間で熱交換を行 う 前者の出口温度が 40 の時 後者の出口温度はいくらか 解 ) 式 (9.) を使う,,,, において どちらの流体も水より に注意して 0 40 0 0, これを解いて, 9. 0 の水を用いて 0.MPa の飽和蒸気 kg/ と熱交換させ 蒸気を復水させること
1 7 ω ω ω 7.1 0, ( ) Q, 7.2 ( Q ) 7.1 ω Z = R +jx Z 1/ Z 7.2 ω 7.2 Abs. admittance (x10-3 S) RLC Series Circuit Y R = 20 Ω L = 100
 Q, 7.2 ( Q ) 7.1 ω Z = R +jx Z 1/ Z 7.2 ω 7.2 Abs. admittance (x10-3 S) RLC Series Circuit Y R = 20 Ω L = 100") 7 7., ) Q, 7. Q ) 7. Z = R +jx Z / Z 7. 7. Abs. admittance x -3 S) 5 4 3 R Series ircuit Y R = Ω = mh = uf Q = 5 5 5 V) Z = R + jx 7. Z 7. ) R = Ω = mh = µf ) 7 V) R Z s = R + j ) 7.3 R =. 7.4) ) f = π.
7 7., ) Q, 7. Q ) 7. Z = R +jx Z / Z 7. 7. Abs. admittance x -3 S) 5 4 3 R Series ircuit Y R = Ω = mh = uf Q = 5 5 5 V) Z = R + jx 7. Z 7. ) R = Ω = mh = µf ) 7 V) R Z s = R + j ) 7.3 R =. 7.4) ) f = π.
TM
 NALTR-1390 TR-1390 ISSN 0452-2982 UDC 533.6.013.1 533.6.013.4 533.6.69.048 NAL TECHNICAL REPORT OF NATIONAL AEROSPACE LABORATORY TR-1390 e N 1999 11 NATIONAL AEROSPACE LABORATORY ... 1 e N... 2 Orr-Sommerfeld...
NALTR-1390 TR-1390 ISSN 0452-2982 UDC 533.6.013.1 533.6.013.4 533.6.69.048 NAL TECHNICAL REPORT OF NATIONAL AEROSPACE LABORATORY TR-1390 e N 1999 11 NATIONAL AEROSPACE LABORATORY ... 1 e N... 2 Orr-Sommerfeld...
PowerPoint プレゼンテーション
 デジタルエンジニアリング演習 流体 CAE 演習 (1) 2014 年 10 月 10 日 ( 金 ) 担当 : 杵淵郁也, 波田野明日可石川明克, 諸山稔員 流れの数値シミュレーション CFD = Computational Fluid Dynamics ( 数値流体力学 ) v t ( v ) v v 0 1 p 2 v F http://jda.jaxa.jp/ http://ansys.jp/applications/industry/auto/index_a.html
デジタルエンジニアリング演習 流体 CAE 演習 (1) 2014 年 10 月 10 日 ( 金 ) 担当 : 杵淵郁也, 波田野明日可石川明克, 諸山稔員 流れの数値シミュレーション CFD = Computational Fluid Dynamics ( 数値流体力学 ) v t ( v ) v v 0 1 p 2 v F http://jda.jaxa.jp/ http://ansys.jp/applications/industry/auto/index_a.html
(ii) (iii) z a = z a =2 z a =6 sin z z a dz. cosh z z a dz. e z dz. (, a b > 6.) (z a)(z b) 52.. (a) dz, ( a = /6.), (b) z =6 az (c) z a =2 53. f n (z
 (iii) z a = z a =2 z a =6 sin z z a dz. cosh z z a dz. e z dz. (, a b > 6.) (z a)(z b) 52.. (a) dz, ( a = /6.), (b) z =6 az (c) z a =2 53. f n (z") B 4 24 7 9 ( ) :,..,,.,. 4 4. f(z): D C: D a C, 2πi C f(z) dz = f(a). z a a C, ( ). (ii), a D, a U a,r D f. f(z) = A n (z a) n, z U a,r, n= A n := 2πi C f(ζ) dζ, n =,,..., (ζ a) n+, C a D. (iii) U a,r
B 4 24 7 9 ( ) :,..,,.,. 4 4. f(z): D C: D a C, 2πi C f(z) dz = f(a). z a a C, ( ). (ii), a D, a U a,r D f. f(z) = A n (z a) n, z U a,r, n= A n := 2πi C f(ζ) dζ, n =,,..., (ζ a) n+, C a D. (iii) U a,r
<4D F736F F F696E74202D A957A A8EC0895E8D7182C982A882AF82E EF89FC915082CC82BD82DF82CC A83808DC5934B89BB A2E >
 Techno Forum 2012 実運航における燃費改善のためのトリム最適化 株式会社 MTI 技術戦略グループ上級研究員堀正寿 1 目次 1. はじめに 2. 最適トリムの評価手法 2-1. オペレーションプロファイル調査 2-2. 水槽試験とトリム影響解析 2-3. 実船検証 3. トリムチャートと運用 4. まとめ 2 1-1 トリムの定義 1. はじめに 船尾喫水 (da) と船首喫水 (df)
Techno Forum 2012 実運航における燃費改善のためのトリム最適化 株式会社 MTI 技術戦略グループ上級研究員堀正寿 1 目次 1. はじめに 2. 最適トリムの評価手法 2-1. オペレーションプロファイル調査 2-2. 水槽試験とトリム影響解析 2-3. 実船検証 3. トリムチャートと運用 4. まとめ 2 1-1 トリムの定義 1. はじめに 船尾喫水 (da) と船首喫水 (df)
( 慣性抵抗 ) 速度の 2 乗に比例流体中を進む物体は前面にある流体を押しのけて進む. 物 aaa 体の後面には流体が付き従う ( 渦を巻いて ). 前面にある速度 0 の流体が後面に移動して速度 vとなったと考えてよい. この流体の質量は単位時間内に物体が押しのける体積に比例するので,v に比例
 速度の 2 乗に比例流体中を進む物体は前面にある流体を押しのけて進む. 物 aaa 体の後面には流体が付き従う ( 渦を巻いて ). 前面にある速度 0 の流体が後面に移動して速度 vとなったと考えてよい. この流体の質量は単位時間内に物体が押しのける体積に比例するので,v に比例") 空気抵抗があるときの自由落下 抵抗が速度に比例する場合 1. 絵を描く, 座標と情報, 記号を記入する x F0 v
空気抵抗があるときの自由落下 抵抗が速度に比例する場合 1. 絵を描く, 座標と情報, 記号を記入する x F0 v
dvipsj.8449.dvi
 9 1 9 9.1 9 2 (1) 9.1 9.2 σ a = σ Y FS σ a : σ Y : σ b = M I c = M W FS : M : I : c : = σ b
9 1 9 9.1 9 2 (1) 9.1 9.2 σ a = σ Y FS σ a : σ Y : σ b = M I c = M W FS : M : I : c : = σ b
学習内容と日常生活との関連性の研究-第2部-第4章-1
 69 V A V + A V A 2A 2 http://www.jba-hp.jp/ http://www.kbn3.com/ http://www.usba.org/ 70 (1) (1996)35 7 pp.28-33 (2) (1994) 71 () 3 1 1 99 8 1 10 1 11.3 2.5 1 100 11.4 30.9 1 72 (1) http://www.stat.go.jp/data/zensho/1999/zuhyou/a906-6.xls
69 V A V + A V A 2A 2 http://www.jba-hp.jp/ http://www.kbn3.com/ http://www.usba.org/ 70 (1) (1996)35 7 pp.28-33 (2) (1994) 71 () 3 1 1 99 8 1 10 1 11.3 2.5 1 100 11.4 30.9 1 72 (1) http://www.stat.go.jp/data/zensho/1999/zuhyou/a906-6.xls
 = hυ = h c λ υ λ (ev) = 1240 λ W=NE = Nhc λ W= N 2 10-16 λ / / Φe = dqe dt J/s Φ = km Φe(λ)v(λ)dλ THBV3_0101JA Qe = Φedt (W s) Q = Φdt lm s Ee = dφe ds E = dφ ds Φ Φ THBV3_0102JA Me = dφe ds M = dφ ds
= hυ = h c λ υ λ (ev) = 1240 λ W=NE = Nhc λ W= N 2 10-16 λ / / Φe = dqe dt J/s Φ = km Φe(λ)v(λ)dλ THBV3_0101JA Qe = Φedt (W s) Q = Φdt lm s Ee = dφe ds E = dφ ds Φ Φ THBV3_0102JA Me = dφe ds M = dφ ds
物理演習問題
 < 物理 > =0 問 ビルの高さを, ある速さ ( 初速 をとおく,において等加速度運動の公式より (- : -= t - t : -=- t - t (-, 式よりを消去すると t - t =- t - t ( + - ( + ( - =0 0 t t t t t t ( t + t - ( t - =0 t=t t=t t - 地面 ( t - t t +t 0 より, = 3 図 問 が最高点では速度が
< 物理 > =0 問 ビルの高さを, ある速さ ( 初速 をとおく,において等加速度運動の公式より (- : -= t - t : -=- t - t (-, 式よりを消去すると t - t =- t - t ( + - ( + ( - =0 0 t t t t t t ( t + t - ( t - =0 t=t t=t t - 地面 ( t - t t +t 0 より, = 3 図 問 が最高点では速度が
[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s
![[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s](/thumbs/94/118579915.jpg "[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s") [ ]. lim e 3 IC ) s49). y = e + ) ) y = / + ).3 d 4 ) e sin d 3) sin d ) s49) s493).4 z = y z z y s494).5 + y = 4 =.6 s495) dy = 3e ) d dy d = y s496).7 lim ) lim e s49).8 y = e sin ) y = sin e 3) y =
[ ]. lim e 3 IC ) s49). y = e + ) ) y = / + ).3 d 4 ) e sin d 3) sin d ) s49) s493).4 z = y z z y s494).5 + y = 4 =.6 s495) dy = 3e ) d dy d = y s496).7 lim ) lim e s49).8 y = e sin ) y = sin e 3) y =
, x R, f (x),, df dx : R R,, f : R R, f(x) ( ).,, f (a) d f dx (a), f (a) d3 f dx 3 (a),, f (n) (a) dn f dx n (a), f d f dx, f d3 f dx 3,, f (n) dn f
,, df dx : R R,, f : R R, f(x) ( ).,, f (a) d f dx (a), f (a) d3 f dx 3 (a),, f (n) (a) dn f dx n (a), f d f dx, f d3 f dx 3,, f (n) dn f") ,,,,.,,,. R f : R R R a R, f(a + ) f(a) lim 0 (), df dx (a) f (a), f(x) x a, f (a), f(x) x a ( ). y f(a + ) y f(x) f(a+) f(a) f(a + ) f(a) f(a) x a 0 a a + x 0 a a + x y y f(x) 0 : 0, f(a+) f(a)., f(x)
,,,,.,,,. R f : R R R a R, f(a + ) f(a) lim 0 (), df dx (a) f (a), f(x) x a, f (a), f(x) x a ( ). y f(a + ) y f(x) f(a+) f(a) f(a + ) f(a) f(a) x a 0 a a + x 0 a a + x y y f(x) 0 : 0, f(a+) f(a)., f(x)
( ) sin 1 x, cos 1 x, tan 1 x sin x, cos x, tan x, arcsin x, arccos x, arctan x. π 2 sin 1 x π 2, 0 cos 1 x π, π 2 < tan 1 x < π 2 1 (1) (
 sin 1 x, cos 1 x, tan 1 x sin x, cos x, tan x, arcsin x, arccos x, arctan x. π 2 sin 1 x π 2, 0 cos 1 x π, π 2 < tan 1 x < π 2 1 (1) (") 6 20 ( ) sin, cos, tan sin, cos, tan, arcsin, arccos, arctan. π 2 sin π 2, 0 cos π, π 2 < tan < π 2 () ( 2 2 lim 2 ( 2 ) ) 2 = 3 sin (2) lim 5 0 = 2 2 0 0 2 2 3 3 4 5 5 2 5 6 3 5 7 4 5 8 4 9 3 4 a 3 b
6 20 ( ) sin, cos, tan sin, cos, tan, arcsin, arccos, arctan. π 2 sin π 2, 0 cos π, π 2 < tan < π 2 () ( 2 2 lim 2 ( 2 ) ) 2 = 3 sin (2) lim 5 0 = 2 2 0 0 2 2 3 3 4 5 5 2 5 6 3 5 7 4 5 8 4 9 3 4 a 3 b
極超音速旅客機の実現に向けた研究開発
 ( 公財 ) 航空機国際共同開発促進基金 解説概要 24-4 この解説概要に対するアンケートにご協力ください 極超音速旅客機の実現に向けた研究開発 1. はじめにマッハ5クラスの極超音速旅客機が実現すると 現在 10 時間程度かかる太平洋横断飛行が 2 時間程度に短縮される この極超音速旅客機を実現するには 揚力比向上のための空力技術 空力加熱環境の中でも作動可能な極超音速エンジン技術 遮熱構造技術を確立する必要がある
( 公財 ) 航空機国際共同開発促進基金 解説概要 24-4 この解説概要に対するアンケートにご協力ください 極超音速旅客機の実現に向けた研究開発 1. はじめにマッハ5クラスの極超音速旅客機が実現すると 現在 10 時間程度かかる太平洋横断飛行が 2 時間程度に短縮される この極超音速旅客機を実現するには 揚力比向上のための空力技術 空力加熱環境の中でも作動可能な極超音速エンジン技術 遮熱構造技術を確立する必要がある
sikepuri.dvi
 2009 2 2 2. 2.. F(s) G(s) H(s) G(s) F(s) H(s) F(s),G(s) H(s) : V (s) Z(s)I(s) I(s) Y (s)v (s) Z(s): Y (s): 2: ( ( V V 2 I I 2 ) ( ) ( Z Z 2 Z 2 Z 22 ) ( ) ( Y Y 2 Y 2 Y 22 ( ) ( ) Z Z 2 Y Y 2 : : Z 2 Z
2009 2 2 2. 2.. F(s) G(s) H(s) G(s) F(s) H(s) F(s),G(s) H(s) : V (s) Z(s)I(s) I(s) Y (s)v (s) Z(s): Y (s): 2: ( ( V V 2 I I 2 ) ( ) ( Z Z 2 Z 2 Z 22 ) ( ) ( Y Y 2 Y 2 Y 22 ( ) ( ) Z Z 2 Y Y 2 : : Z 2 Z
Chap9.dvi
 .,. f(),, f(),,.,. () lim 2 +3 2 9 (2) lim 3 3 2 9 (4) lim ( ) 2 3 +3 (5) lim 2 9 (6) lim + (7) lim (8) lim (9) lim (0) lim 2 3 + 3 9 2 2 +3 () lim sin 2 sin 2 (2) lim +3 () lim 2 2 9 = 5 5 = 3 (2) lim
.,. f(),, f(),,.,. () lim 2 +3 2 9 (2) lim 3 3 2 9 (4) lim ( ) 2 3 +3 (5) lim 2 9 (6) lim + (7) lim (8) lim (9) lim (0) lim 2 3 + 3 9 2 2 +3 () lim sin 2 sin 2 (2) lim +3 () lim 2 2 9 = 5 5 = 3 (2) lim
道路橋の耐震設計における鉄筋コンクリート橋脚の水平力 - 水平変位関係の計算例 (H24 版対応 ) ( 社 ) 日本道路協会 橋梁委員会 耐震設計小委員会 平成 24 年 5 月
 ( 社 ) 日本道路協会 橋梁委員会 耐震設計小委員会 平成 24 年 5 月") 道路橋の耐震設計における鉄筋コンクリート橋脚の水平力 - 水平変位関係の計算例 (H24 版対応 ) ( 社 ) 日本道路協会 橋梁委員会 耐震設計小委員会 平成 24 年 5 月 目次 本資料の利用にあたって 1 矩形断面の橋軸方向の水平耐力及び水平変位の計算例 2 矩形断面 (D51 SD490 使用 ) 橋軸方向の水平耐力及び水平変位の計算例 8 矩形断面の橋軸直角方向の水平耐力及び水平変位の計算例
道路橋の耐震設計における鉄筋コンクリート橋脚の水平力 - 水平変位関係の計算例 (H24 版対応 ) ( 社 ) 日本道路協会 橋梁委員会 耐震設計小委員会 平成 24 年 5 月 目次 本資料の利用にあたって 1 矩形断面の橋軸方向の水平耐力及び水平変位の計算例 2 矩形断面 (D51 SD490 使用 ) 橋軸方向の水平耐力及び水平変位の計算例 8 矩形断面の橋軸直角方向の水平耐力及び水平変位の計算例
f (x) x y f(x+dx) f(x) Df 関数 接線 x Dx x 1 x x y f f x (1) x x 0 f (x + x) f (x) f (2) f (x + x) f (x) + f = f (x) + f x (3) x f
 x y f(x+dx) f(x) Df 関数 接線 x Dx x 1 x x y f f x (1) x x 0 f (x + x) f (x) f (2) f (x + x) f (x) + f = f (x) + f x (3) x f") 208 3 28. f fd f Df 関数 接線 D f f 0 f f f 2 f f f f f 3 f lim f f df 0 d 4 f df d 3 f d f df d 5 d c 208 2 f f t t f df d 6 d t dt 7 f df df d d df dt lim f 0 t df d d dt d t 8 dt 9.2 f,, f 0 f 0 lim 0 lim
208 3 28. f fd f Df 関数 接線 D f f 0 f f f 2 f f f f f 3 f lim f f df 0 d 4 f df d 3 f d f df d 5 d c 208 2 f f t t f df d 6 d t dt 7 f df df d d df dt lim f 0 t df d d dt d t 8 dt 9.2 f,, f 0 f 0 lim 0 lim
(1.2) T D = 0 T = D = 30 kn 1.2 (1.4) 2F W = 0 F = W/2 = 300 kn/2 = 150 kn 1.3 (1.9) R = W 1 + W 2 = = 1100 N. (1.9) W 2 b W 1 a = 0
 T D = 0 T = D = 30 kn 1.2 (1.4) 2F W = 0 F = W/2 = 300 kn/2 = 150 kn 1.3 (1.9) R = W 1 + W 2 = = 1100 N. (1.9) W 2 b W 1 a = 0") 1 1 1.1 1.) T D = T = D = kn 1. 1.4) F W = F = W/ = kn/ = 15 kn 1. 1.9) R = W 1 + W = 6 + 5 = 11 N. 1.9) W b W 1 a = a = W /W 1 )b = 5/6) = 5 cm 1.4 AB AC P 1, P x, y x, y y x 1.4.) P sin 6 + P 1 sin 45
1 1 1.1 1.) T D = T = D = kn 1. 1.4) F W = F = W/ = kn/ = 15 kn 1. 1.9) R = W 1 + W = 6 + 5 = 11 N. 1.9) W b W 1 a = a = W /W 1 )b = 5/6) = 5 cm 1.4 AB AC P 1, P x, y x, y y x 1.4.) P sin 6 + P 1 sin 45
ohp_06nov_tohoku.dvi
 2006 11 28 1. (1) ẋ = ax = x(t) =Ce at C C>0 a0 x(t) 0(t )!! 1 0.8 0.6 0.4 0.2 2 4 6 8 10-0.2 (1) a =2 C =1 1. (1) τ>0 (2) ẋ(t) = ax(t τ) 4 2 2 4 6 8 10-2 -4 (2) a =2 τ =1!! 1. (2) A. (2)
2006 11 28 1. (1) ẋ = ax = x(t) =Ce at C C>0 a0 x(t) 0(t )!! 1 0.8 0.6 0.4 0.2 2 4 6 8 10-0.2 (1) a =2 C =1 1. (1) τ>0 (2) ẋ(t) = ax(t τ) 4 2 2 4 6 8 10-2 -4 (2) a =2 τ =1!! 1. (2) A. (2)
解説の図
 翼設計と製作方法 ( 翼の外皮の張り方 ) ここでは翼形状および翼構造の決定指針と翼の製作に関するアドバイスを述べたいと思います 第一回大会では翼面積が不足しており 飛行速度が高く危険な機体が何機か見られました また 表面の仕上りを重視するあまり フィルムにアイロンをかけすぎてしまい 骨組みをゆがめてしまっている例が多数見られました 第 1 章 第 2 章 第 3 章で翼平面形状 翼型 構造に関して述べています
翼設計と製作方法 ( 翼の外皮の張り方 ) ここでは翼形状および翼構造の決定指針と翼の製作に関するアドバイスを述べたいと思います 第一回大会では翼面積が不足しており 飛行速度が高く危険な機体が何機か見られました また 表面の仕上りを重視するあまり フィルムにアイロンをかけすぎてしまい 骨組みをゆがめてしまっている例が多数見られました 第 1 章 第 2 章 第 3 章で翼平面形状 翼型 構造に関して述べています
1 1. x 1 (1) x 2 + 2x + 5 dx d dx (x2 + 2x + 5) = 2(x + 1) x 1 x 2 + 2x + 5 = x + 1 x 2 + 2x x 2 + 2x + 5 y = x 2 + 2x + 5 dy = 2(x + 1)dx x + 1
 x 2 + 2x + 5 dx d dx (x2 + 2x + 5) = 2(x + 1) x 1 x 2 + 2x + 5 = x + 1 x 2 + 2x x 2 + 2x + 5 y = x 2 + 2x + 5 dy = 2(x + 1)dx x + 1") . ( + + 5 d ( + + 5 ( + + + 5 + + + 5 + + 5 y + + 5 dy ( + + dy + + 5 y log y + C log( + + 5 + C. ++5 (+ +4 y (+/ + + 5 (y + 4 4(y + dy + + 5 dy Arctany+C Arctan + y ( + +C. + + 5 ( + log( + + 5 Arctan
. ( + + 5 d ( + + 5 ( + + + 5 + + + 5 + + 5 y + + 5 dy ( + + dy + + 5 y log y + C log( + + 5 + C. ++5 (+ +4 y (+/ + + 5 (y + 4 4(y + dy + + 5 dy Arctany+C Arctan + y ( + +C. + + 5 ( + log( + + 5 Arctan
LCR e ix LC AM m k x m x x > 0 x < 0 F x > 0 x < 0 F = k x (k > 0) k x = x(t)
 k x = x(t)") 338 7 7.3 LCR 2.4.3 e ix LC AM 7.3.1 7.3.1.1 m k x m x x > 0 x < 0 F x > 0 x < 0 F = k x k > 0 k 5.3.1.1 x = xt 7.3 339 m 2 x t 2 = k x 2 x t 2 = ω 2 0 x ω0 = k m ω 0 1.4.4.3 2 +α 14.9.3.1 5.3.2.1 2 x
338 7 7.3 LCR 2.4.3 e ix LC AM 7.3.1 7.3.1.1 m k x m x x > 0 x < 0 F x > 0 x < 0 F = k x k > 0 k 5.3.1.1 x = xt 7.3 339 m 2 x t 2 = k x 2 x t 2 = ω 2 0 x ω0 = k m ω 0 1.4.4.3 2 +α 14.9.3.1 5.3.2.1 2 x
c 2009 i
 I 2009 c 2009 i 0 1 0.0................................... 1 0.1.............................. 3 0.2.............................. 5 1 7 1.1................................. 7 1.2..............................
I 2009 c 2009 i 0 1 0.0................................... 1 0.1.............................. 3 0.2.............................. 5 1 7 1.1................................. 7 1.2..............................
arctan 1 arctan arctan arctan π = = ( ) π = 4 = π = π = π = =
 π = 4 = π = π = π = =") arctan arctan arctan arctan 2 2000 π = 3 + 8 = 3.25 ( ) 2 8 650 π = 4 = 3.6049 9 550 π = 3 3 30 π = 3.622 264 π = 3.459 3 + 0 7 = 3.4085 < π < 3 + 7 = 3.4286 380 π = 3 + 77 250 = 3.46 5 3.45926 < π < 3.45927
arctan arctan arctan arctan 2 2000 π = 3 + 8 = 3.25 ( ) 2 8 650 π = 4 = 3.6049 9 550 π = 3 3 30 π = 3.622 264 π = 3.459 3 + 0 7 = 3.4085 < π < 3 + 7 = 3.4286 380 π = 3 + 77 250 = 3.46 5 3.45926 < π < 3.45927
TCSE4~5
 II. T = 1 m!! U = mg!(1 cos!) E = T + U! E U = T E U! m U,E mg! U = mg!(1! cos)! < E < mg! mg! < E! L = T!U = 1 m!! mg!(1! cos) d L! L = L = L m!, =!mg!sin m! + mg!sin = d =! g! sin & g! d =! sin ! = v
II. T = 1 m!! U = mg!(1 cos!) E = T + U! E U = T E U! m U,E mg! U = mg!(1! cos)! < E < mg! mg! < E! L = T!U = 1 m!! mg!(1! cos) d L! L = L = L m!, =!mg!sin m! + mg!sin = d =! g! sin & g! d =! sin ! = v
I A A441 : April 15, 2013 Version : 1.1 I Kawahira, Tomoki TA (Shigehiro, Yoshida )
") I013 00-1 : April 15, 013 Version : 1.1 I Kawahira, Tomoki TA (Shigehiro, Yoshida) http://www.math.nagoya-u.ac.jp/~kawahira/courses/13s-tenbou.html pdf * 4 15 4 5 13 e πi = 1 5 0 5 7 3 4 6 3 6 10 6 17
I013 00-1 : April 15, 013 Version : 1.1 I Kawahira, Tomoki TA (Shigehiro, Yoshida) http://www.math.nagoya-u.ac.jp/~kawahira/courses/13s-tenbou.html pdf * 4 15 4 5 13 e πi = 1 5 0 5 7 3 4 6 3 6 10 6 17
生産者行動の理論(1)
") 生産者行動の理論 (1) 生産者の行動 利潤最大化 生産の技術的制約のもとで 生産の技術的制約 生産関数, 費用関数 短期と長期 生産関数の基礎概念 投入物と産出物 規模に関する収穫 限界生産物, 平均生産物 等量曲線 費用関数の基礎概念 短期と長期 固定費用, 可変費用 平均費用, 限界費用 生産者行動の理論 利潤最大化 生産の技術的制約のもとで, 利潤 = 収入ー費用を最大にするように行動 消費者行動
生産者行動の理論 (1) 生産者の行動 利潤最大化 生産の技術的制約のもとで 生産の技術的制約 生産関数, 費用関数 短期と長期 生産関数の基礎概念 投入物と産出物 規模に関する収穫 限界生産物, 平均生産物 等量曲線 費用関数の基礎概念 短期と長期 固定費用, 可変費用 平均費用, 限界費用 生産者行動の理論 利潤最大化 生産の技術的制約のもとで, 利潤 = 収入ー費用を最大にするように行動 消費者行動
30 (Electrical Engineering I) () LED IC 1. LED, IC D () 2 2 LED 6 4 ANDORNOTEXOR : : () () () () () 1 LED, IC 2 LED, IC LED, I
 () LED IC 1. LED, IC D () 2 2 LED 6 4 ANDORNOTEXOR : : () () () () () 1 LED, IC 2 LED, IC LED, I") 30 (Information Processing I) () 2 1 2 Word Excel WordExcel 1. EXCEL,WORD 2. D () 2 10 4 2 10 2 30 : () () () () () 1 EXCEL,WORD EXCEL,WORD EXCEL,WORD EXCEL,WORD 2 30 (Electrical Engineering I) () 2 1
30 (Information Processing I) () 2 1 2 Word Excel WordExcel 1. EXCEL,WORD 2. D () 2 10 4 2 10 2 30 : () () () () () 1 EXCEL,WORD EXCEL,WORD EXCEL,WORD EXCEL,WORD 2 30 (Electrical Engineering I) () 2 1
untitled
 ()(H) () / (havng) W W mg ρg d (.) m ρ d d () ( d ) F ρg (.) ρg m () G B :m :W W mg ρg m ρ (.3) η ( d η) F ρg ( d η) (.4) G B :m :W η F()- F()- η ρ ρ d F W d d m g g η ρ ρ d d m g g (.5) a (.5) Laplac
()(H) () / (havng) W W mg ρg d (.) m ρ d d () ( d ) F ρg (.) ρg m () G B :m :W W mg ρg m ρ (.3) η ( d η) F ρg ( d η) (.4) G B :m :W η F()- F()- η ρ ρ d F W d d m g g η ρ ρ d d m g g (.5) a (.5) Laplac
PowerPoint プレゼンテーション
 自家用座学資料機体の性能と運用限界 公益財団法人日本学生航空連盟 2011 年 6 月作成 最終改定 2018 年 2 月 1 運動包囲線図 n 制限運動荷重倍数 A n1 D + 正の失速 n2 Vsl Va Vd 飛行速度 V 曲技 A 実用 U n1 7.0 5.3 n2 7.0 4.0 n3 5.0 1.5 n4 5.0 2.65 負の失速 n4 n3 Va までは大きな操作でも 制限荷重倍数を超えない
自家用座学資料機体の性能と運用限界 公益財団法人日本学生航空連盟 2011 年 6 月作成 最終改定 2018 年 2 月 1 運動包囲線図 n 制限運動荷重倍数 A n1 D + 正の失速 n2 Vsl Va Vd 飛行速度 V 曲技 A 実用 U n1 7.0 5.3 n2 7.0 4.0 n3 5.0 1.5 n4 5.0 2.65 負の失速 n4 n3 Va までは大きな操作でも 制限荷重倍数を超えない
5 c P 5 kn n t π (.5 P 7 MP π (.5 n t n cos π. MP 6 4 t sin π 6 cos π 6.7 MP 4 P P N i i i i N i j F j ii N i i ii F j i i N ii li i F j i ij li i i i
 i j ij i j ii,, i j ij ij ij (, P P P P θ N θ P P cosθ N F N P cosθ F Psinθ P P F P P θ N P cos θ cos θ cosθ F P sinθ cosθ sinθ cosθ sinθ 5 c P 5 kn n t π (.5 P 7 MP π (.5 n t n cos π. MP 6 4 t sin π 6
i j ij i j ii,, i j ij ij ij (, P P P P θ N θ P P cosθ N F N P cosθ F Psinθ P P F P P θ N P cos θ cos θ cosθ F P sinθ cosθ sinθ cosθ sinθ 5 c P 5 kn n t π (.5 P 7 MP π (.5 n t n cos π. MP 6 4 t sin π 6
Microsoft Word - 微分入門.doc
 基本公式 例題 0 定義式 f( ) 数 Ⅲ 微分入門 = の導関数を定義式にもとづいて計算しなさい 基本事項 ( f( ), g( ) が微分可能ならば ) y= f( ) g( ) のとき, y = y= f( ) g( ) h( ) のとき, y = ( f( ), g( ) が微分可能で, g( ) 0 ならば ) f( ) y = のとき, y = g ( ) とくに, y = のとき,
基本公式 例題 0 定義式 f( ) 数 Ⅲ 微分入門 = の導関数を定義式にもとづいて計算しなさい 基本事項 ( f( ), g( ) が微分可能ならば ) y= f( ) g( ) のとき, y = y= f( ) g( ) h( ) のとき, y = ( f( ), g( ) が微分可能で, g( ) 0 ならば ) f( ) y = のとき, y = g ( ) とくに, y = のとき,
平成15年度 航空機等の機械工業動向調査事業
 ( 公財 ) 航空機国際共同開発促進基金 解説概要 16-4-1 この解説概要に対するアンケートにご協力ください エアバス A350 について 1 背景エアバスは 2004 年 12 月 10 日に ボーイング B787 の対抗馬としての A350 に関する Authorization To Offer( 以下 ATO) を得て 近い将来のローンチを目指して ローンチ候補エアラインへの提案 受注活動を積極的に行っている
( 公財 ) 航空機国際共同開発促進基金 解説概要 16-4-1 この解説概要に対するアンケートにご協力ください エアバス A350 について 1 背景エアバスは 2004 年 12 月 10 日に ボーイング B787 の対抗馬としての A350 に関する Authorization To Offer( 以下 ATO) を得て 近い将来のローンチを目指して ローンチ候補エアラインへの提案 受注活動を積極的に行っている
( ) 2.1. C. (1) x 4 dx = 1 5 x5 + C 1 (2) x dx = x 2 dx = x 1 + C = 1 2 x + C xdx (3) = x dx = 3 x C (4) (x + 1) 3 dx = (x 3 + 3x 2 + 3x +
 2.1. C. (1) x 4 dx = 1 5 x5 + C 1 (2) x dx = x 2 dx = x 1 + C = 1 2 x + C xdx (3) = x dx = 3 x C (4) (x + 1) 3 dx = (x 3 + 3x 2 + 3x +") (.. C. ( d 5 5 + C ( d d + C + C d ( d + C ( ( + d ( + + + d + + + + C (5 9 + d + d tan + C cos (sin (6 sin d d log sin + C sin + (7 + + d ( + + + + d log( + + + C ( (8 d 7 6 d + 6 + C ( (9 ( d 6 + 8 d
(.. C. ( d 5 5 + C ( d d + C + C d ( d + C ( ( + d ( + + + d + + + + C (5 9 + d + d tan + C cos (sin (6 sin d d log sin + C sin + (7 + + d ( + + + + d log( + + + C ( (8 d 7 6 d + 6 + C ( (9 ( d 6 + 8 d