Self-Organizing Map:SOM SOM..
|
|
|
- えの やまのかみしゃ
- 9 years ago
- Views:
Transcription
1 2016 3

2 Self-Organizing Map:SOM SOM SOM SOM SOM (S-SOM) S-SOM S-SOM S-SOM U-matrix (HMM) HMM Forward algorithm Backward algorithm Viterbi algorithm Baum-Welch algorithm HMM (HMM-S-SOM) 51 1
 51 1")
3 4.1 HMM-S-SOM HMM-S-SOM (F-HMM-S-SOM) F-HMM-S-SOM F-HMM-S-SOM F-HMM-S-SOM DNA

4 1 1.1,,,,,,,,,,,,,k-means,,,, 3

5 1.2,,,,,,,,,,,, Siri,,,,,,, [1][2],,, [3],,,,,,,,,,, 4

6 ,,,,,,, [4], [5], 5

7 1.3,,,,,, [6][7],,,,,,,, 3,, 3 6

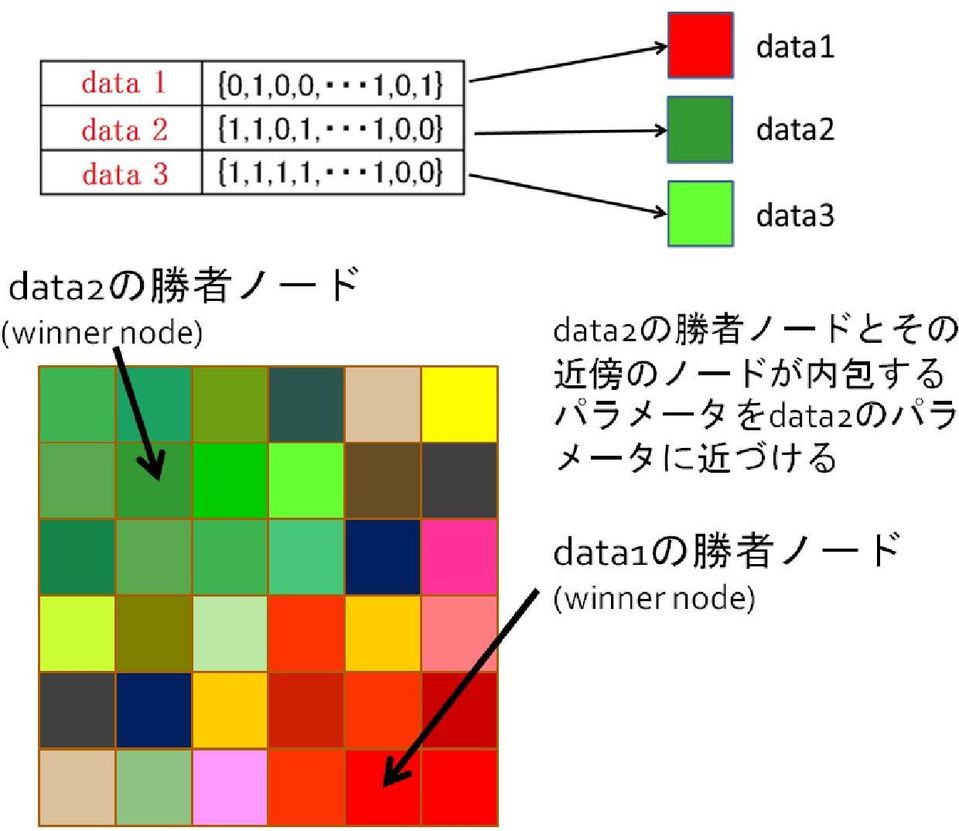
8 2 Self-Organizing Map:SOM 2.1 SOM, (TKohonen) SOM,,,, 1, data 2, data3, (data1, data2),,,, 1: SOM 7

, 8")
9 2.2 SOM, ( 2) SOM,,,data2 data3,data2,data3,data1 2 2: SOM SOM,data1, 2,SOM data1data3, ,, SOM,,1 1,,,, ( 3), 8


10 ,, 3: SOM,data1,data1 3, (winner node) data1, 4,,,, data1 data1 data1,data2, 9


11 4: data1 data2, data1 5, data2 data2, data2 data3 data2 6,,,data3 data2,data2 data1,,,,,, 10


12 5: data2 6: data3 11
13 , SOM,,, SOM SOM STEP 1: ()v j SOM STEP 2: v j w N j k N j k N j k = min f j (k) (1) k f j (k) = n (a jt w kt ) 2 (2) STEP 3: N j k w k v j t=1 h(p jx, P jx ) = exp( P jx P jx 2 σ 2 ) (3) w k = β h(p jx, P jx )f j (k) (4) w new k = w k + w k (5) 12
 = exp( P jx P jx 2 σ 2 ) (3) w k = β h(p")

14 P jx N j k P jx P jx P jx σ β 7 7: 24 w 2.3 SOM Data1Data R,G,B SOM Data2 Data5,, 13

15 , SOM SOMPlane-SOM,,,, SOM ( 9:), SOM,, SOM ( 9:), 14

 SOM SOM [8][9][10][11] [9] OpenGL")
16 8: SOM 2.4 (S-SOM) SOM SOM [8][9][10][11] [9] OpenGL Windows Windows API DirectX [12][13] 15
![[8][9][10][11] [9]](/docs-images/51/20162934/images/page_16.jpg "OpenGL Windows Windows")

17 9: SOM S-SOM DirectX D 10, 16


18 10: 11 11: S-SOM SOM 17
 S- SOM l N k (k = 1, 2, 3,..., l) w k = {w k1, w k2, w k3,.")
19 SOM SOM S-SOM SOM SOM 12 12: S-SOM S-SOM n m v j = {a j1, a j2, a j3,..., a jn }(j = 1, 2, 3,..., m) S- SOM l N k (k = 1, 2, 3,..., l) w k = {w k1, w k2, w k3,..., w kn } 18
 S- SOM l N k (k = 1, 2, 3,.")
20 S-SOM STEP 1: w w STEP 2: v v j SOM STEP 3: v j w N j k N j k N j k = min k f j (k) (6) f j (k) = n (a jt w kt ) 2 (7) t=1 STEP 4: N j k w k v j h(p jx, P jx ) = exp( P jx P jx θ 2 ) (8) w k = β h(p jx, P jx )f j (k) (9) w new k = w k + w k (10) P jx N j k P jx P jx P jx θ β 19
f j (k) (9) w new k = w k + w k (10) P jx N j k P jx P jx P jx θ β")
21 θ 13β 13: S-SOM 20

22 2.4.3 S-SOM U-matrix SOM S-SOM : S-SOM U-matrix 21
23 S-SOM U-matrix S-SOM n n-1 S-SOM n U-matrix T g U g ab U g ab N a N b U g ab = U g ba U g ab, U g ba U g N k (k = 1, 2, 3,..., l) w k = {w k1, w k2, w k3,..., w kn } SOM U g ab n U g ab = (w aj w bj ) 2 (11) j=1 T g N a V a, V g L V g = L (αu g + max h(u h ) M min h (U h ) ) (12) max h (U h ) min h (U h ) V a = L 1 6 j (αu g aj + max h(u h ) M min h (U h ) max h (U h ) min h (U h ) ) (13) α = M 1 max h (U h ) min h (U h ) (14) V g min(u h ) 0, max (U h ) M U g L h h 22

24 M L V a N a 6 U a L 15: S-SOM U-matrix 16: S-SOM U-matrix 23
25 3 3.1 (HMM) Baum-Welch algorithm Viterbi algorithm 3.2 HMM HMM Q = {q 1, q 2, q 3,..., q k } : q a i,j : q i q j j a i,j = 1 s i (x) : i x x s i (x) = 1 w[t] : t 24
26 Θ : HMM Forward algorithm Forward algorithm HMM w w N R N R R M R R m (W ) = {r m [0], r m [1], r m [2],..., r m [N]} (m = 1, 2, 3,..., M) (15) r m [t] R m (W ) t S L w M N L w = s g(m,t 1) (w[t]) a g(m,t 1),j g(m, t) = r m [t] (16) m=1 t=1 17 A, B, C HMM w AABC w 1 25
27 17: 26
28 1: w R 1 R 3 w R 1 : a 0,0 s 0 (w[1]) a 0,1 s 0 (w[2]) a 1,2 s 1 (w[3]) a 2,3 s 2 (w[4]) = a 0,0 s 0 (A) a 0,1 s 0 (A) a 1,2 s 1 (B) a 2,3 s 2 (C) = = (17) R 2 : a 0,1 s 0 (w[1]) a 1,1 s 1 (w[2]) a 1,2 s 1 (w[3]) a 2,3 s 2 (w[4]) = a 0,1 s 0 (A) a 1,1 s 1 (A) a 1,2 s 1 (B) a 2,3 s 2 (C) = = (18) R 3 : 27
29 a 0,1 s 0 (w[1]) a 1,2 s 1 (w[2]) a 2,2 s 2 (w[3]) a 2,3 s 2 (w[4]) = a 0,1 s 0 (A) a 1,2 s 1 (A) a 2,2 s 2 (B) a 2,3 s 2 (C) = = (19) w L w L w = = (20) Forward algorithm f j (t) = s i (w[t]) q i Q f i (t 1)a i,j t 1 (21) f 0 (0) = 1 f j (t) t q j w = {w[1], w[2],..., w[t]} 28
30 Forward algorithm, L w f 0 (0) = 1.0 f 0 (1) = f 0 (0) a 0,0 s 0 (w[1]) = f 0 (0) a 0,0 s 0 (A) = = 0.06 f 1 (1) = f 0 (0) a 0,1 s 0 (w[1]) = f 0 (0) a 0,1 s 0 (A) = = 0.24 f 1 (2) = f 0 (1) a 0,1 s 0 (w[2]) + f 1 (1) a 1,1 s 1 (w[2]) = f 0 (1) a 0,1 s 0 (A) + f 1 (1) a 1,1 s 1 (A) = = f 2 (2) = f 1 (1) a 1,2 s 1 (w[2]) = f 1 (1) a 1,2 s 1 (A) = = f 2 (3) = f 1 (2) a 1,2 s 1 (w[3]) + f 2 (2) a 2,2 s 2 (w[3]) = f 1 (2) a 1,2 s 1 (B) + f 2 (2) a 2,2 s 2 (B) = = f 3 (4) = f 2 (3) a 2,3 s 2 (w[4]) = f 2 (3) a 2,3 s 2 (C) = = L w = f 3 (4) =
31 3.2.2 Backward algorithm Forward algorithm w q j Backward algorithm q j w = {w[n], w[n 1],..., w[t + 1]} b j (t) b i (t) = q j Q b j (t + 1)a i,j s i (w[t + 1]) (22) 17 AABC L w Backward algorithm 30
32 b 3 (4) = 1.0 b 2 (3) = b 3 (4) a 2,3 s 2 (w[4]) = b 3 (4) a 2,3 s 2 (C) = = 0.06 b 2 (2) = b 2 (3) a 2,2 s 2 (w[3]) = b 2 (3) a 2,2 s 2 (B) = = b 1 (2) = b 2 (3) a 1,2 s 1 (w[3]) = b 2 (3) a 1,2 s 1 (B) = = b 1 (1) = b 2 (2) a 1,2 s 1 (w[2]) + b 1 (2) a 1,1 s 1 (w[2]) = b 2 (2) a 1,2 s 1 (A) + b 1 (2) a 1,1 s 1 (A) = = b 0 (1) = b 1 (2) a 0,1 s 0 (w[2]) = b 1 (2) a 0,1 s 0 (A) = = b 0 (0) = b 1 (1) a 0,1 s 0 (w[1]) + b 0 (1) a 0,0 s 0 (w[1]) = b 1 (1) a 0,1 s 0 (A) + b 0 (1) a 0,0 s 0 (A) = = L w = b 0 (0) = Backward algorithm b 0 (0) Forward algorithm f 3 (4) b 0 (0) = f 3 (4) 31
33 3.2.3 Viterbi algorithm Forward algorithm f j (t) = s i (w[t]) f i (t 1)a i,j q i Q w Viterbi algorithm W Rm(w) N L w = arg max s g(m,t) (w[t]) a g(m,t),j g(m, t) = r m [t] (23) t=0 f j (t) = s i (w[t]) max q Q f i(t 1)a i,j (24) 32
34 3.2.4 Baum-Welch algorithm HMM Viterbi algorithm HMM Θ Θ w Viterbi algorithm w Θ Baum-Welch algorithm Θ HMM w Θ Θ Forward algorithm L w 18 left-to-light 33
35 18: Baum-Welch algorithm Baum-Welch algorithm O i,j : W = {w 1, w 2,..., w l } q i q j E i (x) : W = {w 1, w 2,..., w l } x q i P (w k Θ) : W = {w 1, w 2,..., w l } Θ w k L w P (w k Θ) = L w W P (W Θ) P (W Θ) = l k=1 L k l 34
36 , O i,j E i (x) t 1 O i,j = l k=1 1 fi k (t 1) a i,j s i (w k [t]) b k j (t) (25) P (w k Θ) t E i (x) = l k=1 1 P (w k Θ) t:w k [t]=x f k i (t 1) b k i (t 1) (26) O i,j E i (x) a i,j s i (x) a i,j = s i (x) = O i,j j O i,j E i(x) x E i (x ) (27) (28) 35
37 17 AABC AABC L w O i,j = = = t 1 1 f i (t 1) a i,j s i (w 1 [t]) b j (t) P (w k Θ) k=1 t 1 f i (t 1) a i,j s i (w 1 [t]) b j (t) P (w 1 Θ) t f i (t 1) a i,j s i (w 1 [t]) b j (t) L w t q i q j ξ t (i, j) ξ t (i, j) = f i(t 1) a i,j s i (w k [t]) b j (t) L w O i,j = t ξ t (i, j) PROCESS1PROCESS4 36
38 PROCESS 1 ξ t (i, j) ξ t (i, j) ξ 1 (0, 0) = f 0(0) a 0,0 s 0 (w 1 [1]) b 0 (1) = f 0(0) a 0,0 s 0 (A) b 0 (1) L w L w = = ξ 1 (0, 1) = f 0(0) a 0,1 s 0 (w 1 [1]) b 1 (1) = f 0(0) a 0,1 s 0 (A) b 1 (1) L w L w = = ξ 2 (0, 1) = f 0(1) a 0,1 s 0 (w 1 [2]) b 1 (2) = f 0(1) a 0,1 s 0 (A) b 1 (2) L w L w = = ξ 2 (1, 1) = f 1(1) a 1,1 s 1 (w 1 [2]) b 1 (2) = f 1(1) a 1,1 s 1 (A) b 1 (2) L w L w = = ξ 2 (1, 2) = f 1(1) a 1,2 s 1 (w 1 [2]) b 2 (2) = f 1(1) a 1,2 s 1 (A) b 2 (2) L w L w = = ξ 3 (1, 2) = f 1(2) a 1,2 s 1 (w 1 [3]) b 2 (3) = f 1(2) a 1,2 s 1 (B) b 2 (3) L w L w = = ξ 3 (2, 2) = f 2(2) a 2,2 s 2 (w 1 [3]) b 2 (3) = f 2(2) a 2,2 s 2 (B) b 2 (3) L w L w = = ξ 4 (2, 3) = f 2(3) a 2,3 s 2 (w 1 [4]) b 3 (4) = f 2(3) a 2,3 s 2 (C) b 3 (4) L w L w = =
39 ξ 1 (0, 0) + ξ 1 (0, 1) = 1.0 ξ 2 (0, 1) + ξ 2 (1, 1) + ξ 2 (1, 2) = 1.0 ξ 3 (1, 2) + ξ 3 (2, 2) = 1.0 ξ 4 (2, 3) = 1.0 PROCESS 2 a i,j PROCESS 1 ξ t (i, j) a i,j = O i,j j O i,j O i,j O i,j = ξ t (i, j) t j 29 O i,j = t ξ t (i, j) a i,j j a i,j = t ξ t(i, j) j ξ t(i, j) t (29) a i,j 38
40 a 0,0 = = a 0,1 = = a 1,1 = = a 1,2 = = a 2,2 = = a 2,3 = = ξ 1 (0, 0) ξ 1 (0, 0) + ξ 1 (0, 1) + ξ 2 (0, 1) ξ 1 (0, 1) + ξ 2 (0, 1) ξ 1 (0, 0) + ξ 1 (0, 1) + ξ 2 (0, 1) ξ 2 (1, 1) ξ 2 (1, 1) + ξ 2 (1, 2) + ξ 3 (1, 2) ξ 2 (1, 2) + ξ 3 (1, 2) ξ 2 (1, 1) + ξ 2 (1, 2) + ξ 3 (1, 2) ξ 3 (2, 2) ξ 3 (2, 2) + ξ 4 (2, 3) ξ 4 (2, 3) ξ 3 (2, 2) + ξ 4 (2, 3) a i,j a i,j 39
41 PROCESS 3 s i (x) s i (x) l 1 L w P (w k Θ) k=1 l 1 1 P (w k Θ) = 1 P (w 1 Θ) = 1 L w k=1 k=1 26 E i (x) = 1 L w t:w k [t]=x f i (t 1) b i (t 1) (30) 3022 E i (x) = 1 L w = 1 = = t:w k [t]=x L w t:w k [t]=x f i (t 1) b i (t 1) f i (t 1) b j (t)a i,j s i (w[t]) q j Q t:w k [t]=x f i(t 1) q j Q b j(t)a i,j s i (w[t]) t:w k [t]=x q j Q L w f i (t 1) b j (t)a i,j s i (w[t]) L w (31) ξ t (i, j) = f i(t 1) a i,j s i (w k [t]) b j (t) L w 31 E i (x) = t:w k [t]=x q j Q f i (t 1) b j (t)a i,j s i (w[t]) L w = t:w k [t]=x q j Q ξ t (i, j) (32) 40
42 28 s i (x) = = = E i (x) x E i (x ) t:w k [t]=x x t:w k [t]=x t t:w k [t]=x q j Q ξ t(i, j) q j Q ξ t(i, j) q j Q ξ t(i, j) q j Q ξ t(i, j) (33) 41
43 33 s i (x) s 0 (A) = ξ 1(0, 0) + ξ 1 (0, 1) + ξ 2 (0, 1) ξ 1 (0, 0) + ξ 1 (0, 1) + ξ 2 (0, 1) = 1.0 s 0 (B) = 0 ξ 1 (0, 0) + ξ 1 (0, 1) + ξ 2 (0, 1) = 0.0 s 0 (C) = 0 ξ 1 (0, 0) + ξ 1 (0, 1) + ξ 2 (0, 1) = 0.0 s 1 (A) = = s 1 (B) = = s 1 (C) = s 2 (A) = s 2 (B) = = s 2 (C) = = ξ 2 (1, 1) + ξ 2 (1, 2) ξ 2 (1, 1) + ξ 2 (1, 2) + ξ 3 (1, 2) ξ 3 (1, 2) ξ 2 (1, 1) + ξ 2 (1, 2) + ξ 3 (1, 2) ξ 2 (1, 1) + ξ 2 (1, 2) + ξ 3 (1, 2) = ξ 3 (2, 2) + ξ 4 (2, 3) = 0.0 ξ 3 (2, 2) ξ 3 (2, 2) + ξ 4 (2, 3) ξ 4 (2, 3) ξ 3 (2, 2) + ξ 4 (2, 3)
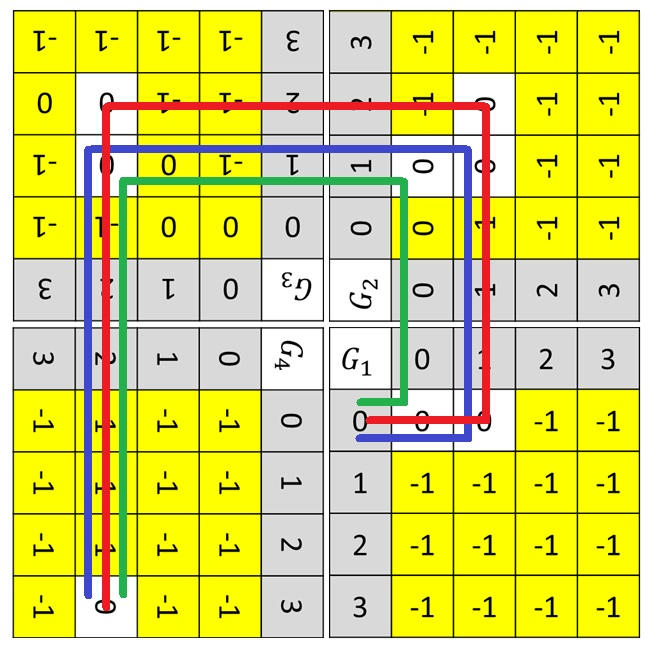
44 3.3 HMM Forward algorithmbackward algorithmbaum-welch algorithm 17 AABC 1 t G = {G 1, G 2,...G t,...g l } k G t t k k G t = Γ t (0, 0) Γ t (0, 1) Γ t (0, k 1) Γ t (1, 0) Γ t (1, 1) Γ t (1, k 1) Γ t (k 1, 0) Γ t (k 1, 1) Γ t (k 1, k 1) 4 k = 4 G t Γ t (i, j) t i s i (w[t]) i j 0 i s i (w[t]) i j t = 1 A i A Γ 1 (i, j) = 1, i 43
45 A i j Γ 1 (i, j) = 1 i j t = 1 t = 4 44
46 t = 1 t = 1 0 i = 0 G 1 i 0 1 t = 4 t = 4 4 i 3(... k 1 = 4 1 = 3) a i,3 0 i 1, 0 i = 0 1 Γ 1 (0, 0) = 0 (... s 0 (A) a 0,0 0) Γ 1 (0, 1) = 0 (... s 0 (A) a 0,1 0) Γ 1 (0, 2) = 1 (... s 0 (A) a 0,1 = 0) Γ 1 (0, 3) = 1 (... s 0 (A) a 0,1 = 0) 45
47 Γ 1 (1, 0) = 1 Γ 1 (2, 0) = 1 Γ 1 (3, 0) = 1 Γ 1 (1, 1) = 1 Γ 1 (2, 1) = 1 Γ 1 (3, 1) = 1 Γ 1 (1, 2) = 1 Γ 1 (2, 2) = 1 Γ 1 (3, 2) = 1 Γ 1 (1, 3) = 1 Γ 1 (2, 3) = 1 Γ 1 (3, 3) = 1 t G t 19 46

48 19: G t G t STEP 1 G 1 j 1 2 G 2 j 1 20 G 1 G 2 G 3, G 4 t = 1 G t j 1 G t+1 j 1 t = l 1 G 47

49 20: G STEP t = l G t i 1 G t 1 i 1 t = 2 G 21 48
 0 1 0 1 AABC 22 1")
50 21: G STEP STEP t i j G t Γ t (i, j) AABC
51 22: G 50

52 4 隠れマルコフ球面自己組織化マップ (HMM-S-SOM) 隠れマルコフ球面自己組織化マップとは,S-SOM のノードに隠れマルコフモデル を用いたものであり 図 23, 入力データには, ベクトルではなく文字列集合を用い る. ノード上に内包された隠れマルコフモデルは, すべて同じ構造を持つ この自 己組織化マップは, データを直接分類するのではなくデータの背景にある確率モデ ルにもとづいて, 確率モデルを球面上にクラスタリングし, その分類結果を視覚的に も容易に提示することのできる学習モデルである S-SOM と HMM-S-SOM の違い については表 2 に示す ノードや入力データの形式の違い以外に, 勝者ノードの決 定方法や, ノードの更新の方法が異なる その詳細については, 次の HMM-S-SOM の学習アルゴリズムの説明に記す 図 23: 隠れマルコフ球面自己組織化マップ 51

53 2: S-SOM HMM-S-SOM 4.1 HMM-S-SOM STEP 0: HMM Θ k STEP 1: STEP 2: Baum-Welch algorithm STEP 3,, STEP 3: HMM Baum-Welch algorithm, HMM SOM 52
54 SOM, STEP1STEP3, STEP2,,,, 24,,,Baum-Welch algorithm HMM,,,,Baum-Welch algorithm HMM,STEP3 24: 53
55 4.2, left to right, Ergodic, U-matrix, U-matrix U-matrix,,,, A,B,C 3 HMM HMM M 1, M 3,..., M 10,,,, ,

56 3: M 1 4: M 2 5: M 3 6: M 4 7: M 5 8: M 6 55
57 9: M 7 10: M 8 11: M 9 12: M 10 13: M 1 14: M 2 56

58 15: M 3 16: M 4 17: M 5 18: M 6 19: M 7 20: M 8 57
59 21: M 9 22: M 10 25: HMM-S-SOM HMM-S-SOM M 1 Data1 M 1 M 10 M 1 M 10 M 3, M 8, M 9, M 7, M 2, M 5, M 6, M 4 M 1,U-matrix HMM, U-matrix HMM 58

60 26:, HMM,, 27,,,,model 1 model 4,HMM -matrix,, 59
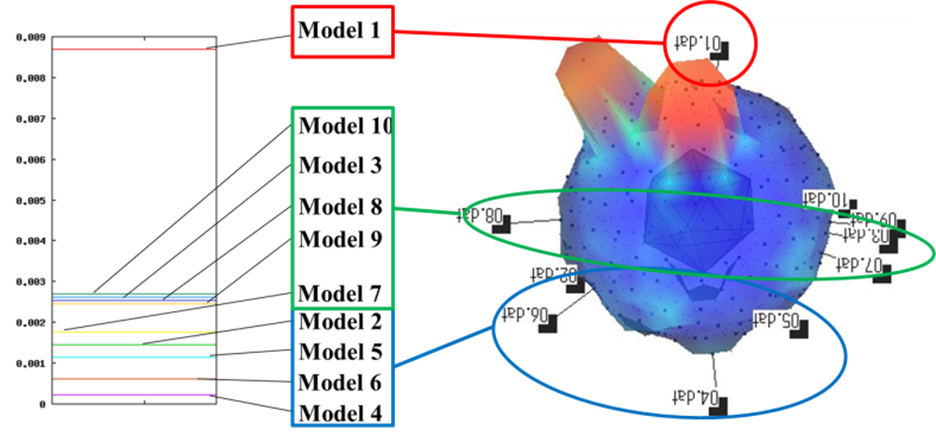
61 27: 60
 ( 28) 28: F-HMM-S-SOM,,")
62 5 (F-HMM-S-SOM), Baum-Welch algorithm,,som,hmm,, SOM HMM, (F-HMM-S-SOM) ( 28) 28: F-HMM-S-SOM,, HMM,, 61
63 , F-S-HMM-SOM, A,B,C, n, n + 1,A,B,C,,, A,B,C, l, l 1 l, 12 (l 1) m, l max, (m 2 + m)(l max 1) ACCB, BCC,,, 2,ACCB, AC, 29 AC, 0, , CC , CB ACCB 62
 Θ k :")
64 ,BCC :,,, 30,, 0( 30: ) Θ k : HMMS-SOMHMMΘ k = {A k, S k } 63
65 30: A k = a k 01 a k 02 a k 0j a k 11 a k 12 a k 1j S k = s k 01 s k 02 s k 0h s k 11 a k 12 s k 1h a k i1 a k i2 a k ij s k i1 s k i2 s k ih a i,j i j s i,h i x h X : X = {x 1, x 2, x 3,..., x h } V = {v 1, v 2, v 3,..., v h } STEP 1: HMM Θ k STEP 2: W n Baum-Welch algorithm N i HMM L i, N i E i STEP 3:, 64
66 (1 E i E max ) L i,e max E i STEP 4: Baum-Welch algorithm, STEP 5:,SOM N n k Θ k STEP 4 Nk n HMM Θ n k = {An k, Sn k } A = β h(p nx, P nx )(A n k A k) A new k = A k + A S = β h(p nx, P nx )(Sk n S k) S new k = S k + S Θ new k Θ k Θ new k = {A new k, Sk new } h(p nx, P nx ) = exp( P nx P nx θ 2 ) P jx N j k P jx 65
67 P jx P jx β,baum-welch algorithm STEP 6: SOM SOM STEP2STEP5,,, U-matrix, 66
,, 67")
68 5.1 F-HMM-S-SOM,, HMM-S-SOM, F-HMM-S-SOM HMM U-matrix 31,, 31: HMM U-matrix, ( 32),, 67
![32: U-matrix 5.2 F-HMM-S-SOM,,,DNA (HMM-S-SOM) 5.2.1 DNA, DNA ATGC,ATGC [14], 1024, 6](/docs-images/39/20162934/images/69-0.png "1024, (Hsall), Mmuall, (Cfaall), Ecoall, (Dmaall), (Osaall),HMM- S-SOM, U-matrix 33")
69 32: U-matrix 5.2 F-HMM-S-SOM,,,DNA (HMM-S-SOM) DNA, DNA ATGC,ATGC [14], 1024, , (Hsall), Mmuall, (Cfaall), Ecoall, (Dmaall), (Osaall),HMM- S-SOM, U-matrix 33 68
,")
70 33: HMM-S-SOM,,.. F-HMM-S-SOM,HMM U-matrix, ( 34), ( 35),,,,,,,,,, 69

71 34: F-HMM-S-SOM : U-matrix 35: F-HMM-S-SOM : U-matrix 70
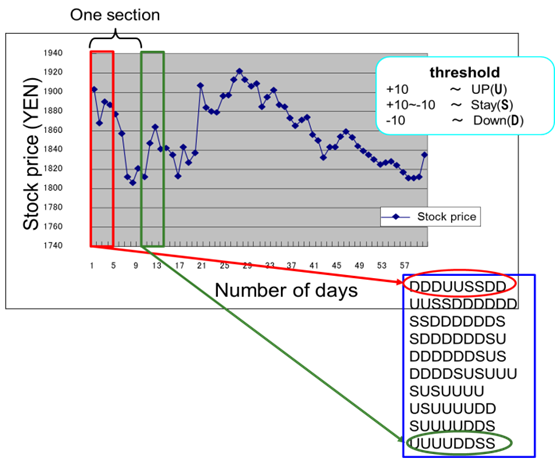
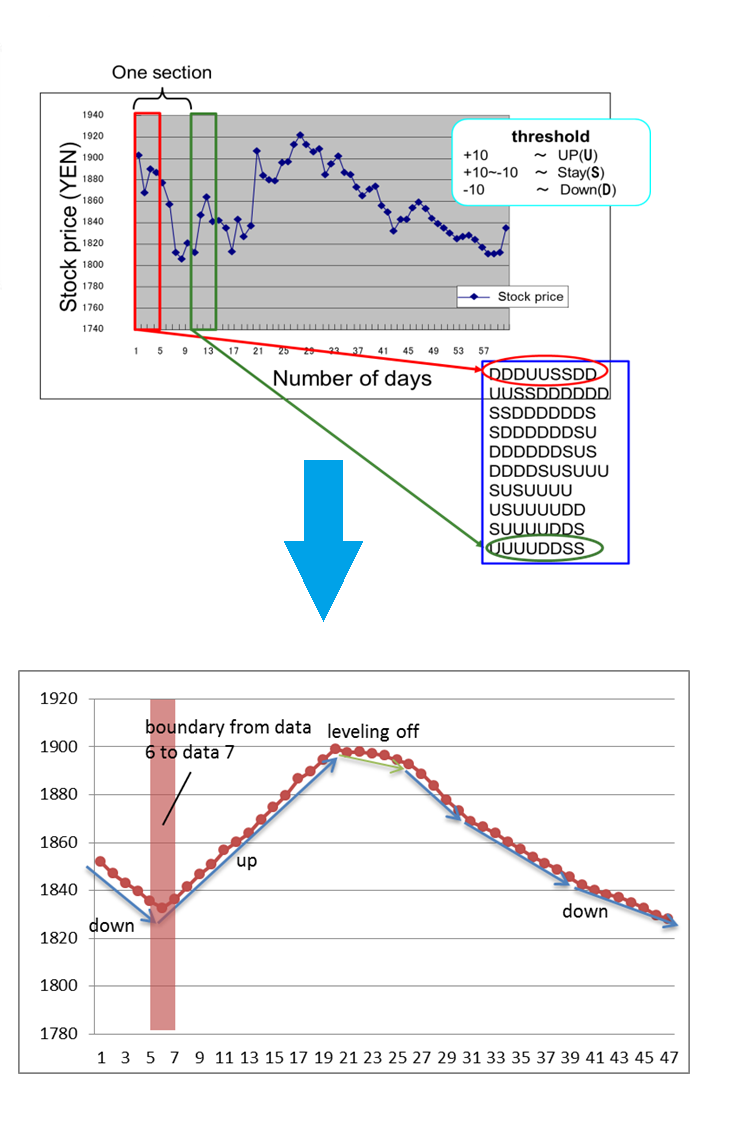
72 5.2.2, ,,,,,,, 36,,,, U, D, S, U D,, F-HMM-S-SOM,F- HMM-S-SOM HMM, 37 4, U,S,D 3,Umatrix, 71
73 36: 72

74 37:,,. t t+1, HMM-S-SOM F-HMM-S-SOM , , S-HMM-SOM, F-S-HMM-SOM,, S-HMM-SOM,U-matrix,,F-S-HMM-SOM, 73
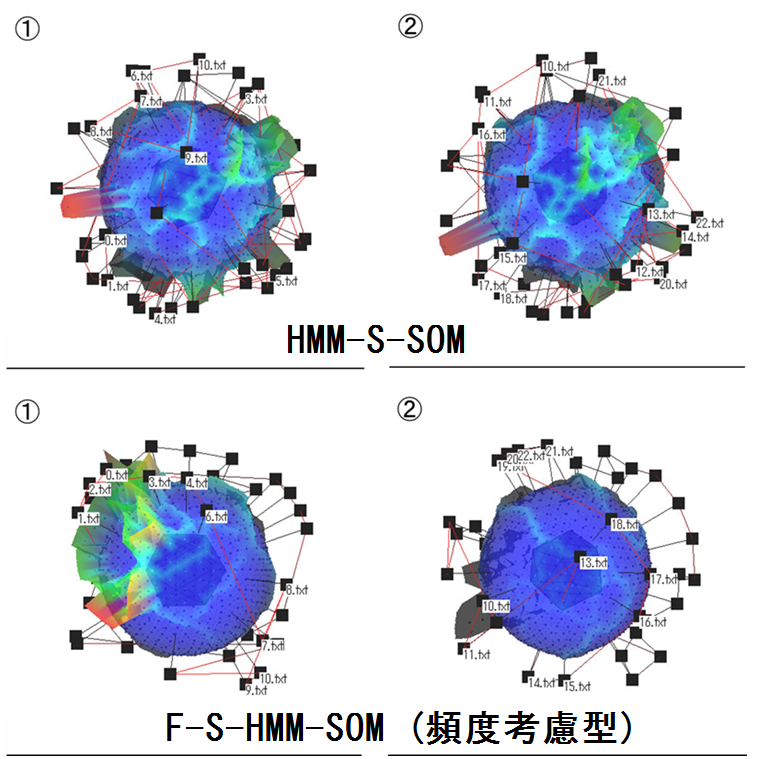
75 38: 74
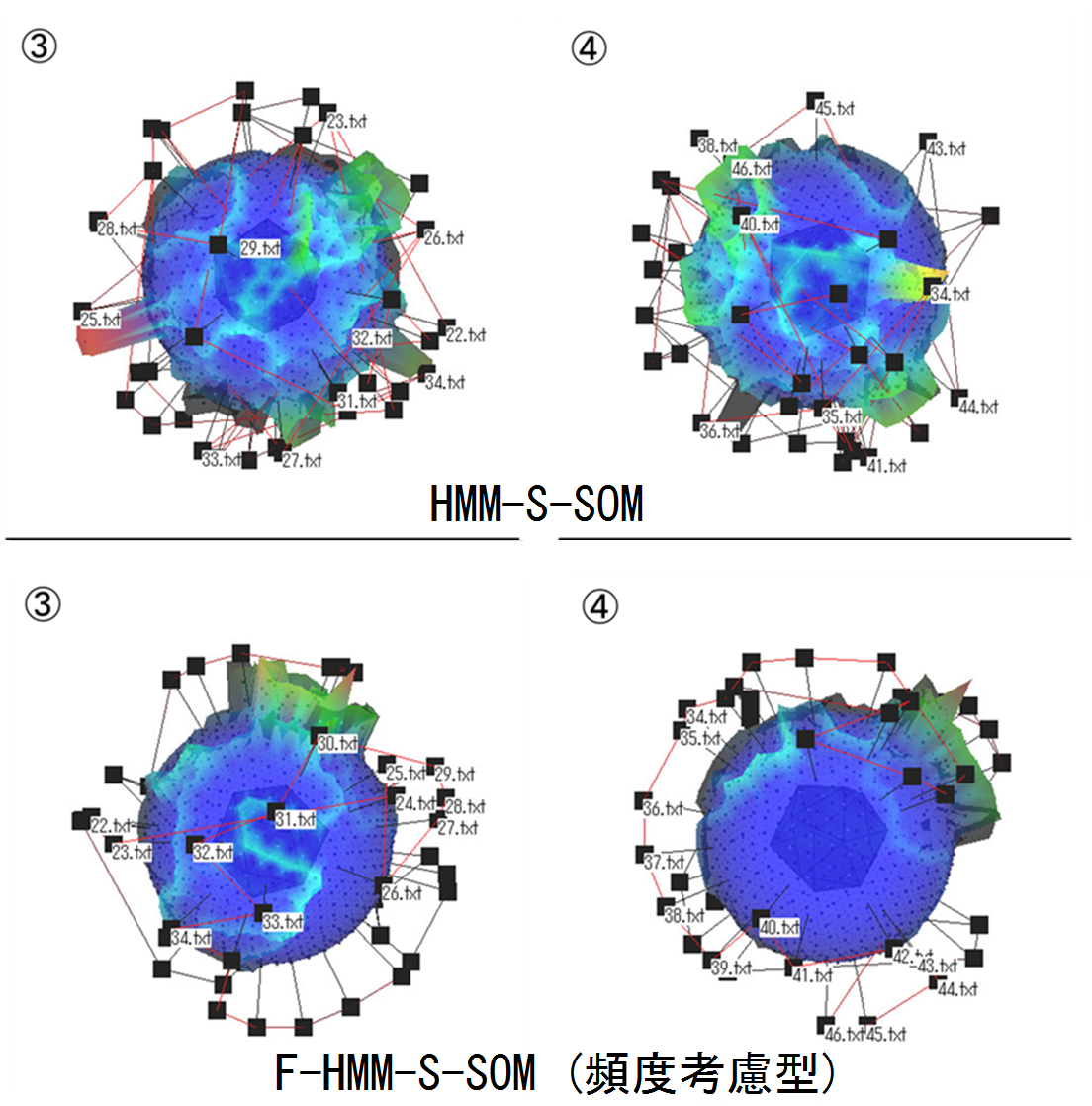
76 39: 75
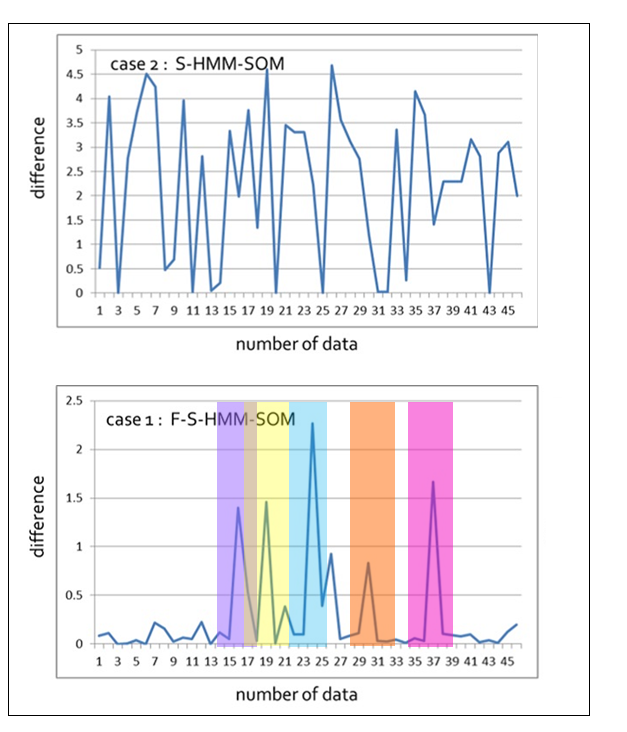
77 , U-matrix,,,, F-S-HMM-SOM 1.377,S-HMM-SOM 2.623,,., 40,, S-HMM-SOM 40,,,, F-S-HMM-SOM 40,,,,,,,,,,,,,,,,, 76
78 40: 77
79 ,, 41,,,, , ,,,,, 4,,,,,, 78
80 41: 79

81 図 42: 移動平均線との比較 80

82 図 43: 移動平均線との比較 81

83 : 82
84 6,,,,,,,,,,,,, 44, 1,2, SOM v j x i 1, (mask-vector)w i w i,, ,1,0 83

85 44:, 1, 0 1,1 2, 30 5,,,, 45: SOM,, 45, h a, 84
} L 2 (34) j L = j w2 ij w i w i STEP 3: wi,, µ")
86 STEP 1: 1 x i = {x i0, x i1,..., x in }, h a = {h a0, h a1,..., h an } 2 w i = {w i0, w i1,..., w in } 1 STEP 2: i,l 1 [argmin] i {w ij (h aj v aj w ij x ij )} L 2 (34) j L = j w2 ij w i w i STEP 3: wi,, µ a µ a µ ai ω 46 46: 85
87 (35) m [argmin] m { 1 m m k=2 ( ω k ω m ) 2 } ϕ (35),ϕ 0.5 µ t ω k f(t) = k, f(t) m w new it = w old it + γ(1 w old it ) (36) m < f(t) w new it = w old it + γ(0 w old it ) (37),γ 0 < γ < 1, wi w i 1 0 h a STEP 4:, x new j = x old j + α(v a x old j ) (38) w new j = w old j + β(w i w old j ) (39) α,,0 < α < 1, β 0 < β < 1 86
88 STEP2STEP4,,, h a, 6.1, h a, 1 3,,, noise Mersenne Twister[15] 01 1x,y,z y = 3 x + noise z = noise 2x 0.5, x,y,z x,y,z 87
89 47: y = 3 x + noise z = noise (x 0.5) y = 2 x + noise z = noise (x > 0.5) 3x 0.5,x,z, x 0.5,y z y = 3 x + 2 noise z = noise (x 0.5) 88
90 48: 2 y = 2 z + noise + 2 x = noise (x > 0.5) ,, x y model z, x y 0.819, SOM 51 SOM, 8, 89
91 49: 3 50: 90
92 51: SOM, x y, , x y, x y z, , SOM 53,, x y z, x y 2,model 91
93 52: 53: SOM 92
94 , xy x y, y,x,y,y z x ,, 78, 54: yz,xy, 56 93
95 55: 56: 94
96 56, 54 yz,yz, yz,xy,x, yz,x,, xy,,, SOM, 57 57: SOM,, x z SOM, 95
97 7,,,,,,,, DNA,,,,,,,,,,,,,,,,,,,,.,,,, 96
98 , k-means,., 2,,,.,, SOM F-HMM-S-SOM,, 97
99 ,,,,,,,,,.,,, 98
100 [1],,2012. [2],,,, DEIM Forum 2010 F4-2,2010. [3]Teuvo Kohonen,, :,. [4]Chie Morita and Hiroshi Tsukimoto:Knowledge discovery from numerical data, Knowledge-based Systems,Vol.10,No7,pp ,1998. [5] :,2009. [6] /,, HMM-SOM. [7], HMM-SOM MIDI. [8],,,, : A spherical SOM and its examples/thecnical Report of IEICE. [9],,, : S-SOM, ,
101 [10],,,, : SOM,, Vol.2010-MPS-77 No.29,2010. [11] Ying Xin WU SOM Vol.19, No.6, pp ,2007. [12]N2Factory DirectX. [13]Jeffrey Richter, Christophe Nasarre:Advanced Windows 5, BP,2008. [14]Hiroshi Dozono. et.al:a Design Method of DNA Chips for sequence Analysis Using Self Organizing Maps, Proceeding of WSOM 2003,pp ,2003. [15]M. Matsumoto and T. Nishimura:A 623-dimensionally equidistributed uniform pseudorandom number generator, ACM Trans. on Modeling and Computer Simulation Vol. 8, No. 1, January pp.3-30,
102 1. Gen Niina, Kazuhiro Muramatsu, Hiroshi Dozono: Basic Study on the Classification of Time Series Data Using a Frequency Integrated Spherical Hidden Markov Self Organizing Map, Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol.19 No.2, pp , Gen Niina, Kazuhiro Muramatsu, Hiroshi Dozono: Causal analysis of data using 2-layerd Spherical Self-Organizing Map, The 2015 International Conference on Computational Science and Computational Intelligence (CSCI 15), Las Vegas, USA, pp , Gen Niina, Kazuhiro Muramatsu, Hiroshi Dozono, Tatsuya Chuuto: The data analysis of stock market using a Frequency Integrated Spherical Hidden Markov Self Organizing Map, ICSIIT 2015, 4th International Conference on Soft Computing, Intelligent System and Information Technology, March 11-14, 2015 / Bari, Indonesia, pp , Gen Niina, Kazuhiro Muramatsu, Hiroshi Dozono: The Frequency Integrated Spherical Hidden Markov Self Organizing Map for Learning Time Series Data, ISIS2013, The International Symposium on Advanced Intelligent Systems, Daejeon, Korea, pp ,
103 4. Hiroshi Dozono, Gen Niina and Kazuhiro Muramatsu,: Mapping of DNA sequences using Hidden Markov Model Self-Organizing Maps, Proceedings of The 10th annual IEEE Symposium on Computational Intelligence in Bioinformatics and Computational Biology, IEEE Press, Singapore, Hiroshi Dozono, Gen Niina and Yutaro Kaneko: Mapping the Groups of DNA Sequences using Hidden Markov Model Self Organizing Maps, The First BMIRC International Symposium on Frontiers in Computational Systems Biology and Bioengineering, Fukuoka, Japan, Gen Niina, Hiroshi Dozono: The Spherical Hidden Markov Self Organizing Map for Learning Time Series Data, 22nd International Conference on Artificial Neural Networks, Lausanne, Switzerland, pp , Part I, ,, :, 15,, , : DirectX SOM 19, ,, : 64,
untitled
 K-Means 1 5 2 K-Means 7 2.1 K-Means.............................. 7 2.2 K-Means.......................... 8 2.3................... 9 3 K-Means 11 3.1.................................. 11 3.2..................................
K-Means 1 5 2 K-Means 7 2.1 K-Means.............................. 7 2.2 K-Means.......................... 8 2.3................... 9 3 K-Means 11 3.1.................................. 11 3.2..................................
SOM SOM(Self-Organizing Maps) SOM SOM SOM SOM SOM SOM i
 SOM SOM SOM SOM SOM SOM i") 20 SOM Development of Syllabus Vsualization System using Spherical Self-Organizing Maps 1090366 2009 3 5 SOM SOM(Self-Organizing Maps) SOM SOM SOM SOM SOM SOM i Abstract Development of Syllabus Vsualization
20 SOM Development of Syllabus Vsualization System using Spherical Self-Organizing Maps 1090366 2009 3 5 SOM SOM(Self-Organizing Maps) SOM SOM SOM SOM SOM SOM i Abstract Development of Syllabus Vsualization
TC1-31st Fuzzy System Symposium (Chofu, September -, 15) cremental Neural Networ (SOINN) [5] Enhanced SOINN (ESOINN) [] ESOINN GNG Deng Evolving Self-
![TC1-31st Fuzzy System Symposium (Chofu, September -, 15) cremental Neural Networ (SOINN) [5] Enhanced SOINN (ESOINN) [] ESOINN GNG Deng Evolving Self-](/thumbs/78/78095837.jpg "TC1-31st Fuzzy System Symposium (Chofu, September -, 15) cremental Neural Networ (SOINN) [5] Enhanced SOINN (ESOINN) [] ESOINN GNG Deng Evolving Self-") TC1-31st Fuzzy System Symposium (Chofu, September -, 15) Proposing a Growing Self-Organizing Map Based on a Learning Theory of a Gaussian Mixture Model Kazuhiro Tounaga National Fisheries University Abstract:
TC1-31st Fuzzy System Symposium (Chofu, September -, 15) Proposing a Growing Self-Organizing Map Based on a Learning Theory of a Gaussian Mixture Model Kazuhiro Tounaga National Fisheries University Abstract:
")
 1 IDC Wo rldwide Business Analytics Technology and Services 2013-2017 Forecast 2 24 http://www.soumu.go.jp/johotsusintokei/whitepaper/ja/h24/pdf/n2010000.pdf 3 Manyika, J., Chui, M., Brown, B., Bughin,
1 IDC Wo rldwide Business Analytics Technology and Services 2013-2017 Forecast 2 24 http://www.soumu.go.jp/johotsusintokei/whitepaper/ja/h24/pdf/n2010000.pdf 3 Manyika, J., Chui, M., Brown, B., Bughin,
/HOHS‐01(基礎一次)")
2 3, 4, 5 6 2. [1] [2] [3]., [4], () [3], [5]. Mel Frequency Cepstral Coefficients (MFCC) [9] Logan [4] MFCC MFCC Flexer [10] Bogdanov2010 [3] [14],,,
![2 3, 4, 5 6 2. [1] [2] [3]., [4], () [3], [5]. Mel Frequency Cepstral Coefficients (MFCC) [9] Logan [4] MFCC MFCC Flexer [10] Bogdanov2010 [3] [14],,,](/thumbs/40/20501376.jpg "2 3, 4, 5 6 2. [1] [2] [3]., [4], () [3], [5]. Mel Frequency Cepstral Coefficients (MFCC) [9] Logan [4] MFCC MFCC Flexer [10] Bogdanov2010 [3] [14],,,") DEIM Forum 2016 E1-4 525-8577 1 1-1 E-mail: [email protected], [email protected], [email protected] 373 1.,, itunes Store 1, Web,., 4,300., [1], [2] [3],,, [4], ( ) [3], [5].,,.,,,,
DEIM Forum 2016 E1-4 525-8577 1 1-1 E-mail: [email protected], [email protected], [email protected] 373 1.,, itunes Store 1, Web,., 4,300., [1], [2] [3],,, [4], ( ) [3], [5].,,.,,,,
xx/xx Vol. Jxx A No. xx 1 Fig. 1 PAL(Panoramic Annular Lens) PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL
 PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL") PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
IPSJ SIG Technical Report Vol.2014-DBS-159 No.6 Vol.2014-IFAT-115 No /8/1 1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Info
![IPSJ SIG Technical Report Vol.2014-DBS-159 No.6 Vol.2014-IFAT-115 No /8/1 1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Info](/thumbs/101/149057081.jpg "IPSJ SIG Technical Report Vol.2014-DBS-159 No.6 Vol.2014-IFAT-115 No /8/1 1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Info") 1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Information Science and Technology, Osaka University a) [email protected] 1 1 Bucket R*-tree[5] [4] 2 3 4 5 6 2. 2.1 2.2 2.3
1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Information Science and Technology, Osaka University a) [email protected] 1 1 Bucket R*-tree[5] [4] 2 3 4 5 6 2. 2.1 2.2 2.3
(4) ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)
 ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)") (MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, [email protected], [email protected],
(MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, [email protected], [email protected],
BOK body of knowledge, BOK BOK BOK 1 CC2001 computing curricula 2001 [1] BOK IT BOK 2008 ITBOK [2] social infomatics SI BOK BOK BOK WikiBOK BO
![BOK body of knowledge, BOK BOK BOK 1 CC2001 computing curricula 2001 [1] BOK IT BOK 2008 ITBOK [2] social infomatics SI BOK BOK BOK WikiBOK BO](/thumbs/91/105171019.jpg "BOK body of knowledge, BOK BOK BOK 1 CC2001 computing curricula 2001 [1] BOK IT BOK 2008 ITBOK [2] social infomatics SI BOK BOK BOK WikiBOK BO") DEIM Forum 2012 C8-5 WikiBOK 252 5258 5 10 1 E-mail: [email protected], {kaz,masunaga}@si.aoyama.ac.jp, {yabuki,sakuta}@it.aoyama.ac.jp Body Of Knowledge, BOK BOK BOK BOK BOK, BOK Abstract Extention
DEIM Forum 2012 C8-5 WikiBOK 252 5258 5 10 1 E-mail: [email protected], {kaz,masunaga}@si.aoyama.ac.jp, {yabuki,sakuta}@it.aoyama.ac.jp Body Of Knowledge, BOK BOK BOK BOK BOK, BOK Abstract Extention
 27 28 2 15 14350922 1 4 1.1.................................... 4 1.2........................... 5 1.3......................... 6 1.4...................................... 7 2 9 2.1..........................
27 28 2 15 14350922 1 4 1.1.................................... 4 1.2........................... 5 1.3......................... 6 1.4...................................... 7 2 9 2.1..........................
3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)
![3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)](/thumbs/68/59204737.jpg "3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)") (MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
(MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
平成○○年度知能システム科学専攻修士論文
 A Realization of Robust Agents in an Agent-based Virtual Market Makio Yamashige 3 7 A Realization of Robust Agents in an Agent-based Virtual Market Makio Yamashige Abstract There are many people who try
A Realization of Robust Agents in an Agent-based Virtual Market Makio Yamashige 3 7 A Realization of Robust Agents in an Agent-based Virtual Market Makio Yamashige Abstract There are many people who try
27 YouTube YouTube UGC User Generated Content CDN Content Delivery Networks LRU Least Recently Used UGC YouTube CGM Consumer Generated Media CGM CGM U
 YouTube 2016 2 16 27 YouTube YouTube UGC User Generated Content CDN Content Delivery Networks LRU Least Recently Used UGC YouTube CGM Consumer Generated Media CGM CGM UGC UGC YouTube k-means YouTube YouTube
YouTube 2016 2 16 27 YouTube YouTube UGC User Generated Content CDN Content Delivery Networks LRU Least Recently Used UGC YouTube CGM Consumer Generated Media CGM CGM UGC UGC YouTube k-means YouTube YouTube
GUI(Graphical User Interface) GUI CLI(Command Line Interface) GUI
 GUI CLI(Command Line Interface) GUI") 24 GUI(Graphical User Interface) GUI CLI(Command Line Interface) GUI 1 1 1.1 GUI................................... 1 1.2 GUI.................... 1 1.2.1.......................... 1 1.2.2...........................
24 GUI(Graphical User Interface) GUI CLI(Command Line Interface) GUI 1 1 1.1 GUI................................... 1 1.2 GUI.................... 1 1.2.1.......................... 1 1.2.2...........................
BB 報告書完成版_修正版)040415.doc
040415.doc") 3 4 5 8 KW Q = AK α W β q = a + α k + βw q = log Q, k = log K, w = logw i P ij v ij P ij = exp( vij ), J exp( v ) k= 1 ik v i j = X β αp + γnu j j j j X j j p j j NU j j NU j (
3 4 5 8 KW Q = AK α W β q = a + α k + βw q = log Q, k = log K, w = logw i P ij v ij P ij = exp( vij ), J exp( v ) k= 1 ik v i j = X β αp + γnu j j j j X j j p j j NU j j NU j (
,, WIX. 3. Web Index 3. 1 WIX WIX XML URL, 1., keyword, URL target., WIX, header,, WIX. 1 entry keyword 1 target 1 keyword target., entry, 1 1. WIX [2
 DEIM Forum 2013 B10-4 Web Index 223-8522 3-14-1 E-mail: [email protected], [email protected], URL WIX, Web Web Index(WIX). WIX, WIX.,,. Web Index, Web, Web,, Related Contents Recommendation
DEIM Forum 2013 B10-4 Web Index 223-8522 3-14-1 E-mail: [email protected], [email protected], URL WIX, Web Web Index(WIX). WIX, WIX.,,. Web Index, Web, Web,, Related Contents Recommendation
[1] SBS [2] SBS Random Forests[3] Random Forests ii
![[1] SBS [2] SBS Random Forests[3] Random Forests ii](/thumbs/74/70333192.jpg "[1] SBS [2] SBS Random Forests[3] Random Forests ii") Random Forests 2013 3 A Graduation Thesis of College of Engineering, Chubu University Proposal of an efficient feature selection using the contribution rate of Random Forests Katsuya Shimazaki [1] SBS
Random Forests 2013 3 A Graduation Thesis of College of Engineering, Chubu University Proposal of an efficient feature selection using the contribution rate of Random Forests Katsuya Shimazaki [1] SBS
Run-Based Trieから構成される 決定木の枝刈り法
 Run-Based Trie 2 2 25 6 Run-Based Trie Simple Search Run-Based Trie Network A Network B Packet Router Packet Filtering Policy Rule Network A, K Network B Network C, D Action Permit Deny Permit Network
Run-Based Trie 2 2 25 6 Run-Based Trie Simple Search Run-Based Trie Network A Network B Packet Router Packet Filtering Policy Rule Network A, K Network B Network C, D Action Permit Deny Permit Network
Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3
![Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3](/thumbs/41/22750638.jpg "Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3") 36 Kitchen of the Future: Kitchen of the Future Kitchen of the Future A kitchen is a place of food production, education, and communication. As it is more active place than other parts of a house, there
36 Kitchen of the Future: Kitchen of the Future Kitchen of the Future A kitchen is a place of food production, education, and communication. As it is more active place than other parts of a house, there
一般演題(ポスター)
") 6 5 13 : 00 14 : 00 A μ 13 : 00 14 : 00 A β β β 13 : 00 14 : 00 A 13 : 00 14 : 00 A 13 : 00 14 : 00 A β 13 : 00 14 : 00 A β 13 : 00 14 : 00 A 13 : 00 14 : 00 A β 13 : 00 14 : 00 A 13 : 00 14 : 00 A
6 5 13 : 00 14 : 00 A μ 13 : 00 14 : 00 A β β β 13 : 00 14 : 00 A 13 : 00 14 : 00 A 13 : 00 14 : 00 A β 13 : 00 14 : 00 A β 13 : 00 14 : 00 A 13 : 00 14 : 00 A β 13 : 00 14 : 00 A 13 : 00 14 : 00 A
1 n =3, 2 n 3 x n + y n = z n x, y, z 3 a, b b = aq q a b a b b a b a a b a, b a 0 b 0 a, b 2
 n =3, 200 2 10 1 1 n =3, 2 n 3 x n + y n = z n x, y, z 3 a, b b = aq q a b a b b a b a a b a, b a 0 b 0 a, b 2 a, b (a, b) =1a b 1 x 2 + y 2 = z 2, (x, y) =1, x 0 (mod 2) (1.1) x =2ab, y = a 2 b 2, z =
n =3, 200 2 10 1 1 n =3, 2 n 3 x n + y n = z n x, y, z 3 a, b b = aq q a b a b b a b a a b a, b a 0 b 0 a, b 2 a, b (a, b) =1a b 1 x 2 + y 2 = z 2, (x, y) =1, x 0 (mod 2) (1.1) x =2ab, y = a 2 b 2, z =
DEIM Forum 2009 C8-4 QA NTT QA QA QA 2 QA Abstract Questions Recomme
 DEIM Forum 2009 C8-4 QA NTT 239 0847 1 1 E-mail: {kabutoya.yutaka,kawashima.harumi,fujimura.ko}@lab.ntt.co.jp QA QA QA 2 QA Abstract Questions Recommendation Based on Evolution Patterns of a QA Community
DEIM Forum 2009 C8-4 QA NTT 239 0847 1 1 E-mail: {kabutoya.yutaka,kawashima.harumi,fujimura.ko}@lab.ntt.co.jp QA QA QA 2 QA Abstract Questions Recommendation Based on Evolution Patterns of a QA Community
Microsoft Word - deim2011_new-ichinose-20110325.doc
 DEIM Forum 2011 B7-4 252-0882 5322 E-mail: {t08099ai, kurabaya, kiyoki}@sfc.keio.ac.jp A Music Search Database System with a Selector for Impressive-Sections of Continuous Data Aya ICHINOSE Shuichi KURABAYASHI
DEIM Forum 2011 B7-4 252-0882 5322 E-mail: {t08099ai, kurabaya, kiyoki}@sfc.keio.ac.jp A Music Search Database System with a Selector for Impressive-Sections of Continuous Data Aya ICHINOSE Shuichi KURABAYASHI
204 / CHEMISTRY & CHEMICAL INDUSTRY Vol.69-1 January 2016 047
 9 π 046 Vol.69-1 January 2016 204 / CHEMISTRY & CHEMICAL INDUSTRY Vol.69-1 January 2016 047 β γ α / α / 048 Vol.69-1 January 2016 π π π / CHEMISTRY & CHEMICAL INDUSTRY Vol.69-1 January 2016 049 β 050 Vol.69-1
9 π 046 Vol.69-1 January 2016 204 / CHEMISTRY & CHEMICAL INDUSTRY Vol.69-1 January 2016 047 β γ α / α / 048 Vol.69-1 January 2016 π π π / CHEMISTRY & CHEMICAL INDUSTRY Vol.69-1 January 2016 049 β 050 Vol.69-1




: u i = (2) x i Smagorinsky τ ij τ [3] ij u i u j u i u j = 2ν SGS S ij, (3) ν SGS = (C s ) 2 S (4) x i a u i ρ p P T u ν τ ij S c ν SGS S csgs
![: u i = (2) x i Smagorinsky τ ij τ [3] ij u i u j u i u j = 2ν SGS S ij, (3) ν SGS = (C s ) 2 S (4) x i a u i ρ p P T u ν τ ij S c ν SGS S csgs](/thumbs/91/106610562.jpg ": u i = (2) x i Smagorinsky τ ij τ [3] ij u i u j u i u j = 2ν SGS S ij, (3) ν SGS = (C s ) 2 S (4) x i a u i ρ p P T u ν τ ij S c ν SGS S csgs") 15 C11-4 Numerical analysis of flame propagation in a combustor of an aircraft gas turbine, 4-6-1 E-mail: [email protected], 2-11-16 E-mail: [email protected], 4-6-1 E-mail: [email protected],
15 C11-4 Numerical analysis of flame propagation in a combustor of an aircraft gas turbine, 4-6-1 E-mail: [email protected], 2-11-16 E-mail: [email protected], 4-6-1 E-mail: [email protected],
21 Pitman-Yor Pitman- Yor [7] n -gram W w n-gram G Pitman-Yor P Y (d, θ, G 0 ) (1) G P Y (d, θ, G 0 ) (1) Pitman-Yor d, θ, G 0 d 0 d 1 θ Pitman-Yor G
![21 Pitman-Yor Pitman- Yor [7] n -gram W w n-gram G Pitman-Yor P Y (d, θ, G 0 ) (1) G P Y (d, θ, G 0 ) (1) Pitman-Yor d, θ, G 0 d 0 d 1 θ Pitman-Yor G](/thumbs/89/99361107.jpg "21 Pitman-Yor Pitman- Yor [7] n -gram W w n-gram G Pitman-Yor P Y (d, θ, G 0 ) (1) G P Y (d, θ, G 0 ) (1) Pitman-Yor d, θ, G 0 d 0 d 1 θ Pitman-Yor G") ol2013-nl-214 No6 1,a) 2,b) n-gram 1 M [1] (TG: Tree ubstitution Grammar) [2], [3] TG TG 1 2 a) ohno@ilabdoshishaacjp b) khatano@maildoshishaacjp [4], [5] [6] 2 Pitman-Yor 3 Pitman-Yor 1 21 Pitman-Yor
ol2013-nl-214 No6 1,a) 2,b) n-gram 1 M [1] (TG: Tree ubstitution Grammar) [2], [3] TG TG 1 2 a) ohno@ilabdoshishaacjp b) khatano@maildoshishaacjp [4], [5] [6] 2 Pitman-Yor 3 Pitman-Yor 1 21 Pitman-Yor
Fuzzy Multiple Discrimminant Analysis (FMDA) 5) (SOM) 6) SOM 3 6) SOM SOM SOM SOM SOM SOM 7) 8) SOM SOM SOM GPU 2. n k f(x) m g(x) (1) 12) { min(max)
 5) (SOM) 6) SOM 3 6) SOM SOM SOM SOM SOM SOM 7) 8) SOM SOM SOM GPU 2. n k f(x) m g(x) (1) 12) { min(max)") SOM 1 2 2 3 1 (SOM: Self-Organizing Maps) 3 SOM SOM SOM SOM GPU A Study on Visualization of Pareto Solutions by Spherical Self-Organizing Maps MASATO YOSHIMI, 1 KANAME NISHIMOTO, 2 LUYI WANG, 2 TOMOYUKI
SOM 1 2 2 3 1 (SOM: Self-Organizing Maps) 3 SOM SOM SOM SOM GPU A Study on Visualization of Pareto Solutions by Spherical Self-Organizing Maps MASATO YOSHIMI, 1 KANAME NISHIMOTO, 2 LUYI WANG, 2 TOMOYUKI
& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
z.prn(Gray)
") 1. 90 2 1 1 2 Friedman[1983] Friedman ( ) Dockner[1992] closed-loop Theorem 2 Theorem 4 Dockner ( ) 31 40 2010 Kinoshita, Suzuki and Kaiser [2002] () 1) 2) () VAR 32 () Mueller[1986], Mueller ed. [1990]
1. 90 2 1 1 2 Friedman[1983] Friedman ( ) Dockner[1992] closed-loop Theorem 2 Theorem 4 Dockner ( ) 31 40 2010 Kinoshita, Suzuki and Kaiser [2002] () 1) 2) () VAR 32 () Mueller[1986], Mueller ed. [1990]
[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So
![[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So](/thumbs/76/74386745.jpg "[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So") 1,a) 2 2 1 2,b) 3,c) A choreographic authoring system reflecting a user s preference Ryo Kakitsuka 1,a) Kosetsu Tsukuda 2 Satoru Fukayama 2 Naoya Iwamoto 1 Masataka Goto 2,b) Shigeo Morishima 3,c) Abstract:
1,a) 2 2 1 2,b) 3,c) A choreographic authoring system reflecting a user s preference Ryo Kakitsuka 1,a) Kosetsu Tsukuda 2 Satoru Fukayama 2 Naoya Iwamoto 1 Masataka Goto 2,b) Shigeo Morishima 3,c) Abstract:

Vol.55 No (Jan. 2014) saccess 6 saccess 7 saccess 2. [3] p.33 * B (A) (B) (C) (D) (E) (F) *1 [3], [4] Web PDF a m
![Vol.55 No (Jan. 2014) saccess 6 saccess 7 saccess 2. [3] p.33 * B (A) (B) (C) (D) (E) (F) *1 [3], [4] Web PDF a m](/thumbs/92/108648363.jpg "Vol.55 No (Jan. 2014) saccess 6 saccess 7 saccess 2. [3] p.33 * B (A) (B) (C) (D) (E) (F) *1 [3], [4] Web PDF a m") Vol.55 No.1 2 15 (Jan. 2014) 1,a) 2,3,b) 4,3,c) 3,d) 2013 3 18, 2013 10 9 saccess 1 1 saccess saccess Design and Implementation of an Online Tool for Database Education Hiroyuki Nagataki 1,a) Yoshiaki
Vol.55 No.1 2 15 (Jan. 2014) 1,a) 2,3,b) 4,3,c) 3,d) 2013 3 18, 2013 10 9 saccess 1 1 saccess saccess Design and Implementation of an Online Tool for Database Education Hiroyuki Nagataki 1,a) Yoshiaki
1 913 10301200 A B C D E F G H J K L M 1A1030 10 : 45 1A1045 11 : 00 1A1100 11 : 15 1A1115 11 : 30 1A1130 11 : 45 1A1145 12 : 00 1B1030 1B1045 1C1030
 1 913 9001030 A B C D E F G H J K L M 9:00 1A0900 9:15 1A0915 9:30 1A0930 9:45 1A0945 10 : 00 1A1000 10 : 15 1B0900 1B0915 1B0930 1B0945 1B1000 1C0900 1C0915 1D0915 1C0930 1C0945 1C1000 1D0930 1D0945 1D1000
1 913 9001030 A B C D E F G H J K L M 9:00 1A0900 9:15 1A0915 9:30 1A0930 9:45 1A0945 10 : 00 1A1000 10 : 15 1B0900 1B0915 1B0930 1B0945 1B1000 1C0900 1C0915 1D0915 1C0930 1C0945 1C1000 1D0930 1D0945 1D1000
IPSJ SIG Technical Report Vol.2012-MUS-96 No /8/10 MIDI Modeling Performance Indeterminacies for Polyphonic Midi Score Following and
 MIDI 1 2 3 2 1 Modeling Performance Indeterminacies for Polyphonic Midi Score Following and Its Application to Automatic Accompaniment Nakamura Eita 1 Yamamoto Ryuichi 2 Saito Yasuyuki 3 Sako Shinji 2
MIDI 1 2 3 2 1 Modeling Performance Indeterminacies for Polyphonic Midi Score Following and Its Application to Automatic Accompaniment Nakamura Eita 1 Yamamoto Ryuichi 2 Saito Yasuyuki 3 Sako Shinji 2
No. 26 March 2016 IoT innovation IoT innovation 1 2 ICT Industry and IoT Innovation-Case Study of Competition and Cooperation between ICT and Automobi
 No. 26 March 2016 1 2 ICT Industry and IoT Innovation-Case Study of Competition and Cooperation between ICT and Automobile Industries Naoko Iwasaki, Toshio Obi Information and Communication Industry faces
No. 26 March 2016 1 2 ICT Industry and IoT Innovation-Case Study of Competition and Cooperation between ICT and Automobile Industries Naoko Iwasaki, Toshio Obi Information and Communication Industry faces

2005 1
 2005 1 1 1 2 2 2.1....................................... 2 2.2................................... 5 2.3 VSWR................................. 6 2.4 VSWR 2............................ 7 2.5.......................................
2005 1 1 1 2 2 2.1....................................... 2 2.2................................... 5 2.3 VSWR................................. 6 2.4 VSWR 2............................ 7 2.5.......................................
カルマンフィルターによるベータ推定( )
") β TOPIX 1 22 β β smoothness priors (the Capital Asset Pricing Model, CAPM) CAPM 1 β β β β smoothness priors :,,. E-mail: [email protected]., 104 1 TOPIX β Z i = β i Z m + α i (1) Z i Z m α i α i β i (the
β TOPIX 1 22 β β smoothness priors (the Capital Asset Pricing Model, CAPM) CAPM 1 β β β β smoothness priors :,,. E-mail: [email protected]., 104 1 TOPIX β Z i = β i Z m + α i (1) Z i Z m α i α i β i (the
3.1 Thalmic Lab Myo * Bluetooth PC Myo 8 RMS RMS t RMS(t) i (i = 1, 2,, 8) 8 SVM libsvm *2 ν-svm 1 Myo 2 8 RMS 3.2 Myo (Root
 i (i = 1, 2,, 8) 8 SVM libsvm *2 ν-svm 1 Myo 2 8 RMS 3.2 Myo (Root") 1,a) 2 2 1. 1 College of Information Science, School of Informatics, University of Tsukuba 2 Faculty of Engineering, Information and Systems, University of Tsukuba a) [email protected] 2.
1,a) 2 2 1. 1 College of Information Science, School of Informatics, University of Tsukuba 2 Faculty of Engineering, Information and Systems, University of Tsukuba a) [email protected] 2.
 11 22 33 12 23 1 2 3, 1 2, U2 3 U 1 U b 1 (o t ) b 2 (o t ) b 3 (o t ), 3 b (o t ) MULTI-SPEAKER SPEECH DATABASE Training Speech Analysis Mel-Cepstrum, logf0 /context1/ /context2/... Context Dependent
11 22 33 12 23 1 2 3, 1 2, U2 3 U 1 U b 1 (o t ) b 2 (o t ) b 3 (o t ), 3 b (o t ) MULTI-SPEAKER SPEECH DATABASE Training Speech Analysis Mel-Cepstrum, logf0 /context1/ /context2/... Context Dependent
(MIRU2008) HOG Histograms of Oriented Gradients (HOG)
 HOG Histograms of Oriented Gradients (HOG)") (MIRU2008) 2008 7 HOG - - E-mail: [email protected], {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
(MIRU2008) 2008 7 HOG - - E-mail: [email protected], {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human

258 5) GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System
 GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System") Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
DEIM Forum 2012 E Web Extracting Modification of Objec
 DEIM Forum 2012 E4-2 670 0092 1 1 12 E-mail: [email protected], {dkitayama,sumiya}@shse.u-hyogo.ac.jp Web Extracting Modification of Objects for Supporting Map Browsing Junki MATSUO, Daisuke
DEIM Forum 2012 E4-2 670 0092 1 1 12 E-mail: [email protected], {dkitayama,sumiya}@shse.u-hyogo.ac.jp Web Extracting Modification of Objects for Supporting Map Browsing Junki MATSUO, Daisuke