2010 : M DCG 3 (3DCG) 3DCG 3DCG 3DCG S
|
|
|
- あいね いのら
- 9 years ago
- Views:
Transcription
1 2010 M
2 2010 : M DCG 3 (3DCG) 3DCG 3DCG 3DCG S
 DCG")
3 I
4 1.1 (Wikipedia ) II

5 ( 3DCG) 3DCG [1][2][3][4] 3DCG [5][6][7] 1
![[1][2][3][4]](/docs-images/41/22665908/images/page_5.jpg "3DCG")
 2 [8] 2003")
6 : (Wikipedia ) 2 [8] 2003 Baranoski [9] ( ) [10] ( ) 2
![2 [8] 2003](/docs-images/41/22665908/images/page_6.jpg "Baranoski [9] (")
7 2005 Baranoski [11] Baranoski S ( ) [12] 1/f [13] 3 1/f 1/f 1/f [14] 3DCG 3
![) [12] 1/f [13] 3](/docs-images/41/22665908/images/page_7.jpg "1/f 1/f 1/f [14]")
8 Baranosoki Bèzier [15] sin Baranosoki

9 2 2 [5] ( ) 80km 500km 5
 80km")
10 : 3 U J
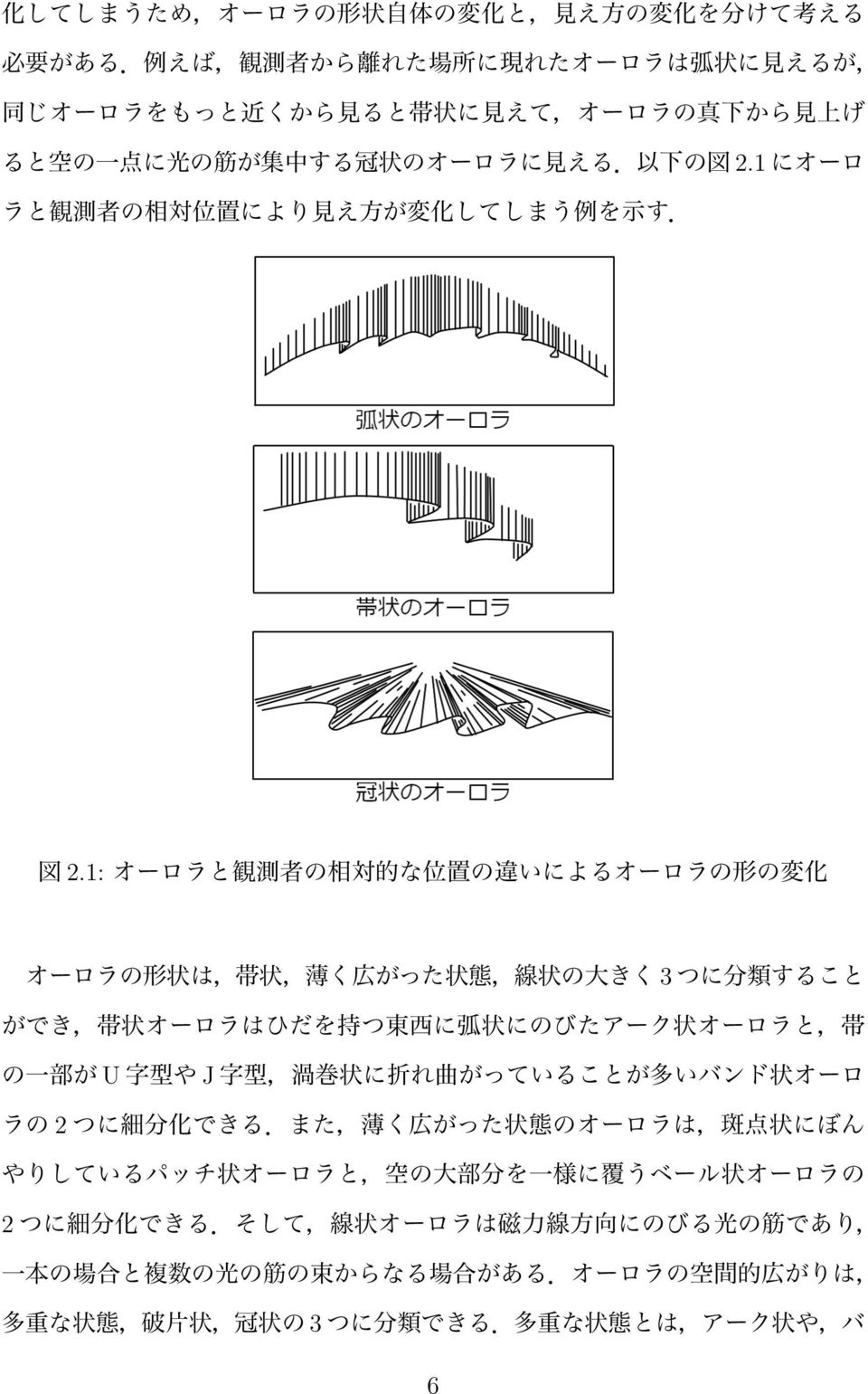
11 % ( 7
12 ) ( ) ( ) : 2.2 1km km 8

13 S km km 2km 10km 20km 1500km S km km/s ( )

14 50km 100km m/s 50km/s 100km/s : 10

15 2.4: 2.5: 2.6: 11
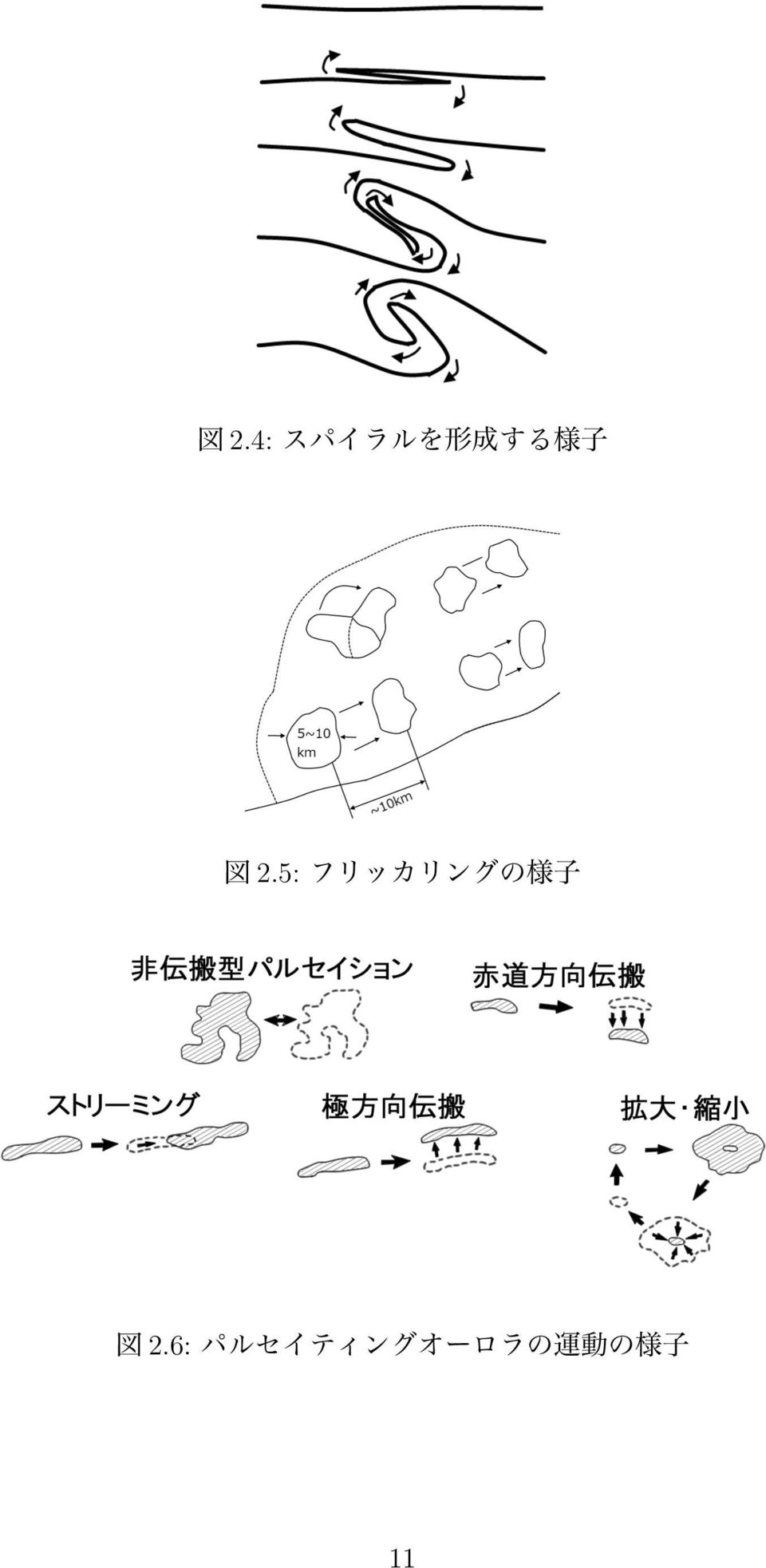
16 nm 630.0nm 391.4nm 427.8nm 670.5nm 630.0nm nm a b c d e f 6 a 120km 140km b 80km 100km c 100km 200km d 220km 250km e b 12

17 f


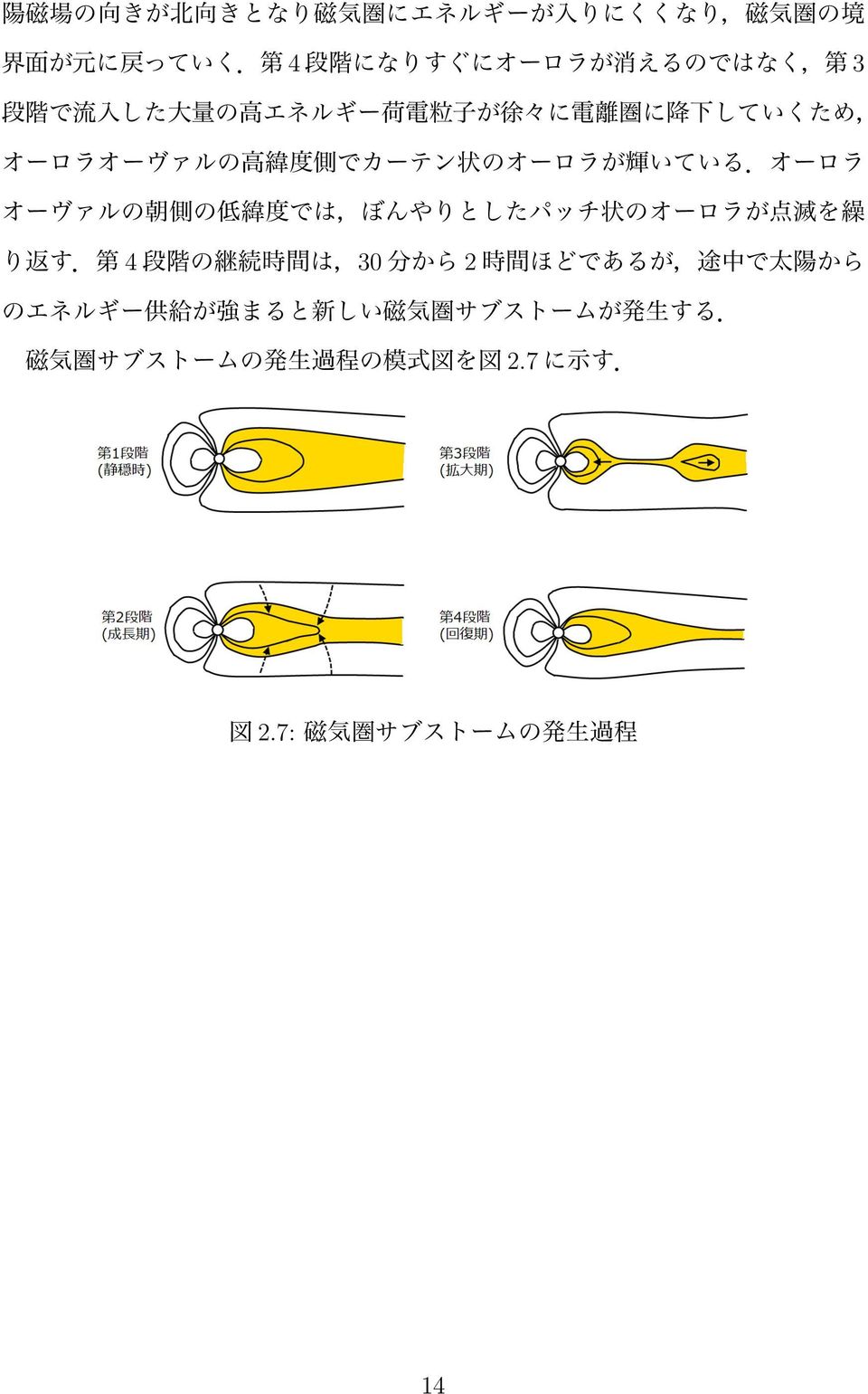
18 : 14
19 DCG y xz xz Bèzier [15] sin n Bèzier m sin R(t) (3.1) R(t) = n Bi n (t)q i + i=0 { m 1 j=0 A j sin(2πf j t) } N b (t) (0 t 1) (3.1) 15
![1 3DCG y xz xz Bèzier [15] sin n Bèzier m](/docs-images/41/22665908/images/page_19.jpg "sin R(t) (3.")
20 N b (t) Bèzier t Q i Bèzier {Q 0, Q 1, Q 2,..., Q n } Bi n (t) Bernstein A j sin f j sin Bernstein (3.2) B n i (t) = n C i t i (1 t) n i (3.2) t k {W 0, W 1, W 2,..., W k 1 } (3.3) w W 0 (k = 1) 2 W (t, w) = w W tk (1 (tk tk ))+W tk +1 (tk tk ) (k 1, 0 t < 1) 2 w W k 2 (k 1, t = 1) (3.3) 1 w 1 tk tk (3.1) (3.3) A(t, w) (3.4) A(t, w) = R(t) + W (t, w)n a (t) (0 t 1, 1 w 1) (3.4) N a (t) t 3.2 [16] F P 0 v 0 t P 16
 (3.3) 1 w 1 tk tk (3.1) (3.3) A(t, w) (3.4) A(t, w) = R(t) + W (t, w)n a (t) (0 t 1, 1 w 1) (3.")
21 (3.5) P = ( ) t m F + v 0 t + P 0 (3.5) q 0 B E F (3.6) v B F = q 0 (E + v B) (3.6) B q 0 1 E φ E (3.7) E = φ (3.7) S N ρ (3.8) ρ = q 0N S (3.8) ε 0 ε 0 φ ρ [17][18] (3.9) 2 2 φ = 2 φ 2 x + 2 φ 2 z = ρ ε 0 (3.9) φ xz Drichlet [18] φ = 0 Gauss-Seidel [19] φ xz 17
22 4 4 4 d (i, j) 2 [18] (i, j) 2 (3.10) (3.11) ( ) 2 φ x 2 φ(i + 1, j) 2φ(i, j) + φ(i 1, j) ( d) 2 (3.10) ( ) 2 φ z 2 φ(i, j + 1) 2φ(i, j) + φ(i, j 1) ( d) 2 (3.11) (3.9) (3.10) (3.11) (i, j) φ(i, j) (3.12) φ(i, j) = 1 4 { ( d) 2 ρ ε 0 } + φ(i + d, j) + φ(i d, j) + φ(i, j + l) + φ(i, j d) (3.12) [18] (i, j) E(i, j) E(i, j) = ( φ(i + 1, j) φ(i 1, j), 2 d ) φ(i, j + 1) φ(i, j 1) 2 d (3.13) 3.3 [20] 18
23 B v t t t t t P (3.14) P = v B B t (3.14) r l n l [21] P 1 (3.15) P 1 = nπr 2 l (3.15) n 3.4 [22] [5] r n v m t t [21] P 2 (3.16) ( P 2 = 1 exp ) 2nπr 2 v m t (3.16) v m [23] 19
24 3.5 [24] σ (3.17) G(x, y) = 1 ) ( 2πσ exp x2 + y 2 2 2σ 2 (3.17) σ RGB CIE-XYZ X, Y, Z [25] λ L(λ) X, Y, Z (3.18) 780 X = k Y = k Z = k x(λ)l(λ)δλ ȳ(λ)l(λ)δλ z(λ)l(λ)δλ (3.18) x, ȳ, z k L(λ) 20
25 X, Y, Z R, G, B (3.19) ( X Y Z R = ( X Y Z G = ( X Y Z B = ) ) ) (3.19) 21
26 4 3 3D FK ToolKit System[26] 512px 360px : OS Windows 7 Enterprise CPU AMD Phenom(tm) IIX6 1090T Processor 3.20 GHz GPU GeForce GTX GB

27 4.1: : 1 4.3:

28 4.4: 3 4.5: 4 4.6: 5 4.7: 1 24

29 4.8: 2 4.9: : : S 25
30 26
31 5 27
32 28
33 [1] Yoshinobu Takahiro and Kaneda Kazufumi. Rendering rainbows based on wave optics and compositing the rainbow and photographs.. ITS, Vol. 104, No. 647, pp , [2] Yoshinori Dobashi, Tsuyoshi Yamamoto, and Tomoyuki Nishita. Efficient rendering of lightning taking into account scattering effects due to cloud and atmospheric particles. In Proceedings of the 9th Pacific Conference on Computer Graphics and Applications, PG 01, pp. 390, [3] TOKOI KOHE and MORIKI HIRONORI. Real-time modeling of snowcovered shape(computer graphics). Transactions of Information Processing Society of Japan, Vol. 47, No. 5, pp , [4] Ye Zhao, Yiping Han, Zhe Fan, Feng Qiu, Yu-Chuan Kuo, Arie E. Kaufman, and Klaus Mueller. Visual simulation of heat shimmering and mirage. IEEE Transactions on Visualization and Computer Graphics, Vol. 13, pp , [5]. 2., [6]. THE AURORA WATCHER S HANDBOOK.,
34 [7].., [8]. CG. NICOGRAPH 95, pp , [9] G. V. G. Baranoski, Jon Rokne, Peter Shirley, Trond Trondsen, Rui Bastos. Simulating the aurora. Visual. Comput. Animat, pp , [10] , pp , [11] G. V. G. Baranoski J. Wan. Simulating the dynamics of auroral phenomena. ACM Transactions on Graphics, Vol. 24, pp , [12]. CG. 20, p. 137, [13]. CG. 21, p. 281, [14]... CAD, [15]. 3 CAD., [16]. [ 2]., [17]. 14., [18]..,
35 [19]. UNIX & Informatioin Science-5 C., [20]. 23., [21]. 2.., Vol. 47, No. 1, pp. 2 6, [22] NASA, Robert McGuire. MSIS-E-90 Atmosphere Model. gsfc.nasa.gov/vitmo/msis vitmo.html. [23]. 1.., Vol. 46, No. 4, pp , [24] Gabriele Lohmann. 3 Volumetric Image Analysis., [25].., [26]. Fine Kernel Tool Kit System. jp/. 31
1 3 (3DCG) [1] [2] [3] [4] [5] 3DCG [6] [7] [8] [9] ( ) 3DCG 27 NICOGRAPH [10] [6] ( ) [7] 80km 500km 1 1: 25
![1 3 (3DCG) [1] [2] [3] [4] [5] 3DCG [6] [7] [8] [9] ( ) 3DCG 27 NICOGRAPH [10] [6] ( ) [7] 80km 500km 1 1: 25](/thumbs/64/50631867.jpg "1 3 (3DCG) [1] [2] [3] [4] [5] 3DCG [6] [7] [8] [9] ( ) 3DCG 27 NICOGRAPH [10] [6] ( ) [7] 80km 500km 1 1: 25") Visual Simulation of Aurora based on Feature Motion Takafumi Kojima Ryota Takeuchi Taichi Watanabe Koji Mikami Graduate School of Bionics, Computer and Media Sciences, Tokyo University of Technology School
Visual Simulation of Aurora based on Feature Motion Takafumi Kojima Ryota Takeuchi Taichi Watanabe Koji Mikami Graduate School of Bionics, Computer and Media Sciences, Tokyo University of Technology School
2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG
 2009 3DCG M0106423 2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG 1 1 1.1................................. 1 1.2................................. 1 1.3............................... 3 1.4.................................
2009 3DCG M0106423 2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG 1 1 1.1................................. 1 1.2................................. 1 1.3............................... 3 1.4.................................
1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D
![1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D](/thumbs/91/105248386.jpg "1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D") 3DCG 1) ( ) 2) 2) 1) 2) Real-Time Line Drawing Using Image Processing and Deforming Process Together in 3DCG Takeshi Okuya 1) Katsuaki Tanaka 2) Shigekazu Sakai 2) 1) Department of Intermedia Art and Science,
3DCG 1) ( ) 2) 2) 1) 2) Real-Time Line Drawing Using Image Processing and Deforming Process Together in 3DCG Takeshi Okuya 1) Katsuaki Tanaka 2) Shigekazu Sakai 2) 1) Department of Intermedia Art and Science,
2013 M
 2013 M0110213 2013 : M0110213 3DCG 3DCG 3DCG 2D 3DCG 2D 1 1 3DCG 3D 1 1 1.1............................ 1 1.2............................... 10 2 11 2.1......................... 11 3 16 3.1..........................
2013 M0110213 2013 : M0110213 3DCG 3DCG 3DCG 2D 3DCG 2D 1 1 3DCG 3D 1 1 1.1............................ 1 1.2............................... 10 2 11 2.1......................... 11 3 16 3.1..........................
07-二村幸孝・出口大輔.indd
 GPU Graphics Processing Units HPC High Performance Computing GPU GPGPU General-Purpose computation on GPU CPU GPU GPU *1 Intel Quad-Core Xeon E5472 3.0 GHz 2 6 MB L2 cache 1600 MHz FSB 80 GFlops 1 nvidia
GPU Graphics Processing Units HPC High Performance Computing GPU GPGPU General-Purpose computation on GPU CPU GPU GPU *1 Intel Quad-Core Xeon E5472 3.0 GHz 2 6 MB L2 cache 1600 MHz FSB 80 GFlops 1 nvidia
FIT2013( 第 12 回情報科学技術フォーラム ) I-032 Acceleration of Adaptive Bilateral Filter base on Spatial Decomposition and Symmetry of Weights 1. Taiki Makishi Ch
 I-032 Acceleration of Adaptive Bilateral Filter base on Spatial Decomposition and Symmetry of Weights 1. Taiki Makishi Ch") I-032 Acceleration of Adaptive Bilateral Filter base on Spatial Decomposition and Symmetry of Weights 1. Taiki Makishi Chikatoshi Yamada Shuichi Ichikawa Gaussian Filter GF GF Bilateral Filter BF CG [1]
I-032 Acceleration of Adaptive Bilateral Filter base on Spatial Decomposition and Symmetry of Weights 1. Taiki Makishi Chikatoshi Yamada Shuichi Ichikawa Gaussian Filter GF GF Bilateral Filter BF CG [1]
IPSJ SIG Technical Report Vol.2012-CG-148 No /8/29 3DCG 1,a) On rigid body animation taking into account the 3D computer graphics came
 On rigid body animation taking into account the 3D computer graphics came") 3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
3D VR CAD 3D CAD CAD [1] CAD 3DCG [2] [3] CAD 3D NC CG [4] Ccurve XY C curve α C curve [5], [6], [7], [8], [9] 2 [10] 1 [11], [12] 2.2 [13] Tcu
![3D VR CAD 3D CAD CAD [1] CAD 3DCG [2] [3] CAD 3D NC CG [4] Ccurve XY C curve α C curve [5], [6], [7], [8], [9] 2 [10] 1 [11], [12] 2.2 [13] Tcu](/thumbs/92/109954609.jpg "3D VR CAD 3D CAD CAD [1] CAD 3DCG [2] [3] CAD 3D NC CG [4] Ccurve XY C curve α C curve [5], [6], [7], [8], [9] 2 [10] 1 [11], [12] 2.2 [13] Tcu") 1,a) 2 2 2011 10 21, 2012 5 12 A Study of Simulating Log-aesthetic Curved Surfaces under Various Light Source Environments with Augmented Reality Ryo Hirano 1,a) Toshinobu Harada 2 Kohe Tokoi 2 Received:
1,a) 2 2 2011 10 21, 2012 5 12 A Study of Simulating Log-aesthetic Curved Surfaces under Various Light Source Environments with Augmented Reality Ryo Hirano 1,a) Toshinobu Harada 2 Kohe Tokoi 2 Received:
Lyra 2 2 2 X Y X Y ivis Designer Lyra ivisdesigner Lyra ivisdesigner 2 ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 5 ) (1) (2) (3) (4) (5) Iv Studio [8] 3 (5) (4) (1) (
![Lyra 2 2 2 X Y X Y ivis Designer Lyra ivisdesigner Lyra ivisdesigner 2 ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 5 ) (1) (2) (3) (4) (5) Iv Studio [8] 3 (5) (4) (1) (](/thumbs/42/23098909.jpg "Lyra 2 2 2 X Y X Y ivis Designer Lyra ivisdesigner Lyra ivisdesigner 2 ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 5 ) (1) (2) (3) (4) (5) Iv Studio [8] 3 (5) (4) (1) (") 1,a) 2,b) 2,c) 1. Web [1][2][3][4] [5] 1 2 a) [email protected] b) [email protected] c) [email protected] [6] Lyra[5] ivisdesigner[6] [7] 2 Lyra ivisdesigner c 2012 Information Processing
1,a) 2,b) 2,c) 1. Web [1][2][3][4] [5] 1 2 a) [email protected] b) [email protected] c) [email protected] [6] Lyra[5] ivisdesigner[6] [7] 2 Lyra ivisdesigner c 2012 Information Processing
2). 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055
. 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055") 1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s
![(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s](/thumbs/75/72066128.jpg "(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s") 1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
Input image Initialize variables Loop for period of oscillation Update height map Make shade image Change property of image Output image Change time L
 1,a) 1,b) 1/f β Generation Method of Animation from Pictures with Natural Flicker Abstract: Some methods to create animation automatically from one picture have been proposed. There is a method that gives
1,a) 1,b) 1/f β Generation Method of Animation from Pictures with Natural Flicker Abstract: Some methods to create animation automatically from one picture have been proposed. There is a method that gives
DEIM Forum 2012 E Web Extracting Modification of Objec
 DEIM Forum 2012 E4-2 670 0092 1 1 12 E-mail: [email protected], {dkitayama,sumiya}@shse.u-hyogo.ac.jp Web Extracting Modification of Objects for Supporting Map Browsing Junki MATSUO, Daisuke
DEIM Forum 2012 E4-2 670 0092 1 1 12 E-mail: [email protected], {dkitayama,sumiya}@shse.u-hyogo.ac.jp Web Extracting Modification of Objects for Supporting Map Browsing Junki MATSUO, Daisuke
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2013-CVIM-188 No /9/3 BRDF i
 BRDF E-mail: {yoshie,ki}@cvl.iis.u-tokyo.ac.jp, [email protected], [email protected], [email protected] 2 CG 1 BRDF 1. (BRDF) BRDF Lambert Oren-Nayar [1] Phong [2] Blinn [3] Ward
BRDF E-mail: {yoshie,ki}@cvl.iis.u-tokyo.ac.jp, [email protected], [email protected], [email protected] 2 CG 1 BRDF 1. (BRDF) BRDF Lambert Oren-Nayar [1] Phong [2] Blinn [3] Ward
258 5) GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System
 GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System") Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +
![1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +](/thumbs/81/83701592.jpg "1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +") 3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
2 3 5 5 5 5 6 6 7 7 8 10 10 10 10 11 11 12 12 13 16 16 16 16 17 19 21 21 22 5
 1D000425-2 1 2 3 5 5 5 5 6 6 7 7 8 10 10 10 10 11 11 12 12 13 16 16 16 16 17 19 21 21 22 5 3 29 29 29 30 31 31 32 35 35 35 36 41 41 41 46 48 48 48 52 57 4 700 13 1988 4 5 4 5 21 1 1 3 4 5 6 21 10 1888
1D000425-2 1 2 3 5 5 5 5 6 6 7 7 8 10 10 10 10 11 11 12 12 13 16 16 16 16 17 19 21 21 22 5 3 29 29 29 30 31 31 32 35 35 35 36 41 41 41 46 48 48 48 52 57 4 700 13 1988 4 5 4 5 21 1 1 3 4 5 6 21 10 1888
経済論集 46‐2(よこ)(P)☆/2.三崎
(P)☆/2.三崎") 1 2 1869 11 17 5 10 1 3 1914 5 15 5 1872 9 12 3 1870 1 26 14 1881 11 11 12 6 11 1878 5 9 13 1880 6 17 1 15 1882 1 2 3 11 1828 2 26 24 1891 4 22 2 1849 12 1 3 1856 pp 20 21. 1971 p.429. 1973 1, pp.440 444.
1 2 1869 11 17 5 10 1 3 1914 5 15 5 1872 9 12 3 1870 1 26 14 1881 11 11 12 6 11 1878 5 9 13 1880 6 17 1 15 1882 1 2 3 11 1828 2 26 24 1891 4 22 2 1849 12 1 3 1856 pp 20 21. 1971 p.429. 1973 1, pp.440 444.
DEIM Forum 2017 H ,
 DEIM Forum 217 H5-4 113 8656 7 3 1 153 855 4 6 1 3 2 1 2 E-mail: {satoyuki,haya,kgoda,kitsure}@tkl.iis.u-tokyo.ac.jp,.,,.,,.,, 1.. 1956., IBM IBM RAMAC 35 IBM 35 24 5, 5MB. 1961 IBM 131,,, IBM 35 13.,
DEIM Forum 217 H5-4 113 8656 7 3 1 153 855 4 6 1 3 2 1 2 E-mail: {satoyuki,haya,kgoda,kitsure}@tkl.iis.u-tokyo.ac.jp,.,,.,,.,, 1.. 1956., IBM IBM RAMAC 35 IBM 35 24 5, 5MB. 1961 IBM 131,,, IBM 35 13.,
3 Adobe Photoshop CS6 Photoshop CS6 CS6 CS6 Photoshop CS6 24 Photoshop CS6 13 Adobe Mercury Graphics Engine CS6 Photoshop 3D CS6 Photoshop CS6 2
 Adobe Photoshop CS6 HANDBOOK COMMERCIAL PHOTO 2012 年 7 月号より抜粋 3 Adobe Photoshop CS6 Photoshop CS6 CS6 CS6 Photoshop CS6 24 Photoshop CS6 13 Adobe Mercury Graphics Engine CS6 Photoshop 3D CS6 Photoshop
Adobe Photoshop CS6 HANDBOOK COMMERCIAL PHOTO 2012 年 7 月号より抜粋 3 Adobe Photoshop CS6 Photoshop CS6 CS6 CS6 Photoshop CS6 24 Photoshop CS6 13 Adobe Mercury Graphics Engine CS6 Photoshop 3D CS6 Photoshop
-1-1 1 1 1 1 12 31 2 2 3 4
 2007 -1-1 1 1 1 1 12 31 2 2 3 4 -2-5 6 CPU 3 Windows98 1 -3-2. 3. -4-4 2 5 1 1 1 -5- 50000 50000 50000 50000 50000 50000 50000 50000 50000 50000-6- -7-1 Windows 2 -8-1 2 3 4 - - 100,000 200,000 500,000
2007 -1-1 1 1 1 1 12 31 2 2 3 4 -2-5 6 CPU 3 Windows98 1 -3-2. 3. -4-4 2 5 1 1 1 -5- 50000 50000 50000 50000 50000 50000 50000 50000 50000 50000-6- -7-1 Windows 2 -8-1 2 3 4 - - 100,000 200,000 500,000
xx/xx Vol. Jxx A No. xx 1 Fig. 1 PAL(Panoramic Annular Lens) PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL
 PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL") PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
IPSJ SIG Technical Report Vol.2013-CE-122 No.16 Vol.2013-CLE-11 No /12/14 Android 1,a) 1 1 GPS LAN 2 LAN Android,,, Android, HTML5 LAN 1. ICT(I
 1 1 GPS LAN 2 LAN Android,,, Android, HTML5 LAN 1. ICT(I") Android 1,a) 1 1 GPS LAN 2 LAN Android,,, Android, HTML5 LAN 1. ICT(Information and Communication Technology) (Google [2] [5] ) 2. Google 2.1 Google Google [2]( 1) Google Web, Google Web Google Chrome
Android 1,a) 1 1 GPS LAN 2 LAN Android,,, Android, HTML5 LAN 1. ICT(Information and Communication Technology) (Google [2] [5] ) 2. Google 2.1 Google Google [2]( 1) Google Web, Google Web Google Chrome
Microsoft Word - 21年仕様書案0905011600.doc
 Computer System in General Information Processing Ce nter 21 4 April,2009 ShinshuUniversity 1 ( ) ( ) ( 2 3 - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - 1-4 1-4-1 1-4-1-1 Thin 1-4-1-2 1-4-2 1-4-2-1
Computer System in General Information Processing Ce nter 21 4 April,2009 ShinshuUniversity 1 ( ) ( ) ( 2 3 - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - 1-4 1-4-1 1-4-1-1 Thin 1-4-1-2 1-4-2 1-4-2-1
(4) ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)
 ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)") (MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, [email protected], [email protected],
(MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, [email protected], [email protected],
Dynamics and Design Conference 2004
 Dynamics & Design Conference 2004 2004 9 27 30 Dynamics & Design Conference 23 2 3 Dynamics & Design Conference 2004 Dynamics & Design Conference 2004 D&D2004 15,000 9,000 23,000 3,000 5,000 D&D2004 CD-ROM
Dynamics & Design Conference 2004 2004 9 27 30 Dynamics & Design Conference 23 2 3 Dynamics & Design Conference 2004 Dynamics & Design Conference 2004 D&D2004 15,000 9,000 23,000 3,000 5,000 D&D2004 CD-ROM

Izard 10 [1]Plutchik 8 [2] [3] Izard Neviarouskaya [4][5] 2.2 Hao [6] 1 Twitter[a] a) Shook Wikipedia
![Izard 10 [1]Plutchik 8 [2] [3] Izard Neviarouskaya [4][5] 2.2 Hao [6] 1 Twitter[a] a) Shook Wikipedia](/thumbs/76/74386738.jpg "Izard 10 [1]Plutchik 8 [2] [3] Izard Neviarouskaya [4][5] 2.2 Hao [6] 1 Twitter[a] a) Shook Wikipedia") 1 2 2 2 Visualization for Spatiotemporal Distribution of People's Rich Emotions KIYOHISA TAGUCHI 1 KAZUO MISUE 2 JIRO TANAKA 2 To grasp spatiotemporal changes of rich emotions for a large number of people,
1 2 2 2 Visualization for Spatiotemporal Distribution of People's Rich Emotions KIYOHISA TAGUCHI 1 KAZUO MISUE 2 JIRO TANAKA 2 To grasp spatiotemporal changes of rich emotions for a large number of people,
,., ping - RTT,., [2],RTT TCP [3] [4] Android.Android,.,,. LAN ACK. [5].. 3., 1.,. 3 AI.,,Amazon, (NN),, 1..NN,, (RNN) RNN
![,., ping - RTT,., [2],RTT TCP [3] [4] Android.Android,.,,. LAN ACK. [5].. 3., 1.,. 3 AI.,,Amazon, (NN),, 1..NN,, (RNN) RNN](/thumbs/91/105260962.jpg ",., ping - RTT,., [2],RTT TCP [3] [4] Android.Android,.,,. LAN ACK. [5].. 3., 1.,. 3 AI.,,Amazon, (NN),, 1..NN,, (RNN) RNN") DEIM Forum 2018 F1-1 LAN LSTM 112 8610 2-1-1 163-8677 1-24-2 E-mail: [email protected], [email protected], [email protected],,.,,., LAN,. Android LAN,. LSTM LAN., LSTM, Analysis of Packet of
DEIM Forum 2018 F1-1 LAN LSTM 112 8610 2-1-1 163-8677 1-24-2 E-mail: [email protected], [email protected], [email protected],,.,,., LAN,. Android LAN,. LSTM LAN., LSTM, Analysis of Packet of
3.1 Thalmic Lab Myo * Bluetooth PC Myo 8 RMS RMS t RMS(t) i (i = 1, 2,, 8) 8 SVM libsvm *2 ν-svm 1 Myo 2 8 RMS 3.2 Myo (Root
 i (i = 1, 2,, 8) 8 SVM libsvm *2 ν-svm 1 Myo 2 8 RMS 3.2 Myo (Root") 1,a) 2 2 1. 1 College of Information Science, School of Informatics, University of Tsukuba 2 Faculty of Engineering, Information and Systems, University of Tsukuba a) [email protected] 2.
1,a) 2 2 1. 1 College of Information Science, School of Informatics, University of Tsukuba 2 Faculty of Engineering, Information and Systems, University of Tsukuba a) [email protected] 2.
Run-Based Trieから構成される 決定木の枝刈り法
 Run-Based Trie 2 2 25 6 Run-Based Trie Simple Search Run-Based Trie Network A Network B Packet Router Packet Filtering Policy Rule Network A, K Network B Network C, D Action Permit Deny Permit Network
Run-Based Trie 2 2 25 6 Run-Based Trie Simple Search Run-Based Trie Network A Network B Packet Router Packet Filtering Policy Rule Network A, K Network B Network C, D Action Permit Deny Permit Network
23 Fig. 2: hwmodulev2 3. Reconfigurable HPC 3.1 hw/sw hw/sw hw/sw FPGA PC FPGA PC FPGA HPC FPGA FPGA hw/sw hw/sw hw- Module FPGA hwmodule hw/sw FPGA h
 23 FPGA CUDA Performance Comparison of FPGA Array with CUDA on Poisson Equation ([email protected]), ([email protected]), ([email protected]), ([email protected]),
23 FPGA CUDA Performance Comparison of FPGA Array with CUDA on Poisson Equation ([email protected]), ([email protected]), ([email protected]), ([email protected]),
2 3, 4, 5 6 2. [1] [2] [3]., [4], () [3], [5]. Mel Frequency Cepstral Coefficients (MFCC) [9] Logan [4] MFCC MFCC Flexer [10] Bogdanov2010 [3] [14],,,
![2 3, 4, 5 6 2. [1] [2] [3]., [4], () [3], [5]. Mel Frequency Cepstral Coefficients (MFCC) [9] Logan [4] MFCC MFCC Flexer [10] Bogdanov2010 [3] [14],,,](/thumbs/40/20501376.jpg "2 3, 4, 5 6 2. [1] [2] [3]., [4], () [3], [5]. Mel Frequency Cepstral Coefficients (MFCC) [9] Logan [4] MFCC MFCC Flexer [10] Bogdanov2010 [3] [14],,,") DEIM Forum 2016 E1-4 525-8577 1 1-1 E-mail: [email protected], [email protected], [email protected] 373 1.,, itunes Store 1, Web,., 4,300., [1], [2] [3],,, [4], ( ) [3], [5].,,.,,,,
DEIM Forum 2016 E1-4 525-8577 1 1-1 E-mail: [email protected], [email protected], [email protected] 373 1.,, itunes Store 1, Web,., 4,300., [1], [2] [3],,, [4], ( ) [3], [5].,,.,,,,
GPU n Graphics Processing Unit CG CAD
 GPU 2016/06/27 第 20 回 GPU コンピューティング講習会 ( 東京工業大学 ) 1 GPU n Graphics Processing Unit CG CAD www.nvidia.co.jp www.autodesk.co.jp www.pixar.com GPU n GPU ü n NVIDIA CUDA ü NVIDIA GPU ü OS Linux, Windows, Mac
GPU 2016/06/27 第 20 回 GPU コンピューティング講習会 ( 東京工業大学 ) 1 GPU n Graphics Processing Unit CG CAD www.nvidia.co.jp www.autodesk.co.jp www.pixar.com GPU n GPU ü n NVIDIA CUDA ü NVIDIA GPU ü OS Linux, Windows, Mac
Fuzzy Multiple Discrimminant Analysis (FMDA) 5) (SOM) 6) SOM 3 6) SOM SOM SOM SOM SOM SOM 7) 8) SOM SOM SOM GPU 2. n k f(x) m g(x) (1) 12) { min(max)
 5) (SOM) 6) SOM 3 6) SOM SOM SOM SOM SOM SOM 7) 8) SOM SOM SOM GPU 2. n k f(x) m g(x) (1) 12) { min(max)") SOM 1 2 2 3 1 (SOM: Self-Organizing Maps) 3 SOM SOM SOM SOM GPU A Study on Visualization of Pareto Solutions by Spherical Self-Organizing Maps MASATO YOSHIMI, 1 KANAME NISHIMOTO, 2 LUYI WANG, 2 TOMOYUKI
SOM 1 2 2 3 1 (SOM: Self-Organizing Maps) 3 SOM SOM SOM SOM GPU A Study on Visualization of Pareto Solutions by Spherical Self-Organizing Maps MASATO YOSHIMI, 1 KANAME NISHIMOTO, 2 LUYI WANG, 2 TOMOYUKI
1 GPU GPGPU GPU CPU 2 GPU 2007 NVIDIA GPGPU CUDA[3] GPGPU CUDA GPGPU CUDA GPGPU GPU GPU GPU Graphics Processing Unit LSI LSI CPU ( ) DRAM GPU LSI GPU
![1 GPU GPGPU GPU CPU 2 GPU 2007 NVIDIA GPGPU CUDA[3] GPGPU CUDA GPGPU CUDA GPGPU GPU GPU GPU Graphics Processing Unit LSI LSI CPU ( ) DRAM GPU LSI GPU](/thumbs/89/99132402.jpg "1 GPU GPGPU GPU CPU 2 GPU 2007 NVIDIA GPGPU CUDA[3] GPGPU CUDA GPGPU CUDA GPGPU GPU GPU GPU Graphics Processing Unit LSI LSI CPU ( ) DRAM GPU LSI GPU") GPGPU (I) GPU GPGPU 1 GPU(Graphics Processing Unit) GPU GPGPU(General-Purpose computing on GPUs) GPU GPGPU GPU ( PC ) PC PC GPU PC PC GPU GPU 2008 TSUBAME NVIDIA GPU(Tesla S1070) TOP500 29 [1] 2009 AMD
GPGPU (I) GPU GPGPU 1 GPU(Graphics Processing Unit) GPU GPGPU(General-Purpose computing on GPUs) GPU GPGPU GPU ( PC ) PC PC GPU PC PC GPU GPU 2008 TSUBAME NVIDIA GPU(Tesla S1070) TOP500 29 [1] 2009 AMD
GUI(Graphical User Interface) GUI CLI(Command Line Interface) GUI
 GUI CLI(Command Line Interface) GUI") 24 GUI(Graphical User Interface) GUI CLI(Command Line Interface) GUI 1 1 1.1 GUI................................... 1 1.2 GUI.................... 1 1.2.1.......................... 1 1.2.2...........................
24 GUI(Graphical User Interface) GUI CLI(Command Line Interface) GUI 1 1 1.1 GUI................................... 1 1.2 GUI.................... 1 1.2.1.......................... 1 1.2.2...........................
GPGPU
 GPGPU 2013 1008 2015 1 23 Abstract In recent years, with the advance of microscope technology, the alive cells have been able to observe. On the other hand, from the standpoint of image processing, the
GPGPU 2013 1008 2015 1 23 Abstract In recent years, with the advance of microscope technology, the alive cells have been able to observe. On the other hand, from the standpoint of image processing, the
 1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15. 1. 2. 3. 16 17 18 ( ) ( 19 ( ) CG PC 20 ) I want some rice. I want some lice. 21 22 23 24 2001 9 18 3 2000 4 21 3,. 13,. Science/Technology, Design, Experiments,
1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15. 1. 2. 3. 16 17 18 ( ) ( 19 ( ) CG PC 20 ) I want some rice. I want some lice. 21 22 23 24 2001 9 18 3 2000 4 21 3,. 13,. Science/Technology, Design, Experiments,
IPSJ SIG Technical Report Vol.2009-DPS-141 No.20 Vol.2009-GN-73 No.20 Vol.2009-EIP-46 No /11/27 1. MIERUKEN 1 2 MIERUKEN MIERUKEN MIERUKEN: Spe
 1. MIERUKEN 1 2 MIERUKEN MIERUKEN MIERUKEN: Speech Visualization System Based on Augmented Reality Yuichiro Nagano 1 and Takashi Yoshino 2 As the spread of the Augmented Reality(AR) technology and service,
1. MIERUKEN 1 2 MIERUKEN MIERUKEN MIERUKEN: Speech Visualization System Based on Augmented Reality Yuichiro Nagano 1 and Takashi Yoshino 2 As the spread of the Augmented Reality(AR) technology and service,
Microsoft Word - GrCadSymp1999.doc
 u u Ê É Îf ÈÉ uõòñõçí uõòñõëêi oy * ÎÏ Ó ÏÕ( ) **Ï ÓÐ ÕÖ *** ÎÏ Ó ÏÕ( ) APÑÖÕ ÑÕ { itot, inoue, furuhata} @trl.ibm.co.jp [email protected] Automated Conversion of Triangular Mesh to Quadrilateral Mesh with
u u Ê É Îf ÈÉ uõòñõçí uõòñõëêi oy * ÎÏ Ó ÏÕ( ) **Ï ÓÐ ÕÖ *** ÎÏ Ó ÏÕ( ) APÑÖÕ ÑÕ { itot, inoue, furuhata} @trl.ibm.co.jp [email protected] Automated Conversion of Triangular Mesh to Quadrilateral Mesh with
 24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
BendyLights BendyLights BendyLight 3 BendyLight BendyLight BendyLight 2 3 BendyLights [2] [3] [4] 3. BendyLights BendyLights BendyLights 1(a)
![BendyLights BendyLights BendyLight 3 BendyLight BendyLight BendyLight 2 3 BendyLights [2] [3] [4] 3. BendyLights BendyLights BendyLights 1(a)](/thumbs/89/99479385.jpg "BendyLights BendyLights BendyLight 3 BendyLight BendyLight BendyLight 2 3 BendyLights [2] [3] [4] 3. BendyLights BendyLights BendyLights 1(a)") BendyLights 1 1 1 CG, An Intuitive Editing System for a Shadow Using BendyLights Tetsu Kasai 1 Yoshinori Dobashi 1 Tsuyoshi Yamamoto 1 Abstract: Shadows are important visual clues for computer graphics.
BendyLights 1 1 1 CG, An Intuitive Editing System for a Shadow Using BendyLights Tetsu Kasai 1 Yoshinori Dobashi 1 Tsuyoshi Yamamoto 1 Abstract: Shadows are important visual clues for computer graphics.
[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So
![[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So](/thumbs/76/74386745.jpg "[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So") 1,a) 2 2 1 2,b) 3,c) A choreographic authoring system reflecting a user s preference Ryo Kakitsuka 1,a) Kosetsu Tsukuda 2 Satoru Fukayama 2 Naoya Iwamoto 1 Masataka Goto 2,b) Shigeo Morishima 3,c) Abstract:
1,a) 2 2 1 2,b) 3,c) A choreographic authoring system reflecting a user s preference Ryo Kakitsuka 1,a) Kosetsu Tsukuda 2 Satoru Fukayama 2 Naoya Iwamoto 1 Masataka Goto 2,b) Shigeo Morishima 3,c) Abstract:


 26102 (1/2) LSISoC: (1) (*) (*) GPU SIMD MIMD FPGA DES, AES (2/2) (2) FPGA(8bit) (ISS: Instruction Set Simulator) (3) (4) LSI ECU110100ECU1 ECU ECU ECU ECU FPGA ECU main() { int i, j, k for { } 1 GP-GPU
26102 (1/2) LSISoC: (1) (*) (*) GPU SIMD MIMD FPGA DES, AES (2/2) (2) FPGA(8bit) (ISS: Instruction Set Simulator) (3) (4) LSI ECU110100ECU1 ECU ECU ECU ECU FPGA ECU main() { int i, j, k for { } 1 GP-GPU
Emacs ML let start ::= exp (1) exp ::= (2) fn id exp (3) ::= (4) (5) ::= id (6) const (7) (exp) (8) let val id = exp in
 exp ::= (2) fn id exp (3) ::= (4) (5) ::= id (6) const (7) (exp) (8) let val id = exp in") Emacs, {l06050,sasano}@sic.shibaura-it.ac.jp Eclipse Visual Studio Standard ML Haskell Emacs 1 Eclipse Visual Studio variable not found LR(1) let Emacs Emacs Emacs Java Emacs JDEE [3] JDEE Emacs Java 2
Emacs, {l06050,sasano}@sic.shibaura-it.ac.jp Eclipse Visual Studio Standard ML Haskell Emacs 1 Eclipse Visual Studio variable not found LR(1) let Emacs Emacs Emacs Java Emacs JDEE [3] JDEE Emacs Java 2
[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis
![[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis](/thumbs/76/74386791.jpg "[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis") 1,a) 2 2 2 1 2 3 24 Motion Frame Omission for Cartoon-like Effects Abstract: Limited animation is a hand-drawn animation style that holds each drawing for two or three successive frames to make up 24 frames
1,a) 2 2 2 1 2 3 24 Motion Frame Omission for Cartoon-like Effects Abstract: Limited animation is a hand-drawn animation style that holds each drawing for two or three successive frames to make up 24 frames
IPSJ SIG Technical Report Vol.2017-HCI-173 No.5 Vol.2017-EC-44 No /6/1 1,a) 1,2,b) 3,c) 1,d) 3D * 1* Graduate School of Engineerin
 1,2,b) 3,c) 1,d) 3D * 1* Graduate School of Engineerin") 1,a) 1,2,b) 3,c) 1,d) 3D 1. 2.5 * 1*2 2.5 1 Graduate School of Engineering, Kobe University 2 PRESTO, Japan Science and Technology Agency 3 School of Information Science and Engineering, Ritsumeikan University
1,a) 1,2,b) 3,c) 1,d) 3D 1. 2.5 * 1*2 2.5 1 Graduate School of Engineering, Kobe University 2 PRESTO, Japan Science and Technology Agency 3 School of Information Science and Engineering, Ritsumeikan University
- (20 ) 400 () 3DCG No.51 No.61 No.62 No.11 P 2 16
 400 () 3DCG No.51 No.61 No.62 No.11 P 2 16") - (20 ) 226-8503 1974 6 10 29 4259 Tel:045-924-5050 Fax:045-924-5016 E-mail:[email protected] Tel: Fax: E-mail: Tel:03-3786-5650 Tel:090-6036-8520 P 1 16 - (20 ) 400 () 3DCG No.51 No.61 No.62 No.11
- (20 ) 226-8503 1974 6 10 29 4259 Tel:045-924-5050 Fax:045-924-5016 E-mail:[email protected] Tel: Fax: E-mail: Tel:03-3786-5650 Tel:090-6036-8520 P 1 16 - (20 ) 400 () 3DCG No.51 No.61 No.62 No.11
量子情報科学−情報科学の物理限界への挑戦- 2018
 1 http://qi.mp.es.osaka-u.ac.jp/main 2 0 5000 10000 15000 20000 25000 30000 35000 40000 1945 1947 1949 1951 1953 1955 1957 1959 1961 1963 1965 1967 1969 1971 1973 1975 1977 1979 1981 1983 1985 1987 1989
1 http://qi.mp.es.osaka-u.ac.jp/main 2 0 5000 10000 15000 20000 25000 30000 35000 40000 1945 1947 1949 1951 1953 1955 1957 1959 1961 1963 1965 1967 1969 1971 1973 1975 1977 1979 1981 1983 1985 1987 1989