|
|
|
- とき ゆのもと
- 5 years ago
- Views:
Transcription
1 平成 27 年度修士論文 長距離ランナーの下肢の動作および筋活動とランニングエコノミーとの関係 電気通信大学情報理工学研究科知能機械工学専攻 岡田研究室 栗田崇平
2
3 目次 1. 緒言 1.1. 研究背景 1.2. 先行研究 1.3. 研究目的 方法 2.1. 研究方法 実験方法 計測方法 データ処理 統計処理 結果 3.1. 年齢, 身体特性, ランニングエコノミーおよびパフォーマンス 長距離ランナーの下肢動作の特徴 長距離ランナーの下肢筋活動の特徴 下肢の動作および筋活動とランニングエコノミーとの関係 考察 4.1. 得られたランニングエコノミーの妥当性 長距離ランナーの下肢の動作および筋活動の特徴 ランニングエコノミーに影響を及ぼすバイオメカニクス的要因 トレーニングへの提言 結言 5.1. まとめ 今後の課題 94 謝辞 参考文献 学会発表
4 1. 緒言 1.1. 研究背景 長距離走長距離走とは, 決められた長い距離をどれだけ短い時間で走れるかを競う陸上競技の種目であり, 紀元前 5 世紀の古代ギリシャ時代から行われていたことが知られている (Cavanagh,1990). 長距離走ではできるだけ高いスピードを出すことよりもある程度のスピードを維持することが求められる. 短距離走等の他の陸上競技の種目では先天的な能力によるところが大きいといわれる絶対スピードがより重視されるが, 長距離走では後天的に獲得される持久力や戦術がより強く要求される. したがって, トレーニングによりパフォーマンスを大きく高めることができることも特徴の 1 つである. 日本人にとって, 長距離走は重要なスポーツである.1964 年東京から 1992 年バルセロナまでのオリンピック 7 大会 (1980 年モスクワは日本が不参加 ) において, マラソンでメダル 3 個, 入賞 6 個を獲得し, 日本はマラソン大国と言われてきた ( 澤木,2013). しかし, その後はケニア人, エチオピア人に代表されるアフリカ系ランナーの台頭もあり,1996 年アトランタから 2012 年ロンドンまでの 5 大会においてメダル 0 個, 入賞 3 個と低迷している. さらに, 優勝者のタイムと日本人最高順位者のタイムを比較すると,1996 年アトランタ以降ではタイム差が大きく, スピードマラソンへの適応ができていないことから, 10000m の走力が重要であると指摘されている ( 澤木,2013). また, 澤木 (2013) は 2000 年以降における日本の実業団ランナーの 10000m と大学生の 10000m および高校生の 5000m の記録を比較し, 大学生の記録が実業団ランナーに接近し上回っている年もあること, 同時に高校生の 5000m 記録も著しく向上していることから, 大学生や高校生のトラックの記録が向上しているにもかかわらずマラソンの成績に直結していないことを報告している. このような状況を考えると, 日本の長距離界は伸び悩んでいるといえるであろう. 1
5 ランニングエコノミー長距離走では長時間に渡ってエネルギーを生成し続ける必要があり, このエネルギー量は酸素摂取量 (V O 2 ) でほぼ評価できることから, 最大酸素摂取量 (V O 2max ) についての研究が多くなされてきた ( 榎本,2013).V O 2max と長距離走パフォーマンスとの間には有意な相関関係が示されているが, これは対象の競技レベルが広い場合であり, 狭い範囲, 特に高い競技レベルのみを対象とした場合にはこの相関関係が有意ではなくなることが報告されている (Conley と Krahenbuhl,1980). この狭い範囲の高い競技レベルにおけるパフォーマンスを説明する要因として, ランニングエコノミー (Running Economy:RE) が注目されている (Conley と Krahenbuhl, 1980).RE はある走速度におけるエネルギー消費量の少なさ ( 走の経済性 ) を評価する変数であり,V O 2max では説明できなかった狭い競技レベルを対象とした場合のパフォーマンスと有意な相関関係があることが報告されている (Conley と Krahenbuhl,1980). さらに, 国際大会にて活躍しているケニアやエチオピアのランナーが優れた RE を獲得していることが明らかにされていることから ( 榎本ら,2010;Weston ら,2000),RE を高めるための研究が重要であると考えられる. 図子 (2005) は, 記録が低迷している長距離選手に対してプライオメトリクスを導入した結果, 再び記録が向上した 5 つの事例が存在することを報告した. また,Spurrs ら (2003) は, プライオメトリクストレーニングによって RE が改善したことを報告している. これらのことから,RE を高めることは日本の長距離界の伸び悩みを打破するための有効な手段になりうると考えられる 長距離走のバイオメカニクス長距離走パフォーマンスを向上させるために生理学的な研究が特に盛んに行われているが, 一方で, 体力要素だけではなく技術的な要素を追究するバイオメカニクス的な研究も重要であると考えられる. このことは,2012 年ロンドンオリンピック男子 10000m におい 2
6 てワンツーフィニッシュを果たしたモハメド ファラーとゲーレン ラップ,2015 年北京世界選手権男子 5000m において予選敗退ながらもアフリカ勢に唯一肉薄した日本人選手である大迫傑が所属しているナイキ オレゴンプロジェクトにてバイオメカニクスが重視されている (1859 Oregon Magazine,2013) ことからも言えよう. 長距離走ではより速いペースを維持して走ることが重要であるが, 実際のレースでは走行時間の経過に伴う疲労の蓄積やレースペースの変化などの要因が下肢の動作および筋活動に影響を与え, パフォーマンスを低下させることが経験的に知られており, 長距離ランナーの疲労や走速度に関するバイオメカニクス的研究が行われている. しかしながら, これらの多くの研究ではランニング中の 1 サイクルのみ ( 阿江ら,1986; 榎本ら,2010;Heise と Martin,1998; 丹治,2014; 丹治ら,2015;Williams と Cavanagh,1987), もしくは連続しない複数サイクル ( 榎本ら,1999;Kyröläinen ら,1999;Kyröläinen ら,2001; Kyröläinen ら,2005) が対象とされることが多い. このような手法では分析した区間におけるランナーの特徴を捉えることはできるが, 連続するサイクルにおける動作や筋活動の変動や走行時間経過に伴う変化について言及することができず, 長時間の循環運動である長距離走の全容を捉えることはできない. さらに, パフォーマンスレベル間での比較をした研究が少ないことも課題であると考えられる. 実際のレースを分析し, パフォーマンスが高かったランナーと低かったランナーとで比較を行った研究はあるが ( 榎本ら,1999; 伊藤ら,1998), この比較では当然ながら走速度が異なっている. ランニングの下肢の動作および筋活動は走速度による影響を強く受けるため, 同じ速度において比較を行わなければ得られた結果がパフォーマンスによる差であるのか, 単に走速度による差であるのかを区別することができない. 走速度の変化に伴う下肢の動作および筋活動の変化を報告している研究も多いが ( 阿江ら,1986; Kyröläinen ら,1999;Kyröläinen ら,2001;Kyröläinen ら,2005;Lieberman ら,2006; Moore ら,2013;Nilsson ら,1985), これらの結果では高い走速度を維持するための知見 3
7 を提供するに留まっている. 榎本ら (2010), 丹治 (2014), 丹治ら (2015), Williams と Cavanagh(1987) は同じ走速度において長距離ランナーの下肢動作を複数の群分けを行って比較しているが, 先述したように 1 サイクルのみの分析である. したがって, 複数サイクルに渡って同じ走速度における長距離ランナーの下肢の動作および筋活動を調査した研究は非常に少なく, 全容を捉えた上でパフォーマンスを向上させるための知見を提供できているとは言い難い ランニングエコノミーとバイオメカニクス RE の注目に伴い,RE に関するバイオメカニクス的な研究も盛んに行われている. Halvorsen ら (2011), Santos-Concejero ら (2014), 丹治 (2014), 丹治ら (2015) および Williams と Cavanagh(1987) は,RE に関わる下肢動作を部分的あるいは包括的に調査し, 経済性の高いランナーの特徴を報告している. しかしながら, 下肢動作のみでは, 筋の弾性エネルギーの再利用, 二関節筋によるエネルギーの伝達, アイソメトリックな筋活動, 共収縮による主働筋と拮抗筋の影響を考慮できないため (Frost ら,2002; 関,2015), より原因的な要素である下肢筋活動も含めて RE への影響を調査すべきであろう. 下肢筋活動に関する研究として,Kyröläinen ら (2001) は,RE に関わる下肢の動作および筋活動を調査し, 支持期の大腿二頭筋および腓腹筋の活動量が RE と有意な正の相関であったことを示したが, これら以外に RE に関わる変数を見つけられなかったとも報告した. また,Heise ら (2008) と Moore ら (2013) のように, 同様の手法にて RE との関係を調査しているにもかかわらず, 互いに矛盾した結果も報告されていることから,RE に関係するバイオメカニクス的変数, 特に下肢筋活動が明確になっているとは言い難い. この原因として, 低い走速度において計測されたバイオメカニクス的変数を用いている, 一部の変数のみとの関係を評価しているという点が挙げられる. 低い走速度において計測されたバイオメカニクス的変数では, 低い走速度がアスリートランナーのレースペースか 4
8 らかけ離れているため, 実際のレースにおいて高い RE を獲得するための知見とは成り得ないと考えられる. この背景としては, 被験者としてアスリートを集めにくく, 高い走速度での実験を行えないことや, 一般的に RE はある走速度におけるV O 2 として評価される (Conley と Krahenbuh,1980;Heise ら,1996;Heise と Martin,1998;Heise ら,2008; Moore ら,2013;Santos-Concejero ら,2014;Spurrs ら,2003;Weston ら,2000;Williams と Cavanagh,1987) ため, アスリートのレースペースのような無酸素性エネルギーが関与する運動強度でエネルギー消費量を定量するスタンダードな手法が確立されていないことなどが考えられる. また, RE には様々な要素が関わっていると考えられるため,RE と一部の変数のみとの関係を評価するだけでは評価が妥当でないと考えられる. 多くの研究では下肢動作のみ ( 榎本ら,2010;Halvorsen ら,2011;Heise と Martin,1998;Santos-Concejero ら,2014; 丹治,2014; 丹治ら,2015;Williams と Cavanagh,1987), もしくは下肢筋活動のみ (Frost ら,1997;Heise ら,1996;Heise ら,2008;Moore ら,2013) と RE との関係を分析することが多く, 下肢動作, 下肢筋活動,RE を同時に分析していない. さらに, 算出された変数と RE との関係を単回帰分析によって単体で調査することが多く ( 榎本ら,2010;Heise ら,1996;Heise と Martin,1998;Heise ら,2008;Kyröläinen ら,2001;Moore ら, 2013;Santos-Concejero ら,2014), 包括的に調査されているとは言えない. したがって, 走速度や算出している変数の数などを断片的に分析していることが,RE に関係するバイオメカニクス的変数が明らかになっていない理由の 1 つであろう 長距離走に関するバイオメカニクス的研究の他分野における意義現代の長距離走は一般市民にとっても重要なスポーツとなっている. 毎年,1 月 2 日から 3 日にかけて行われる東京箱根間往復大学駅伝競走大会 ( 箱根駅伝 ) は, テレビ視聴率が 20 % 近くにもなり, 沿道の観衆が十数万人に及ぶと言われる国民的一大イベントとして認 5
9 識されている ( 渋谷,2009). また, 現代社会においては高齢化に伴う医療費の増大が大きな問題となっており, 高血圧や糖尿病などの生活習慣病の発症予防や改善のために運動習慣が重要であることが指摘されている ( 岡本ら,2010). このような競技に対する人気や健康志向の増加, 手軽さなどの理由から, ジョギングやランニングを行う人が増加しており, 一般市民参加型のマラソン大会が地域や学校の単位などで多く開催されている. このように, 現在のスポーツは競技として競い合うだけでなく, 教育のため, 健康のため, 楽しむためなど多目的であり, 我々の生活の中で様々な役割を果たすようになってきている. しかしながら, 運動を継続できない人が多くいることから ( 岡本ら,2010), アスリートランナーのみならずファンランナーにおいても, ジョギングやランニングを続けるためのモチベーションとして体力の増進や記録の向上が必要であると考えられる. 工学分野においても長距離走は重要な役割を果たしていると考えられる. 映画やゲームのようなエンターテインメントにおいて, 登場人物がより人間らしい動作であることは重要であろう. 現在ではロボットの開発も積極的に行われているが, 支えなしに自立して走ることができるヒューマノイドはまだ開発されておらず, 将来的に人間社会にロボットが溶けこむためにはより人間らしい動きをすることが重要である. また, 画像認識によりランニングの特徴点を抽出することで, 危険な場所において警報を鳴らすシステムを開発し, 安全を確保することも可能であると考えられる. このように, 長距離走は, 工学分野においては基礎研究の対象として重要な役割を担っているといえる 先行研究 ランニングエコノミーに関する研究ランニングエコノミー (Running Economy:RE) とは, ある走速度におけるエネルギー消費量の少なさ ( 走の経済性 ) を評価する変数である.Conley と Krahenbuhl(1980) は, 全国的に著名なレースにおいて 19 位以内であった 12 人のランナーを対象に,RE,V O 2max, 6
10 10km 走の記録との関係を調査した. この結果,V O 2max が 71.7±2.8 [ml/kg/min],10km 走の記録が 32.1±1.0 [min] と狭い範囲にあり,V O 2max と 10km 走の記録とには有意な相関が認められなかった. 一方,241,268,295 [m/min] におけるV O 2 と 10km 走の記録とには, いずれも有意な正の相関が認められた. このことから, よくトレーニングされた経験のあるランナーはみな同様のV O 2max であるため,RE が 10km 走のパフォーマンスを説明する有意な要素であると結論づけた. ただし,V O 2max が重要でない訳ではなく,RE は同程度の高いV O 2max であるランナーのパフォーマンスだけを説明するとも述べている. Weston ら (2000) は, 同程度のレース記録, 体重, 年齢, 体脂肪, 大腿の体積を持つアフリカ人ランナー 8 名および白人ランナー 8 名を対象に,16.1 [km/h] の定速および各被験者の 10km 走のレースペースにおける 6 分間走を行わせ, 心拍数, 呼吸交換比 (Respiratory Exchange Ratio:RER),V O 2, 換気量を収集した. この結果, アフリカ人ランナーはV O 2peak が有意に 13 % 低いが, 定速におけるV O 2 は有意に 5 % 低く経済的であり,V O 2peak に対する V O 2 の割合が有意に高かった. このことから, これらの違いの原因を明確にすることはできないが, エリートアフリカ人ランナーの高いパフォーマンスの説明につながると結論づけた. Medbø ら (1988) は, 超最大下のランニングにおける無酸素性パワーを総酸素借を用いて定量した. この過程で, 最大下における運動強度とV O 2 との直線関係によってエネルギー需要量を外挿しており, この時に得られた回帰直線の傾きが RE を表すと報告した. しかし, この回帰直線を妥当に得るためには異なる運動強度から得られた少なくとも 10 個のサンプルが必要であるため, 簡便に回帰直線を求める手法をも提案した. その方法は,2 個のサンプルを用いて回帰直線を求め, 切片を 5 [ml/kg/min] で固定するというものである. もし, 切片とこれら 2 個のサンプルをそれぞれ通る 2 本の回帰直線の傾きの差が 3 % 以上であった場合には, サンプルをもう 1 個増やすべきであると報告している. これらの研究では,RE をV O 2 のみから算出しているが, これには問題があることが指摘 7
11 されている.Fletcher ら (2009) は, 最大下の 3 種類の走速度におけるV O 2 と RER を考慮したエネルギー消費とを比較し,V O 2 は走速度間における有意差が認められなかったのに対し,RER を考慮したエネルギー消費は走速度の増加に伴い有意に増加したと報告した. エネルギー消費は, エネルギー基質 ( 糖代謝と脂質代謝の比率 ) によって異なるため,V O 2 を用いてエネルギー消費を算出する際には RER を考慮すべきと結論づけている. 丹治 (2014) および丹治ら (2015) は,LT レベルを超える運動強度における RE を評価するために,RER および血中乳酸値を用いてV O 2 からエネルギー消費を計算した. この結果, エネルギー消費が走速度の 1.05 乗に比例しており, 被験者の 5000m シーズン記録とエネルギー消費にも有意な相関が認められたことを報告した. しかしながら, この手法では侵襲的に被験者から血中乳酸を取得する必要がある. 以上のことから,RE を評価するにはある走速度におけるV O 2 が利用されることが多いが, エネルギー基質が考慮されていないことが多い. また, アスリートのレースペースのような無酸素性エネルギーが関与する高強度運動にも対応したスタンダードな RE の算出手法は確立されていないのが現状である 長距離走のバイオメカニクスに関する研究阿江ら (1986) は, 幅広い走速度におけるランニングを詳細な局面分けを行った上で分析し, 遊脚期における膝関節は二峰性の負のパワーを発揮していること, これが走速度の増加に伴い著しく増加することを報告した. これにより, 遊脚期前半における膝関節の屈曲時には膝関節伸展筋群が, 後半における膝関節の伸展時には膝関節屈曲筋群が力学的エネルギーを吸収することで下腿の過度な回転を抑制して脚の回転を早め, 足の接地位置が身体重心に近づきブレーキが小さくなると考察している. Kyröläinen ら (1999) は, 室内のトラックにて幅広い走速度における下肢筋活動と地面反力の変化を調査し, 走速度の増加に伴い増加する着地衝撃に耐えるためには, 股関節お 8
12 よび膝関節の伸展筋群, 足関節底屈筋群の大きな活動が必要であり, 接地直前および制動局面の脚伸展筋群の大きな活動が不要な重心の落ち込みを防ぐと報告した. また, 彼らは走速度の増加に伴い接地前後において外側広筋と大腿二頭筋, 腓腹筋と前脛骨筋の共収縮が増加したこと, 大腿二頭筋の活動量が増加し活動時間が長くなったこと, 地面反力が増加し合成地面反力の向きが水平に近づいたことを報告している. このことから, 走速度の増加に伴う最適な方向への大きな力発揮にはハムストリングスの活動が重要であり, 支持期初期において増加した膝関節および足関節の剛性が推進局面の大きな張力発揮に貢献していると述べている. Lieberman ら (2006) は, 歩行およびランニングにおける大殿筋の活動を複数の速度に渡って調査し, 大殿筋は股関節が屈曲位で活動する筋であること, 歩行では活動が小さいもののランニングでは大きいことから, 大殿筋の役割はランニング時の大腿を減速させることであると考察した. Nilsson ら (1985) は, トレッドミル上の歩行およびランニングの速度増加に伴う下肢の動作および筋活動の変化ついて調査し, 様々な結果を報告している. この中で筋の活動時間については, 速度増加に伴い外側広筋, 腓腹筋外側頭および前脛骨筋の 1 サイクル時間に対する活動時間の割合が増加し, 特に前脛骨筋は高い速度において 1 サイクル時間の大半を占めていることを明らかにした. 以上のことから, 走速度の増加に伴う下肢の動作および筋活動は明らかになっているが, これらの知見はあくまでも高い走速度で走るためのものであり, パフォーマンスが異なる個人間での比較などをしなければ真にパフォーマンスを向上させるための知見とはなり得ないであろう. また, 分析対象のサイクルが阿江ら (1986) は 1 サイクルのみ,Kyröläinen ら (1999) は連続しない複数サイクルであることから, 長距離走の全容を捉えた結果であるとは言い難い. 伊藤ら (1998) は,100m のレースを分析し, 疾走速度と脚全体 ( 股関節と足関節を結 9
13 ぶ線分 ) の最大角速度との有意な正の相関, 膝関節の最大伸展および足関節の最大底屈角速度との有意な負の相関を示した. これにより, 膝関節を固定し, 脚全体のスイング速度と股関節の伸展角速度との差を小さくし, より重心を前に運ぶこと, 足関節を固定し, 股関節の力を地面に伝えることが合理的なキック動作であることを報告した. また, 疾走速度と脚全体の最大振り戻し角速度には有意な正の相関がみられたことから, 振り戻し動作はその後に続く支持期における脚のスイング速度を予め高め, 高い疾走速度を得るために股関節筋群によって積極的に行われるべき重要な動作であると述べている. しかし, この研究は榎本ら (1999) と同様に実際のレースを分析しているため, 被験者ごとに走速度が異なっている. したがって, 得られた結果がパフォーマンスによる差であるのか, 単に走速度の違いによる差であるのかを区別することはできない ランニングエコノミーおよび下肢動作に関する研究 Williams と Cavanagh(1987) は,RE に影響する要因を最初に包括的に検証した研究者である ( 榎本,2013). 彼らは, 地面反力, パワー, エネルギー転移量, キネマティクス変数などを説明変数,RE を目的変数とする重回帰分析を行い, 決定係数が 54 % であったことを示している. また, 経済性の高いランナーの特徴として, 接地時に下腿がより後傾し, 体幹がより前傾し, 離地時の足関節の底屈が小さく, 支持期中に膝関節がより屈曲し, 支持期中の膝関節中心の前方への最小速度が小さく, 手首の軌跡が短く, 重心の上下動が小さいことを示している. Arellano と Kram(2014) は, 地面反力を計測できるトレッドミルを開発し, ランニングの様々な動作を制限もしくは補助することによるエネルギーの変化を調査した. この結果, 支持期の体重のサポートによって %, 推進によって %, 脚のスイングによって 7 %, 左右のバランスによって 2 % のエネルギーが消費されることを報告した. Halvorsen ら (2011) は, 重心の上下動およびステップ頻度を意図的に変化させた場合 10
14 のエネルギー消費への影響を調査し,V O 2 はステップ頻度とは負の相関, 重心の上下動とは正の相関であったことを報告した. さらに,V O 2 はステップ頻度と重心の上下動との積とは正の相関, 重心の高さとは負の相関があったことから, 重心変位が RE に影響していると述べている. Heise と Martin(1998) は, トレッドミル上にて 6 分間走を行わせた際に計測したV O 2 と, グラウンド上にてトレッドミル上と同程度の速度 (±3 %) による計測から算出した脚全体の剛性との関係を調査した. この結果, 鉛直方向の剛性とV O 2 とに負の相関, この剛性によって出力されたパワーとV O 2 とに正の相関が認められたことから, 経済的なランナーは高い剛性を持っていることが明らかになった. 榎本ら (2010) は, ケニア人ランナーと日本人ランナーを対象とし, 血液, 体格, 筋横断面積, トレッドミル上での生理学的変数, 走行路でのバイオメカニクス的変数について調査した. この結果, ケニア人ランナーを日本人ランナーと比較すると, 生理学的特徴として乳酸閾値やV O 2max に大きな差はなかったが,RE に優れており高い走速度でのトレッドミル走において主観的運動強度 (Rate of Perceived Exertion:RPE) が低く, 楽に走ることができること, 体格的特徴として下腿が細長いが脚を前後にスイングすることへの影響は小さく, 慣性モーメントはむしろ日本人の方が小さかったこと, 離地後の脚の前方へのスイング開始あたりで大きな股関節屈曲トルクをタイミングよく発揮していることが明らかになった. このことから, ケニア人ランナーは, 脚全体の股関節まわりの慣性モーメントが大きくなる離地直後に大きな股関節屈曲トルクを発揮し, 前方へのスイングが始まると下腿を大腿に引き付け脚全体の慣性モーメントを小さくして前方へのスイング速度を効果的に高めていると考察している. 丹治 (2014) および丹治ら (2015) は,LT を超える高強度運動における RE をV O 2,RER および血中乳酸を用いて算出し, これを目的変数, 関節角度, 関節角速度, 地面反力, 関節トルクを説明変数とする重回帰分析を行った. この結果, 経済性の高いランナーは, 足 11
15 関節が過度に底屈していない, 膝関節の屈曲が大きい, 股関節の外旋が小さく接地時に内旋している, 股関節伸展トルクを大きく発揮していることが明らかになった. 榎本ら (1999) は,RE には生理学的エネルギーから力学的エネルギーへの変換と力学的エネルギーから有効エネルギーへの変換の 2 つの過程が含まれていることから, 純粋に走動作を評価するために RE ではなく走の有効性指数 (Effectiveness Index:EI) を使用し, 5000m レースの 2000m 地点および 4000m 地点における 1 サイクルを対象に高い EI を持つランナーの特徴を調査した. この結果,EI の高いランナーは, 両脚間での力学的エネルギーの伝達が大きく, 体幹になされた力学的仕事が小さく, 支持期前半における身体重心の低下および減速が小さいことが明らかになった. この一方で, 下肢動作のみでは RE を評価しきれないという報告もある. 関 (2015) は, ランニング中に生み出された力学的仕事を関節トルクパワーによる方法と力学的エネルギーによる方法とで算出した. この結果, 両者によって算出された力学的仕事には有意差が認められ, ほとんどの項目において生理学的変数との有意な相関関係が得られなかったと報告している. 彼はこの原因として, 剛体リンクモデルによる力学的仕事の算出においては, 筋の弾性エネルギーの再利用, 二関節筋によるエネルギーの伝達, 共収縮による主働筋と拮抗筋とのトルク発揮の相殺を考慮できないことを挙げている. Frost ら (2002) は,7-16 歳の子供に複数の速度における歩行およびランニングを行わせ,V O 2 と効率を目的変数, 力学的仕事, エネルギー転移量, 大腿および下腿に関わる筋の共収縮の程度, ステップ頻度および年齢を説明変数とする重回帰分析を行った. この結果, 年齢が最も良い予測因子であり, どの走速度におけるモデルにも共収縮が含まれていたが, 効率を説明する際の標準偏回帰係数がV O 2 を説明する際よりも小さかったこと, 幼い子供の方が大きかったことから, 関節を安定させる共収縮は年齢によるV O 2 の違いを説明する上で重要な要素であるが効率においては重要ではないこと, 不必要な拮抗筋の活動はエネルギーの無駄であることを明らかにした. また, 力学的仕事およびエネルギー転移量が説明変 12
16 数としてあまり残らなかったこと, 年齢間における力学的仕事およびエネルギー転移量に有意差が認められなかったことから, 移動運動におけるエネルギー消費は, 力学的仕事およびエネルギー転移量では定量できず, 弾性エネルギーの貯蔵, 拮抗筋の共収縮, アイソメトリックな筋活動が影響していると考察している. さらに,1,2 番目に高い走速度におけるV O 2 とステップ頻度との負の相関を報告し, ある 1 つの走速度における重回帰分析の説明変数が他の走速度における結果と大きく異なっていたことから, この違いを説明することは難しいと述べている. 以上のことから,RE に影響を及ぼす下肢動作は明らかになりつつあり, 現場において動作に関する指導をする際には有効であると考えられる. しかし, 下肢動作のみでは考慮できない要因が指摘されていることから,RE への影響を考える上では下肢動作のみではなく下肢筋活動も考慮すべきであろう ランニングエコノミーおよび下肢筋活動に関する研究 Kyröläinen ら (2001) は,12-13 種類の幅広い走速度において RE と下肢の動作および筋活動の関係を調査し, 支持期の大腿二頭筋および腓腹筋の活動量に RE と有意な正の相関があり, 膝関節および足関節筋群の共収縮が関節の剛性を高め, このことが優れた RE に関係している可能性を報告している. しかしながら, これら以外に RE に関わる変数を見つけられなかったとも述べている. Heise ら (1996) は, トレッドミル上で 10 分間走を行わせ, 筋活動の開始時間, 活動時間, 共収縮時間と RE との関係を調査した. その結果, 大腿直筋の遊脚期における活動の開始時間とV O 2 に有意な正の相関があったこと, 有意ではないものの二関節筋である大腿直筋とハムストリングスおよび腓腹筋との共収縮時間とV O 2 には負の相関があったことから, 二関節筋同士の共収縮は同時に複数の関節を固定できるため経済性に貢献する可能性を示唆している. また, 彼らは, その後の研究にて支持期の大腿直筋および腓腹筋の共収縮時間 13
17 が,V O 2 と有意な負の相関であったことも報告し, これらの筋の共収縮が近位から遠位関節への力学的エネルギーの転移に貢献すると考察している (Heise ら,2008). 一方,Moore ら (2013) は, 複数の走速度において共収縮時間とV O 2 との関係を Heise ら (2008) と同様の方法にて調査したが, 有意な相関関係が全て正であったことから, 共収縮は RE に悪影響であると述べている. Frost ら (1997) は,7-16 歳の子供を対象に歩行およびランニングを行わせ, 年齢により被験者を 3 群に分けることで, エネルギー消費と大腿および下腿に関わる筋の共収縮の変化を調べた. その結果, 最も幼い群においてエネルギー消費および共収縮が最も大きいため, 共収縮がエネルギー消費の増大につながることを報告した. この一方で, 彼らは共収縮が歩行およびランニングにおいて全く不要というわけではなく, 体重を受け止める局面においては関節の安定に貢献するとも考察している. すなわち, 遊脚期においては体重を支えるような大きな関節の安定は不要であり, 遊脚期の共収縮が余計なエネルギー消費を招いていると考えられる. 以上のように,RE に影響する下肢筋活動は調査されてはいるものの,Heise ら (2008) と Moore ら (2013) との結果の矛盾に代表されるように, 明確になっているとは言い難い. また, 実験時の走速度は,Heise ら (1996) が 4.13 [m/s],heise ら (2008) が 3.04 [m/s], Moore ら (2013) が [km/h],frost ら (1997) が [m/s] と Kyröläinen ら (2001) の [m/s] を除いて低い. したがって, 幅広い走速度において計測された変数を用いることが必要であり, 下肢筋活動は下肢動作と比較して包括的に解析されていないため, 様々な要因について検討することが求められよう. これらの先行研究から, 長距離ランナーの特徴を複数サイクルに渡って捉え, かつ同じ走速度において解析することで, 真にパフォーマンスを向上させるための知見を提供できると考えられる. さらに,RE に影響するバイオメカニクス的変数を明らかにするためには, アスリートのレースペースのような高い走速度を含め, 下肢の動作および筋活動から様々 14
18 な変数を算出して包括的に解析することが必要であると考えられる 研究目的本研究の目的は以下の 2 つである. 1 つ目は, 長距離ランナーの下肢の動作および筋活動の特徴を明らかにすることである. 2 つ目は, 下肢の動作および筋活動,RE を包括的に解析することにより, 長時間走行中の下肢の動作および筋活動が RE に及ぼす影響を明らかにすることである. 15
19 2. 方法 2.1. 研究方法鍛錬者と非鍛錬者を対象にトレッドミル上で複数の速度で 4 分間走を行わせ, 連続した複数サイクルにおける下肢の 3 次元動作解析および筋電図学的解析, 呼気の生理学的解析を行った. また, 鍛錬者と非鍛錬者の違い, 下肢の動作および筋活動が RE に及ぼす影響について検討した. 日常的に長距離走トレーニングを行っており, 月間走行距離が概ね 300 [km] 以上の青年男性 12 名 (Trained) および長距離走トレーニングを行っていない青年男性 10 名 (Untrained) の計 22 名を被験者とした. 表 2-1 は, 被験者の年齢および身体特性を示したものである. 被験者には事前に研究の目的, 方法, 意義, 危険性などを説明し, 研究参加への同意を得た後に実験を行った. なお, 被験者には実験当日の激しい運動や, 前日の飲酒は控えるよう指示した. Table 2-1 Characteristics of the subjects Trained (n=12) Mean±SD Untrained (n=10) Mean±SD Age [yrs] 21.8± ±1.4 Height [cm] 172.2± ±5.0 Body Mass [kg] 62.0± ± m Season Best Record [min s ] ± 実験方法 一定負荷走行実験 実験は, トレッドミル上にて 4 分間の一定負荷 ( 速度 ) 走行実験を 4-6 セット実施した. 16
![走速度は,Trained には 180,210,240,270,300,330 [m/min] の 6 速度を,Untrained には 150,180,210,240 [m/min] の 4 速度を設定した.](/docs-images/92/108796075/images/20-0.jpg "なお, いずれかの速度が完走できなかった場合には次に高い速度での走行は行わなかったが,Untrained で最も高い速度を完走でき, かつ余裕が見られた場合には, さらに 30 [m/min] 高い速度での走行を行った. また, セット間には 7 分間以上の十分な休息を挟み, 走速度の順序はランダムとした.")
20 走速度は,Trained には 180,210,240,270,300,330 [m/min] の 6 速度を,Untrained には 150,180,210,240 [m/min] の 4 速度を設定した. なお, いずれかの速度が完走できなかった場合には次に高い速度での走行は行わなかったが,Untrained で最も高い速度を完走でき, かつ余裕が見られた場合には, さらに 30 [m/min] 高い速度での走行を行った. また, セット間には 7 分間以上の十分な休息を挟み, 走速度の順序はランダムとした. 走行中には, 光学式 3 次元モーションキャプチャシステムを用いて下肢動作を計測し, 同時に表面筋電図 (Electro MyoGraphy:EMG) により下肢筋活動を得た. また,RE を得るために呼気を採取した. トレッドミル後方にはロータリーエンコーダーを設置し, トレッドミルのベルト速度を計測した. 図 2-1 は, 実際の実験の様子を示したものである. Fig. 2-1 Experimental view 17
 を行わせ, EMGにより筋活動を計測した.")
![股関節伸展および膝関節屈曲は腹臥位で股関節 180 [deg], 膝関節 180 [deg], 足関節 90 [deg] の姿勢で, 膝関節伸展および足関節背屈は座位で股関節 90 [deg], 膝関節](/docs-images/92/108796075/images/21-1.jpg "90 [deg], 足関節 90 [deg] の姿勢で, 足関節底屈は立位で股関節 180 [deg], 膝関節 180 [deg], 足関節 90 [deg] の姿勢で行った.")

21 最大随意収縮走行実験後, 被験者に股関節伸展, 膝関節伸展, 膝関節屈曲, 足関節底屈および足関節背屈の等尺性最大随意収縮 (Isometric Maximal Voluntary Contraction:MVC) を行わせ, EMGにより筋活動を計測した. 股関節伸展および膝関節屈曲は腹臥位で股関節 180 [deg], 膝関節 180 [deg], 足関節 90 [deg] の姿勢で, 膝関節伸展および足関節背屈は座位で股関節 90 [deg], 膝関節 90 [deg], 足関節 90 [deg] の姿勢で, 足関節底屈は立位で股関節 180 [deg], 膝関節 180 [deg], 足関節 90 [deg] の姿勢で行った. 図 2-2は,MVCにおける被験者の姿勢を示したものである. どの試技においても関節角度が変化しないように検者が徒手により固定した. なお, 実験前には被験者に試技内容を確認し, 複数回の練習を経てから計測を行った. Fig. 2-2 Posture of subjects during MVC(upper left: knee extension and ankle dorsi- flexion, upper right: ankle plantar flexion, bottom: hip extension and knee flexion) 18
 を用いて走行中のマーカーの3 次元座標を250 [Hz] で計測した.")
22 2.3. 計測方法 呼吸代謝測定装置被験者の顔にフェイスマスクを取り付け, 図 2-3の呼吸代謝測定装置 (VO2000,S&ME 社製 ) を用いて走行中の酸素摂取量 (V O 2 ) および二酸化炭素排出量 (V CO 2 ) を3 呼吸ごとに収集した. フェイスマスクを取り付ける際には, 被験者の呼気がマスクから漏れていないことを確認した. Fig. 2-3 Respiratory metabolism measurement device 光学式モーションキャプチャシステム頸椎点, 胸骨上縁, 左右大転子, 左右大腿骨外側上顆, 左右外果, 左右踵骨および左右第 5 中足骨粗面に再帰性反射マーカーを貼付し, 光学式 3 次元モーションキャプチャシステム (Optitrack S250e,Natural Point 社製 ) を用いて走行中のマーカーの3 次元座標を250 [Hz] で計測した. モーションキャプチャシステムは, 図 2-4の赤外線カメラ10 台から構成され, トレッドミルを囲むように配置した. 19
 を参考にして被験者の右脚の大腿直筋 (Rectus Femoris: RF), 外側広筋 (Vastus Lateralis:VL), 大殿筋 (Gluteus Maximus:GMX), 大腿二頭筋長頭 (Biceps Femoris Caput Longum:BF), 半腱様筋 (Semitendinosus:ST), 前脛骨筋")
23 Fig. 2-4 Infrared camera(reference: Natural Point Inc.) 表面筋電図図 2-5のように, 下野 (2004) を参考にして被験者の右脚の大腿直筋 (Rectus Femoris: RF), 外側広筋 (Vastus Lateralis:VL), 大殿筋 (Gluteus Maximus:GMX), 大腿二頭筋長頭 (Biceps Femoris Caput Longum:BF), 半腱様筋 (Semitendinosus:ST), 前脛骨筋 (Tibialis Anterior:TA), 腓腹筋内側 (Gastrocnemius Medialis:GAM) およびヒラメ筋 (Soleus:SO) の計 8 筋に表面電極 ( ディスポーザブル電極 ) を貼り, その上に図 2-6のワイヤレスEMGプローブ (Free EMG,BTS Bioengineering 社製 ) を装着し, 走行中およびMVC 中の表面筋電図を2000 [Hz] で計測した. 計測した筋電位は,EMGワイヤレス電極プローブから無線で図 2-7の携帯端末を経由してPCに送信された. 20



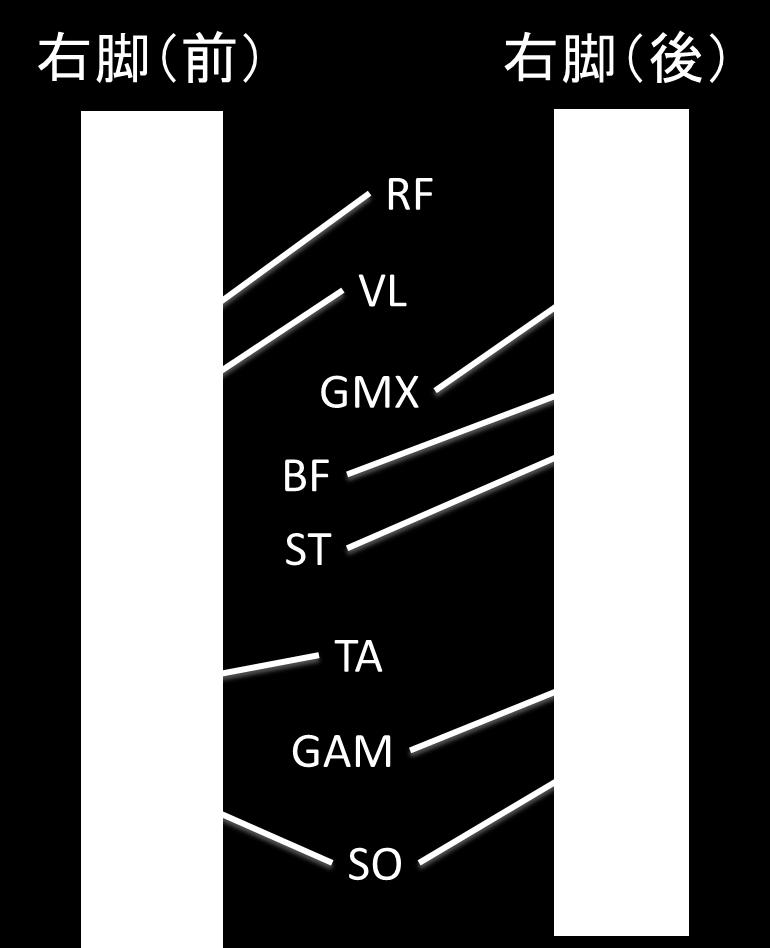
24 Right lower limb from right side view Right lower limb from back view Fig. 2-5 Target muscles(reference:information-technology Promotion Agency) Fig. 2-6 Wireless EMG probe (Reference: BTS Bioengineering Corp.) Fig.2-7 Mobile terminal 21
![2.3.4. ロータリーエンコーダー トレッドミル後方に図 2-8 のロータリーエンコーダーを設置し, 走行中の時々刻々のベル ト速度を 500 [Hz] で計測した. Fig. 2-8 Rotary encoder 2.3.5. 各計測データの同期各計測機器からのデータの同期には図 2-9のパルス発生装置を用い,10 秒ごとに自動で同期信号を入力することで計測後に同期が行えるようにした.](/docs-images/92/108796075/images/25-0.jpg "筋電図には, 同期用のプローブを1つ用意し, それに同期信号 ( 矩形波信号 ) を入力した. ロータリーエンコーダーについては, ベルト速度データと同時に同期信号 ( 矩形波信号 ) をA/D 変換して取り込んだ. モーションキャプチャシステムについては, 同期信号の発生と同時に図 2-10の赤外線 LEDに信号を送り,LEDを点灯させることで同期を行った. 22")
25 ロータリーエンコーダー トレッドミル後方に図 2-8 のロータリーエンコーダーを設置し, 走行中の時々刻々のベル ト速度を 500 [Hz] で計測した. Fig. 2-8 Rotary encoder 各計測データの同期各計測機器からのデータの同期には図 2-9のパルス発生装置を用い,10 秒ごとに自動で同期信号を入力することで計測後に同期が行えるようにした. 筋電図には, 同期用のプローブを1つ用意し, それに同期信号 ( 矩形波信号 ) を入力した. ロータリーエンコーダーについては, ベルト速度データと同時に同期信号 ( 矩形波信号 ) をA/D 変換して取り込んだ. モーションキャプチャシステムについては, 同期信号の発生と同時に図 2-10の赤外線 LEDに信号を送り,LEDを点灯させることで同期を行った. 22

 を尋ねた.")
26 Fig. 2-9 Pulse output device Fig Infrared LED 主観的運動強度走行実験中には, 各走行セットの2,3,4 分経過時に被験者に主観的運動強度 (Rating of Perceived Exertion:RPE) を尋ねた.RPEには小野寺ら(1976) が作成したBorg scale の日本語表示 ( 表 2-2) を用いた. 23
27 Table 2-2 Rating scale by Onodera et al. (1976) 2.4. データ処理 ランニングエコノミー収集したV CO 2 をV O 2 で除すことで呼吸交換比 (Respiratory Exchange Ratio:RER) を算出した.V O 2 および RER を 5 点移動平均にて平滑化し,2.5-4 分間における平均値を各セットの代表値とした. また, 式 (1) を用いて各セットのV O 2 と RER よりエネルギー消費 (Energy Expenditure:EE) を算出した (Kyröläinen ら,2001). 24
28 EE = (5000 RER ) V O (1) ここで,EE の単位は [J/kg/min],RER は無次元,V O 2 の単位は [ml/kg/min] である. 各被 験者の EE の最大値を EEpeak とし,EEpeak の 90 % 以下の EE と走速度との回帰直線を 算出し, この回帰直線の傾きを RE とした (Medbø ら,1988). なお, この回帰直線の切片 の値は, 安静時の V O 2 を 5 [ml/kg/min](medbø ら,1988),RER を 0.82( 坂牧ら,1996) として式 (1) から安静時の EE を算出し, 全被験者共通で 100 [J/kg/min] とした (Medbø ら, 1988). 本研究における RE は, 各走速度ではなく各被験者について 1 つ算出され, 値が小 さいほど経済的であることを意味する 走行実験時のパフォーマンス 各被験者の走行実験時のパフォーマンスを評価するため, 式 (2) を用いて Peak Treadmill Speed(PTS) を算出した (Santos-Concejero ら,2014). PTS = V max + T last 4 30 (2) ここで,PTS の単位は [m/min] であり,V max は完走した最大走速度 [m/min] を,T last は最後 の試技の走行時間 [min] を表す 局面分けトレッドミルのベルト速度は設定値に達するまで 20 秒ほどの時間を要するため, ベルト速度がそのセットの速度に達しており, かつ EMG が安定して計測できた 30 サイクルを解析区間とした. 得られたマーカーの 3 次元座標およびトレッドミルのベルト速度は, 残差分析法により最適遮断周波数を決定した後 (Wells と Winter,1980), 位相ずれのない 4 次のバターワース型ローパスフィルタにて平滑化した ( マーカー 3 次元座標の遮断周波数 : [Hz], 25
![トレッドミルベルト速度の遮断周波数 :20.0-40.0 [Hz]). マーカーの前後方向の座標にベルト速度の積分値を加算することで, 被験者が仮想的に前に進んでいるように変換した. 変換後のマーカー座標から, 各サイクルにおける右足の接地 (ON) および離地 (OFF) の時点を屋比久 (2015) の方法により自動検出した.](/docs-images/92/108796075/images/29-1.jpg "さらに, 左右の大転子の中点を仮想重心とし, これと右第 5 中足骨粗面との位置関係から,1 サイクル中の特徴点として支持期中点 (Mid-Stance:MST), 足部最後点 (Rear:RR), 遊脚期中点 (Mid-Swing:MSW) および足部最前点 (Front:FR) の 4 点を検出した.")
29 トレッドミルベルト速度の遮断周波数 : [Hz]). マーカーの前後方向の座標にベルト速度の積分値を加算することで, 被験者が仮想的に前に進んでいるように変換した. 変換後のマーカー座標から, 各サイクルにおける右足の接地 (ON) および離地 (OFF) の時点を屋比久 (2015) の方法により自動検出した. さらに, 左右の大転子の中点を仮想重心とし, これと右第 5 中足骨粗面との位置関係から,1 サイクル中の特徴点として支持期中点 (Mid-Stance:MST), 足部最後点 (Rear:RR), 遊脚期中点 (Mid-Swing:MSW) および足部最前点 (Front:FR) の 4 点を検出した. なお,MST は支持期において第 5 中足骨粗面が重心を後方に通過した時点,RR は第 5 中足骨粗面が重心から最も後方に位置した時点,MSW は遊脚期において第 5 中足骨粗面が重心を前方に通過した時点,FR は第 5 中足骨粗面が重心から最も前方に位置した時点とした. この 4 つの特徴点と ON および OFF を含めた 6 つの特徴点から,1 サイクルを制動局面 (Brake:BR), 推進局面 (Propulsion:PS), 離地直後局面 (After Off:AO), 前方スイング前半局面 (Forward Swing - 1st:F1), 前方スイング後半局面 (Forward Swing - 2nd: F2) および接地直前局面 (Pre On:PO) の 6 局面に分割した. 図 2-11 は, これらの 6 つの特徴点および局面を示したものである. また,ON から OFF までを支持期 (Stance:Stc), OFF から次の ON までを遊脚期 (Swing:Swg), 両足が空中に浮いている局面を空中期 (Airborne:AB) とした. Fig Six event points and phases during 1 cycle 26
, 離地距離 (Take Off Distance:%TOD), 最前部距離 (Front Distance:%FRD) および最後部距離 (Rear Distance:%RRD) のパーセンテージを算出した. また, 重心の上下動 (H1,H2,H3, H4) を算出した.")
30 ストライド特性第 5 中足骨および仮想重心とした大転子中点の位置から, ステップ長 (Step Length:SL), ステップ頻度 (Step Frequency:SF),1 サイクル時間に対する BR,PS,AO,F1,F2, PO および AB の時間のパーセンテージ (%BRT,%PST,%AOT,%F1T,%F2T,%POT, %ABT), ステップ長に対する接地距離 (Touch Down Distance:%TDD), 離地距離 (Take Off Distance:%TOD), 最前部距離 (Front Distance:%FRD) および最後部距離 (Rear Distance:%RRD) のパーセンテージを算出した. また, 重心の上下動 (H1,H2,H3, H4) を算出した. 図 2-12 は TDD,TOD,FRD および RRD の定義を, 図 2-13 は H1, H2,H3 および H4 の定義を示したものである.SL は 1 サイクル中の重心の水平移動距離の半分,SF は 1 秒間の歩数とした.%TDD,%TOD,%FRD および %RRD はそれぞれ ON, OFF,FR および RR における重心と第 5 中足骨との水平変位を SL で除して 100 をかけたものとした.H1 は重心の ON から最下点までの鉛直変位,H2 は重心の最下点から OFF までの鉛直変位,H3 は重心の OFF から最高点までの鉛直変位,H4 は重心の最高点から次のサイクルの ON までの鉛直変位とした. Fig Definition of TDD, TOD, FRD and RRD (GT: center of Great Trochanter; RM: Right fifth Metatarsal) 27
 の角度 (θ h,θ k,θ a ) を算出した. なお, この関節角度は, 矢状面に投影した角度である.")
31 Fig Definition of H1, H2, H3 and H 下肢キネマティクス頸椎点と胸骨上縁との中点, 右大転子, 右大腿骨外側上顆, 右外果, 右第 5 中足骨粗面の位置から, 下肢 3 関節 ( 股関節, 膝関節, 足関節 ) の角度 (θ h,θ k,θ a ) を算出した. なお, この関節角度は, 矢状面に投影した角度である. また, 関節角度を時間で数値微分することにより関節角速度 (ω h,ω k,ω a ) を算出した. 図 2-14 は, 下肢 3 関節の関節角度の定義を示したものである. 28
 を検出した. また, 関節角度のピーク値の差から関節の動作範囲 (Range of Motion:ROM;R h1,r h2,r h3, R h4,r k1,r k2,r k3,r k4,r a1,r a2,r a3 ) を算出した. 図 2-15 は, 検出した関節角度および関節角速度のピーク値,ROM を示したものである.")
32 Fig Definition of joint angle in hip, knee and ankle 算出した 1 サイクル中の関節角度および関節角速度から, 支持期および遊脚期の最大伸展および最大屈曲, 最大底屈および最大背屈を表すピーク値 (θ h1,θ h2,θ h3,θ k1,θ k2,θ k3, θ k4,θ a1,θ a2,ω h1,ω h2,ω h3,ω h4,ω k1,ω k2,ω k3,ω k4,ω a1,ω a2 ) を検出した. また, 関節角度のピーク値の差から関節の動作範囲 (Range of Motion:ROM;R h1,r h2,r h3, R h4,r k1,r k2,r k3,r k4,r a1,r a2,r a3 ) を算出した. 図 2-15 は, 検出した関節角度および関節角速度のピーク値,ROM を示したものである. これらの値は, 各被験者の各走速度における 30 サイクルの平均値を各セットの代表値とした. 29
33 θ h2 R h2 R h4 ω h2 ω h4 θ R h1 h1 R h3 θ h3 ω h1 Hip Hip ω h3 R k1 R k2 θ k2 R k4 θ k4 ω k2 ω k4 θ k1 R k3 θ k3 Knee ω k1 ω a2 ω k3 Knee R a1 R a2 θ a2 θ a1 R a3 Ankle ω a1 Ankle Fig Definition of local maximum and minimum in joint angle and joint angular velocity, and range of motion(arrow: ROM, dotted line: OFF) 筋活動得られた筋電図に通過帯域 15~500 [Hz] のバターワース型バンドパスフィルタをかけ, 平均電圧を引くことによってバイアスを取り除き, 全波整流した. 全波整流後の振幅値の二乗平均平方根 (Root Mean Square:RMS) を各局面について算出し, 筋活動量 (RMS 振幅 ) を評価した. また, 全波整流後の波形を遮断周波数 10 [Hz] のローパスフィルタに通し, 包絡線を算出した. 得られた RMS 振幅および包絡線は MVC における包絡線のピーク値を 100 % として正規化を行った. 30
34 走行中の包絡線ピーク値の 15 % を閾値とし, 閾値を包絡線が上回った時点を筋活動の開始 (Onset:On), 下回った時点を筋活動の終了 (Offset:Off) として (Steele と Brown, 1999) 筋活動のタイミングを評価した. これらは,ON に対するタイミングの差を 1 サイクル時間で正規化し,0 % が ON となるようにした. また,On から Off までの時間を筋の活動時間 (Duration:Drt) とし,Drt が 50 [ms] に満たないバーストは不活動とみなした (Steele と Brown,1999). なお, 各筋の包絡線の典型的なパターンから 1 サイクル中の On のタイミングおよびバーストの数を限定し, 限定数以上のバーストが検出される場合は Drt が最大のものをバーストとして検出した. 表 2-3 は, 限定した各筋の On のタイミングおよびバーストの数を示したものである. さらに, 複数筋の共通の Drt をそれらの筋の共収縮時間 (Cocontraction time:cocon) とした. 各局面ごとに Cocon を求め, 各局面時間に対するパーセンテージ (% 共収縮時間 ) を算出した. このペアは, 下肢 3 関節の伸展筋群および屈曲筋群から 1 筋ずつ選択した 1 対 1 の 9 組 (RF-GMX,RF-BF,RF-ST,RF-GAM, VL-BF,VL-ST,VL-GAM,TA-GAM,TA-SO) と, 関節毎に全ての伸展筋群対全ての屈曲筋群を選択した 3 組 (Hip:RF (GMX BF ST),Knee:(RF VL)-(BF ST GAM),Ankle: TA-(GAM SO)) の計 12 組とした. これらの値は, 各被験者の各走速度における 30 サイクルの平均値を各セットの代表値とした. 31
35 Table 2-3 Detection range of On and detection number of burst RF VL GMX BF On 1st [%] -30~0-30~0-40~0-60~-10 On 2nd [%] 20~60-10~20 Burst Number ST TA GAM SO On 1st [%] -60~-10-90~-40-40~20-30~20 On 2nd [%] -10~20-40~0 Burst Number 統計処理 Trained と Untrained の年齢, 身体特性,RE および PTS の差を検討するため, 独立 2 群の t 検定を行った. トレーニングが下肢の動作および筋活動に及ぼす影響について検討するため, 走速度を走行中の下肢の動作および筋活動に強い影響を持つ要因としてとらえ, 走速度を共変量, トレーニングの有無 (Trained,Untrained) を要因とする共分散分析 (Analysis of Covariance:ANCOVA) を行った. 図 2-16 は,ANCOVA の手順および結果の解釈を示したものである.ANCOVA を行うには,(1) 走速度が説明変数, 検定対象の変数が目的変数である回帰直線の傾きが両群で等しい ( 平行である ) こと,(2) 回帰直線の傾きが有意であることという 2 つの前提条件が存在する. したがって,ANCOVA を行う前に (1) および (2) の検定を行い, 条件を満たした変数のみに ANCOVA を行った.(1) を満たしたが (2) を満たさなかった変数にはトレーニングの有無 (Trained,Untrained) を要因とする一元配置分散分析 (One-Way Analysis of Variance:ANOVA) を行った. トレーニングが下肢の動作および筋活動に及ぼす影響についての検定の結果は, 図中の1~5のいずれかに該当する. 32
36 1 走速度の影響が両群において等しく, 走速度の大きさに関わらず群間差が有意である. 2 走速度の影響が両群において等しく, 走速度の大きさに関わらず群間差が有意ではない. 3 走速度の影響を受けず, 群間差が有意である. 4 走速度の影響を受けず, 群間差が有意ではない. 5 走速度の影響が両群で異なり, 群間差が走速度に依存する ( どの走速度で比較するかにより結果が異なる ). 33

37 Effect of running speed on the variable is: Difference between Trained and Untrained is: Mark of Significance 1 significant significant * p< significant not significant 3 not significant significant * p< not significant not significant 5 different between the groups dependent on the speed p<0.05 Fig Flowchart and interpretation of results in ANCOVA( 岡田,2000 を一部改変 ) 34
 の記号とした.")
 した上で投入した.")
38 また, 下肢の動作および筋活動に及ぼす走速度の影響を検討するため, 走速度を要因とする ANOVA を Trained,Untrained それぞれについて行った.Trained において走速度間の差が有意であった場合には T,Untrained において走速度間の差が有意であった場合には U を有意差 (p<0.05) の記号とした. さらに,RE に影響を及ぼす下肢の動作および筋活動の変数を明らかにするため,RE を目的変数,RE との単相関が有意であるバイオメカニクス的変数を説明変数とするステップワイズ重回帰分析を行った. 説明変数には,Trained および Untrained の全走速度における値を対象とし, 各被験者において走速度と対象の変数との単相関が有意であった場合には, 走速度による影響を ANCOVA と同様の手法を用いて調整 (210 [m/min] 時の値に調整 ) した上で投入した. 図 2-17 は, 調整前後の走速度とバイオメカニクス的変数との関係例を示したものである. なお, いずれの場合も危険率 5 % 未満を有意水準とした. Fig Relationship between running speed and biomechanical variable before and after adjustment 35
39 3. 結果 3.1. 年齢, 身体特性, ランニングエコノミーおよびパフォーマンス Trained と Untrained の年齢および身体特性には有意差が認められなかった. 一方,PTS は Trained が 321.6±11.5 [m/min],untrained が 232.7±29.8 [m/min] であり,Trained の方が有意に大きかった (p<0.001). また,RE はそれぞれ 3.9±0.2 [J/kg/m] および 4.5± 0.5 [J/kg/m] であり,Trained の方が有意に経済的であった (p<0.01). 図 3-1 は,RE と PTS との関係を示したものである. 両者には有意な負の相関が認められた (r=-0.73, p<0.01). 以上のことから,Trained と Untrained との間には年齢および身体特性に差はないが, 実験当日のパフォーマンスと走の経済性には差があり, パフォーマンスが高いランナーほど経済性に優れていることが示された. 一方,Trained の各被験者の RE と PTS および RE と 5000m 記録との相関は有意ではなかった ( 図 3-2). Fig. 3-1 Relationship between RE and PTS 36
40 Fig. 3-2 Relationships between RE and PTS (left), RE and 5000m record (right) for Trained 3.2. 長距離ランナーの下肢動作の特徴 ストライド特性図 3-3 は走速度の増加に伴う SL および SF の変化を示したものである.SL および SF は, 両群ともに走速度の増加に伴い有意に増加していたが, 群間差は認められなかった. このことから, 同じ速度におけるステップ長およびステップ頻度の選択にはトレーニングによる影響はないと考えられる. T U T U Fig. 3-3 Changes in SL and SF with increasing running speeds 37
41 図 3-4 および図 3-5 は走速度の増加に伴う局面時間のパーセンテージ (%BRT,%PST,%AOT,%F1T,%F2T,%POT) の変化を示したものである.%BRT および %F2T は走速度の大きさに関わらず Trained が Untrained に比べて有意に小さかった.%F1T および %POT は走速度の大きさに関わらず Trained が Untrained に比べて有意に大きかった.%PST は ANCOVA にて走速度とトレーニングの有無に交互作用が認められ, 両群ともに走速度の増加に伴い有意に減少していたが,Trained の方が減少の度合いが大きかった.%AOT は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ, Untrained のみ走速度の増加に伴い有意に増加していた. 図 3-4 の上部のスティックピクチャから分かるように,BR では着地動作,PS ではキック動作,AO ではキック後の脚のフォロースルー動作,F1 では大腿の振出動作,F2 では下腿の振出動作,PO では大腿および下腿の振り戻し動作が行われている. 以上のことから,Trained では, 走速度の大きさに関わらず着地時のブレーキおよび下腿の振出の時間が短く, 大腿の前方スイングおよび大腿, 下腿の振り戻しの時間が長いといえる. また, 走速度の増加に伴うキック動作時間の減少の度合いが Untrained よりも大きい傾向にあった. 一方,Untrained では, 走速度の増加に伴いフォロースルー時間が長くなる傾向にあった. 38

42 BR PS AO F1 F2 PO T U T U * T U U T T * * * U Fig. 3-4 Changes in percent phase time during 1 cycle with increasing running speeds (red: Trained, blue: Untrained) 39
43 * T U T U U * T U * T U * T Fig. 3-5 Changes in percent phase time with increasing running speeds 図 3-6 は, 走速度の増加に伴うステップ長の内訳 (%TDD,%TOD,%FRD,%RRD) の変化を示したものである.%TDD は, 走速度の大きさに関わらず Trained が Untrained に比べて有意に小さかった.%TOD および %FRD は,ANCOVA にて交互作用が認められ, 両群ともに走速度の増加に伴い有意に減少していたが,Untrained の方が減少の度合いが大きかった.%RRD は, 両群ともに走速度の増加に伴い有意に減少していたが, 群間差は有意ではなかった. 以上のことから,Trained では, 走速度の大きさに関わらずブレーキの距離が小さいことが明らかになった. また, 走速度の増加に伴い離地時および最後点時の足部が仮想重心と 40
44 した大転子中点に近づくが,Untrained に比べてこれらの変化が小さいことが明らかにな った. * T U T U T U T U Fig. 3-6 Changes in percent components of step length with increasing running speeds 図 3-7 は, 走速度の増加に伴う仮想重心とした大転子中点の上下動 (H1,H2,H3,H4) の変化を示したものである.H1 は, 走速度の大きさに関わらず Trained が Untrained に比べて有意に小さかった.H3 および H4 は, 走速度の大きさに関わらず Trained が Untrained に比べて有意に大きかった.H2 は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ,Trained のみ走速度の増加に伴い有意に減少していた. 以上のことから,Trained では走速度の大きさに関わらず支持期における重心の下降量が小さく, 遊脚期の上昇量および下降量が大きいことが明らかになった. また, 走速度の増加に伴い支持期の上昇量が Untrained よりも小さくなる傾向があった. 41
45 * T U T * T * Fig. 3-7 Changes in vertical displacements of COM with increasing running speeds 下肢の関節角度図 3-8 は, 走速度の増加に伴う 1 サイクル中の下肢 3 関節の関節角度 (θ h,θ k,θ a ) の時系列変化を示したものである. まず, 関節角度について結果を述べる. 股関節では, 走速度の大きさに関わらずθ h1 およびθ h3 は Trained が Untrained に比べて有意に大きかった. 膝関節では, 走速度の大きさに関わらずθ k1 は Trained が Untrained に比べて有意に小さく,θ k3 は Trained が Untrained に比べて有意に大きかった. この内,θ k1 には走速度の影響がみられなかった. 足関節では, 走速度の大きさに関わらずθ a1 およびθ a2 は Trained が Untrained に比べて有意に大きかった. この内,θ a1 には走速度の影響がみられなかった. 図 3-9 は走速度の増加に伴う下肢 3 関節の関節角度 (θ h1,θ h3,θ k1,θ k3,θ a1,θ a2 ) の変化を示したものである. 以上のことから, 股関節について,Trained では, 走速度の大きさに関わらず, 支持期および遊脚期の最大屈曲角度が大きいことが明らかになった. また, 膝関節について,Trained 42
46 では, 走速度の大きさに関わらず, 支持期の最大屈曲角度が大きく, 遊脚期の最大屈曲角度が小さいことが明らかになった. また, 足関節について,Trained では, 走速度の大きさに関わらず, 支持期の最大背屈角度が大きく, 支持期の最大底屈角度が大きいことが明らかになった. 次に,ROM について結果を述べる. 股関節では, 走速度の大きさに関わらずR h1 は Trained が Untrained に比べて有意に小さく,R h4 は Trained が Untrained に比べて有意に大きかった. この内,R h1 には走速度の影響がみられなかった.R h2 は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ,Trained のみ走速度の増加に伴い有意に増加していた.R h3 は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ, 両群ともに走速度の増加に伴い有意に増加していたが,Trained の方が増加の度合いが小さかった. 膝関節では, 走速度の大きさに関わらずR k2 は Trained が Untrained に比べて有意に小さく, R k4 は Trained が Untrained に比べて有意に大きかった. 足関節では, 走速度の大きさに関わらずR a3 は Trained が Untrained に比べて有意に小さかった. 図 3-10 は走速度の増加に伴う下肢 3 関節の ROM(R h1,r h2,r h3,r h4,r k2,r k4,r a3 ) の変化を示したものである. 以上のことから, 股関節について,Trained では走速度の大きさに関わらず支持期の屈曲動作が小さく, 遊脚期の伸展動作が大きいことが明らかになった. また, 走速度の増加に伴い支持期の伸展動作が Untrained よりも大きくなる傾向, 遊脚期の屈曲動作が Untrained よりも小さくなる傾向があった. また, 膝関節について,Trained では走速度の大きさに関わらず支持期の伸展動作が小さく, 遊脚期の伸展動作が大きいことが明らかになった. また, 足関節について,Trained では走速度の大きさに関わらず遊脚期の背屈動作が小さいことが明らかになった. また,ANCOVA にて群間差もしくは交互作用は認められてはいないが, 接地後の重心の下降を示すR h1,r k1,r a1 を比較すると, 両群ともにR h1 よりもR k1 およびR a1 の方が大きいことから, 重心の下降には膝関節および足関節が関わると考えられる. 43
47 R h1 * θ h1 * U Hip R h2 T θ h2 T U R h3 T U R h4 * T θ h3 * T U R k2 * R k3 T U R k4 * T U θ k1 * Knee θ k3 * T U θ a2 * T θ a1 * R a3 * Ankl Fig. 3-8 Changes in lower limb joint angles during 1 cycle with increasing running speeds (red dotted line: OFF of Trained, blue dotted line: OFF of Untrained) 44
48 * U * T U * * T U * * T Fig. 3-9 Changes in joint angles with increasing running speeds 45
49 * T U T * T * * T U * Fig Changes in range of motions (ROM) with increasing running speeds 46
50 下肢の関節角速度図 3-11 は, 走速度の増加に伴う 1 サイクル中の下肢 3 関節の関節角速度 (ω h,ω k,ω a ) の時系列変化を示したものである. 股関節では, 走速度の大きさに関わらず,ω h2 は Trained が Untrained に比べて有意に小さく,ω h3 は Trained が Untrained に比べて有意に大きかった.ω h4 は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ,Trained のみ走速度の増加に伴い有意に増加していた. 膝関節では, 走速度の大きさに関わらず,ω k1 は Trained が Untrained に比べて有意に大きかった.ω k2 は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ, 両群ともに走速度の増加に伴い有意に増加していたが,Trained の方が増加の度合いが大きかった.ω k3 は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ, 両群ともに走速度の増加に伴い有意に減少していたが,Trained の方がより減少の度合いが大きかった. 足関節では,ω a2 は走速度の大きさに関わらず Trained が Untrained に比べて有意に大きかった. 図 3-12 は, 走速度の増加に伴う下肢 3 関節の関節角速度 (ω h2, ω h3,ω h4,ω k1,ω k2,ω k3,ω a2 ) の変化を示したものである. 以上のことから, 股関節について,Trained では走速度の大きさに関わらず, 支持期の最大伸展および遊脚期の最大屈曲角速度が小さいことが明らかになった. また, 走速度の増加に伴い遊脚期の最大伸展角速度が Untrained よりも大きくなる傾向があった. また, 膝関節について,Trained では走速度の大きさに関わらず, 支持期の最大屈曲角速度が小さいことが明らかになった. また, 走速度の増加に伴い支持期の最大伸展および遊脚期の最大屈曲角速度が Untrained よりも大きくなる傾向があった. また, 足関節について,Trained では走速度の大きさに関わらず, 支持期の最大底屈角速度が大きいことが明らかになった. 47
51 ω h2 * T U ω h4 T ω h3 * T U ω k4 T U ω k2 T U ω k1 * T U ω k3 T U ω a2 * T U Fig Changes in lower limb joint angular velocities during 1 cycle with increasing running speeds (red dotted line: OFF of Trained, blue dotted line: OFF of Untrained) 48
52 * T U * T U T * T U T U T U * T U Fig Changes in joint angular velocities with increasing running speeds 3.3. 長距離ランナーの下肢筋活動の特徴 下肢筋活動のパターン 図 3-13 は, 走速度の増加に伴う各筋の包絡線の変化を示したものである. 各筋のバース 49
53 トのタイミングおよび図の上部に示したスティックピクチャから,RF は接地直後および遊脚期序盤に,VL,GAM,SO は接地直後に,GMX は接地とほぼ同時に,BF および ST は支持期中盤および遊脚期終盤に,TA は支持期前半および遊脚期全体に渡って活動が続き接地直前に大きなバーストがあることが確認できた. 50
54 Fig Changes in envelope of each muscle with increasing running speeds (red dotted line: OFF of Trained, blue dotted line: OFF of Untrained) 51
55 下肢筋活動量図 3-14 は, 走速度の増加に伴う各筋の局面ごとの筋活動量 (RMS 振幅 ) の変化を示したものである.BF@PO,TA@BR,TA@F1 および TA@F2 は, 走速度の大きさに関わらず Trained が Untrained に比べて有意に小さかった. この内,TA@F1 には走速度の影響がみられなかった.GAM@BR,SO@BR,GAM@PO,SO@PO および BF@PS は, 走速度の大きさに関わらず Trained が Untrained に比べて有意に大きかった. 図 3-15 は走速度の増加に伴う GAM@BR,GAM@PO,SO@BR および SO@PO の変化を, 図 3-16 は走速度の増加に伴う BF@PS,BF@PO,TA@BR,TA@F1 および TA@F2 の変化を示したものである. 以上のことから,Trained では, 走速度の大きさに関わらず, 接地直前局面の大腿二頭筋, 制動局面, 前方スイング前半局面および前方スイング後半局面の前脛骨筋の活動量が小さく, 制動局面および接地直前局面の腓腹筋, 制動局面および接地直前局面のヒラメ筋, 推進局面の大腿二頭筋の活動量が大きかった. なお,GMX@F1,SO@AO,SO@F1 および SO@F2 は群間差が認められたが, 図 3-4 からランニングサイクルにおいて AO が約 %, F1 が約 %,F2 が約 % であり, 図 3-13 の包絡線にこれをあてはめるとバーストがない局面であることが確認できるため, 言及しなかった. 52
56 T * * T * T * T U * * * T * * T T * T * T * T * Fig Changes in RMS amplitude of each lower limb muscle with increasing running speeds (red: Trained, blue: Untrained) 53
57 * T * T * T * Fig Changes in RMS amplitude of GAM and SO with increasing running speeds 54
58 * * T * * * Fig Changes in RMS amplitude of BF and TA with increasing running speeds 下肢筋活動のタイミングおよび活動時間図 3-17 は, 走速度の増加に伴う各筋の筋活動開始時点 (On), 筋活動終了時点 (Off) および筋活動時間 (Drt) の変化を示したものである. 図中の楕円囲みは On,Off に, 四角囲みは Drt に有意差か交互作用が認められたことを示している. また,RF,BF,ST および TA は,1 サイクル中のバーストを 2 つ検出しているため, これら 2 つの合計値を DrtS と表記した.RF_Off1,GMX_Off,VL_On,ST_Off1,TA_On1 および GAM_Off は, 走速 55
59 度の大きさに関わらず Trained が Untrained に比べて有意に早かった. この内,RF_Off1, VL_On,ST_Off1,TA_On1 および GAM_Off には走速度の影響がみられなかった.TA_Drt2 は, 走速度の影響を受けずに Trained が Untrained に比べて有意に大きかった.RF_Drt1, RF_DrtS,GMX_Drt および SO_Drt は, 走速度の大きさに関わらず Trained が Untrained に比べて有意に小さかった. この内,RF_Drt1,GMX_Drt および SO_Drt には走速度の影響がみられなかった.SO_On は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ,Trained のみ走速度の増加に伴い早まっていた. 図 3-18 は, 走速度の増加に伴う RF_Off1,VL_On,GMX_Off,ST_Off1,TA_On1,GAM_Off および SO_On の変化を, 図 3-19 は, 走速度の増加に伴う RF_Drt1,RF_DrtS,GMX_Drt,TA_Drt2 および SO_Drt の変化を示したものである. したがって, 筋活動のタイミングについて Trained では, 走速度の大きさに関わらず, 大腿直筋の支持期の活動終了, 外側広筋の活動開始, 大殿筋の活動終了, 半腱様筋の支持期の活動終了, 前脛骨筋の遊脚期の活動開始および腓腹筋の活動終了が早かった. 筋の活動時間について Trained では, 支持期および 1 サイクル全体の大腿直筋, 大殿筋およびヒラメ筋の活動時間が短く, 接地前後の前脛骨筋の活動時間が長かった. また, 走速度の増加に伴いヒラメ筋の活動開始が Untrained よりも早くなる傾向であった. 56


60 * * T * T * * * T * * * T * T T * Fig Changes in onset, offset and duration of each muscle with increasing running speeds (red: Trained, blue: Untrained, 0 %:ON) 57
61 * * * T * * * T Fig Changes in onset and offset of each muscle with increasing running speeds 58
62 * * T * * * Fig Changes in duration of each muscle with increasing running speeds 下肢筋の共収縮時間図 3-20 は, 走速度の増加に伴う各ペアの % 共収縮時間 (Cocon) の変化を示したものである. なお,Hip は RF (GMX BF ST) の組み合わせ,Knee は (RF VL)-(BF ST GAM) の組み合わせ,Ankle は TA-(GAM SO) の組み合わせによる % 共収縮時間を示している. RF-BF@BR,RF-ST@BR,VL-ST@BR,RF-BF@AO,RF-GMX@F2,RF-BF@F2,RF-ST@F2, RF-GAM@F2,Hip@F2,Ankle@F2,RF-BF@PO,RF-ST@PO,VL-BF@PO,TA-GAM@PO 59
63 および は, 走速度の大きさに関わらず Trained が Untrained に比べて有意に小さかった. および には, および は, 走速度の大きさに関わらず Trained が Untrained に比べて有意に大きかった. および には, は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ,Trained は,ANCOVA にて走速度とトレーニングの有無に交互作用が認められ,Untrained のみ走速度の増加に伴い有意に増加していた. 図 3-21 は走速度の増加に伴う制動局面の各ペアの % 共収縮時間 (RF-BF@BR,RF-ST@BR,RF-GAM@BR, VL-BF@BR,VL-ST@BR,TA-GAM@BR,TA-SO@BR,Ankle@BR) の変化を, 図 3-22 は走速度の増加に伴う推進局面, 離地直後局面および前方スイング前半局面の各ペアの % 共収縮時間 (RF-BF@PS,RF-GAM@PS,RF-BF@AO,TA-SO@F1) の変化を, 図 3-23 は走速度の増加に伴う前方スイング後半局面の各ペアの % 共収縮時間 (RF-GMX@F2, RF-BF@F2,RF-ST@F2,RF-GAM@F2,Hip@F2,Ankle@F2) の変化を, 図 3-24 は走速度の増加に伴う接地直前局面の各ペアの % 共収縮時間 (RF-BF@PO,RF-ST@PO, VL-BF@PO,TA-GAM@PO,RF-GAM@PO) の変化を示したものである. したがって, 制動局面について Trained では, 走速度の大きさに関わらず, 外側広筋と大腿二頭筋および大腿直筋と腓腹筋とのペアを除いた膝関節まわりの % 共収縮時間が短く, 足関節まわりの % 共収縮時間が長かった. 推進局面について Trained では, 走速度の増加に伴い膝関節まわりの % 共収縮時間が増加する傾向であった. 離地直後局面の大腿直筋と大腿二頭筋および前方スイング前半局面の前脛骨筋とヒラメ筋の % 共収縮時間については, ANCOVA にて群間差および交互作用が認められているが, 両群の平均値が 10 % 以下と小さかった. 前方スイング後半局面について Trained では, 走速度の大きさに関わらず下肢 3 60
64 関節まわりの % 共収縮時間が短かった. 接地直前局面について Trained では, 走速度の大き さに関わらず下肢 3 関節まわりの % 共収縮時間が短かった. 61
65 * * T T * * * T * T T * * T * * * T * T * T * * * U * * * Fig Changes in percent cocontraction time of each pair with increasing running speeds 62
66 * T * T T * T * * * * Fig Changes in percent cocontraction time of each pair during brake phase with increasing running speeds 63
67 T T * U Fig Changes in percent cocontraction time of each pair during propulsion, after off and forward swing 1st phase with increasing running speeds 64
68 * * * * * * Fig Changes in percent cocontraction time of each pair during forward swing 2nd phase with increasing running speeds 65
69 * T * * T * * Fig Changes in percent cocontraction time of each pair during pre on phase with increasing running speeds 3.4. 下肢の動作および筋活動とランニングエコノミーとの関係 RE に影響を及ぼす下肢の動作および筋活動の変数を明らかにするため,RE を目的変数, RE との単相関が有意である下肢動作を示す変数および下肢筋活動を示す変数を説明変数とするステップワイズ重回帰分析を行った. さらに, 下肢動作が RE に及ぼす影響, 下肢筋活動が RE に及ぼす影響を明らかにするため,RE を目的変数,RE との単相関が有意である下肢動作を示す変数および下肢筋活動を示す変数それぞれのみを説明変数とするステッ 66
70 プワイズ重回帰分析も行った. 表 3-1 は,RE との単相関が有意であった下肢の動作および筋活動を示す変数を示したものである. 筋活動量 (RMS 振幅 ) および % 共収縮時間 (Cocon) については, 各筋のバーストがある局面を確認し, バーストがない局面の変数は対象から除いた. また, 筋活動のタイミング (On および Off) は, 筋の活動時間 (Drt) を説明する要因であるため対象から除いた.RE との単相関が有意であった下肢動作を示す変数は 17 個, 下肢筋活動を示す変数は 16 個であった. なお, 筋活動を示す変数については, 計測時のアーチファクトが大きいことなどが原因で解析できなかったケースがあった. このため, 重回帰分析を行う上で必要なサンプル数の条件を満たすために, 有効サンプル数が全体の 75 % 以下の 5 つの変数 (GAM@BR,GAM@PO,BF_Drt2,TA_Drt1,VLGAM@BR) は投入変数から除いた. Table 3-1 Kinematic and EMG variables that show the significant correlation with RE Performance Descriptors Kinematics RMS Amplitude Duration of muscle activity SL,%BRT,%PST,%POT,%ABT,%TOD,%RRD,H4 θ k2,θ a1,ω h1,ω h3,ω k3,r h1,r h2,r h3,r k2 VL@BR,TA@BR,SO@BR,BF@F2,ST@F2,SO@PO ST_DrtS,SO_Drt Cocontraction time RF-GMX@BR,RF-ST@BR,VL-BF@BR,VL-ST@BR, RF-GMX@PO,RF-ST@PO,VL-ST@PO,Hip@PO 表 3-2 は,RE を目的変数, 表 3-1 に示された下肢の動作および筋活動を示す変数を説明変数とするステップワイズ重回帰分析の結果を示したものである. 重回帰分析の結果,RE の変動の 84.8 % を下肢の動作および筋活動の 6 つの変数により説明することができた. また,VL-ST@BR,RF-ST@BR,RF-GMX@BR,BF@F2,SL,ST_DrtS の順に標準偏回帰 67
71 係数が大きかった. 標準偏回帰係数が大きいほど RE および ST_DrtS および SL は大きいほど経済的であることが明らかになった. また, 図 3-25 はこの下肢の動作および筋活動を示す変数を説明変数とする重回帰分析による標準化残差と RE の予測値との関係を示したものである. 相関係数がほぼ 0 であることから, 重回帰分析の結果は良好であるといえる. Table 3-2 Result of multiple regression analysis with RE as objective variable, kinematic and muscle activity parameters as explanatory variables R 2 = 84.8 [%] Parameter Partial regression coefficient Standard partial regression coefficient VIF VL-ST@BR *** RF-ST@BR *** RF-GMX@BR *** BF@F2 *** SL *** ST_DrtS * *:p<0.05 **:p<0.01 ***:p<
72 Fig Relationships between standardized residual and expectancy of RE by multiple regression analysis with kinematic and muscle activity parameters as explanatory variables 表 3-3 は,RE を目的変数, 表 3-1 に示された下肢動作を示す変数のみを説明変数とするステップワイズ重回帰分析の結果を示したものである. 重回帰分析の結果,RE の変動の 38.1 % を下肢動作の 5 つの変数により説明することができた. また,%POT,SL,H4,R h3, ω k3 の順に標準偏回帰係数が大きかった. 標準偏回帰係数が大きいほど RE への影響が大きく,%POT,SL およびω k3 は大きいほど,H4 およびR h3 は小さいほど経済的であることが明らかになった. また, 図 3-26 はこの下肢動作を示す変数を説明変数とする重回帰分析による標準化残差と RE の予測値との関係を示したものである. 相関係数がほぼ 0 であることから, 重回帰分析の結果は良好であるといえる. 69
73 Table 3-3 Result of multiple regression analysis with RE as objective variable, kinematic parameters as explanatory variables R 2 = 38.1 [%] Parameter Partial regression coefficient Standard partial regression coefficient VIF %POT *** SL *** H4 * R h3 *** ω k3 * *:p<0.05 **:p<0.01 ***:p<0.001 Fig Relationships between standardized residual and expectancy of RE by multiple regression analysis with kinematic parameters as explanatory variables 表 3-4 は,RE を目的変数, 表 3-1 に示された下肢筋活動を示す変数のみを説明変数とす 70
74 るステップワイズ重回帰分析の結果を示したものである. 重回帰分析の結果,RE の変動の 81.1 % を下肢筋活動の 5 つの変数により説明することができた. また,VL-ST@BR, RF-ST@BR,BF@F2,RF-GMX@BR,SO_Drt の順に標準偏回帰係数が大きかった. 標準偏回帰係数が大きいほど RE への影響が大きく,VL-ST@BR,RF-GMX@BR および SO_Drt は小さいほど,RF-ST@BR および BF@F2 は大きいほど経済的であることが明らかになった. また, 図 3-27 はこの下肢筋活動を示す変数を説明変数とする重回帰分析による標準化残差と RE の予測値との関係を示したものである. 相関係数がほぼ 0 であることから, 重回帰分析の結果は良好であるといえる. 図 3-28 は, これらの 3 つの重回帰分析から得られたモデルにおける説明変数の貢献を示したものである. 下肢の動作および筋活動を説明変数とするモデルでは, 下肢動作を示す変数が SL のみであったのに対し, 下肢筋活動を示す変数は 5 つで決定係数は 84.8 % と, 下肢動作のみにて重回帰分析を行った Williams と Cavanagh(1987) の 54 % よりも高かった. また, 下肢動作を示す変数を説明変数とするモデルの決定係数は 38.1 %, 下肢筋活動を示す変数を説明変数とするモデルの決定係数は 81.1 % であった. 以上のことから,RE への影響は, 下肢動作よりも下肢筋活動の方が大きいといえる. また, モデルに残った説明変数から, 特に制動局面における股関節および膝関節まわりの筋の % 共収縮時間が重要であることが示唆された. 71
75 Table 3-4 Result of multiple regression analysis with RE as objective variable, muscle activity parameters as explanatory variables R 2 = 81.1 [%] Parameter Partial regression coefficient Standard partial regression coefficient VIF VL-ST@BR *** RF-ST@BR *** BF@F2 *** RF-GMX@BR * SO_Drt * *:p<0.05 **:p<0.01 ***:p<0.001 Fig Relationships between standardized residual and expectancy of RE by multiple regression analysis with muscle activity parameters as explanatory variables 72
76 Fig Contribution of each explanatory variables to explained variance in RE of each multiple regression analysis model 73
77 4. 考察 4.1. 得られたランニングエコノミーの妥当性 Trained と Untrained との間には, 年齢および身体特性に差はないが実験当日のパフォーマンスおよび経済性には差があり, パフォーマンスが高いランナーほど経済性に優れていることが示された ( 図 3-1). 本研究では, ランニングエコノミー (RE) の算出方法として, 走速度とエネルギー消費との回帰直線を用いて高強度におけるエネルギー消費を推定する方法 (Medbø ら,1988) と, 酸素摂取量 (V O 2 ) および呼吸交換比 (RER) を用いてエネルギー基質を考慮する方法 (Fletcher ら,2009) とを組み合わせた手法を用いた. 一般的にランニングエコノミーは, ある一定速度における酸素摂取量として評価されることが多い (Conley と Krahenbuh, 1980;Heise ら,1996;Heise と Martin,1998;Heise ら,2008;Moore ら,2013; Santos-Concejero ら,2014;Spurrs ら,2003;Weston ら,2000;Williams と Cavanagh, 1987). しかし, この手法では無酸素性エネルギーを定量できないため, アスリートのレースペースのような高い走速度における走動作とランニングエコノミーとの関係を評価することができない. さらに, 酸素摂取量のみから消費エネルギーを算出した場合, 生み出されたエネルギーが糖由来であるのか脂質由来であるのかというエネルギー基質によるエネルギー需要量の変化を考慮できないため, 実際に消費されているエネルギー量とは差が大きくなることが報告されている (Fletcher ら,2009). したがって, 簡便な方法であるがゆえに普及しているが, エネルギー消費を定量するためには適切とは言い難い手法であろう. Trained が Untrained よりも有意に経済的であり,RE とパフォーマンスには有意な相関が認められ ( 図 3-1) 先行研究の結果を支持したことから (Conley と Krahenbuhl,1980; Weston ら,2000;Williams と Cavanagh,1987), 本研究で得られたランニングエコノミーおよびその算出方法は妥当であったと考えられる. 一方,Trained のみを対象とした場合のランニングエコノミーと実験当日のパフォーマン 74
78 ス (PTS) との関係およびランニングエコノミーと 5000m 記録との関係は有意ではなく, ランニングエコノミーが狭い範囲の競技レベルを対象とした場合のパフォーマンスと有意な相関関係にあるという先行研究の結果とは一致しなかった (Conley と Krahenbuhl, 1980). この主な原因としては, 走行中のエネルギー需要量と運動強度との関係が直線的でなく, エネルギー需要量が走速度の 1.05 乗に比例する可能性があることが挙げられる (Hill と Vingren,2011). 丹治ら (2015) は, ランニングエコノミーを算出する際に呼吸交換比だけでなく血中乳酸値も考慮し, 高強度走行におけるランニングエコノミーを算出している. この結果, アスリートのみの狭い競技レベルにおけるパフォーマンスとランニングエコノミーとの有意な相関が認められ, エネルギー需要量が走速度の 1.05 乗に比例していたことを報告している. また, 同様の手法にてランニングエコノミーを算出した丹治 (2014) の研究において, 被験者の 5000m シーズンベストが 15'16"7±31"8 と本研究よりも高いパフォーマンスを持つにもかかわらず,270 [m/min] におけるランニングエコノミーが 4.4± 0.2 [J/kg/m] と本研究よりも悪かったことから, 本研究のランニングエコノミーの算出方法は高い走速度における無酸素性エネルギー量を過小評価している可能性がある. そのため, Trained のみにおけるランニングエコノミーとパフォーマンスとの有意な相関関係が認められなかったと考えられる. しかしながら, エネルギー需要量と走速度との関係が 1.05 乗であるという報告に対して, 伝統的には直線関係であると考えられており (Hill と Vingren, 2011), 両者の関係については決着がついていない. また, 丹治 (2014) および丹治ら (2015) の手法では血中乳酸値を用いるため, 実験時に被験者から採血する必要があり, 侵襲的である. したがって, 現状では高強度走行中のランニングエコノミーを適切に評価するためのスタンダードな手法が確立されているとは言えず, さらなる研究が求められるであろう. これ以外の原因としては, 実験当日と 5000m シーズンベストを記録した日の日間変動が挙げられる. パフォーマンスの指標として用いた 5000m 記録は当然ながら実験当日とは別日であるため, 心理的, 生理学的, 環境的な違いが生まれ, ランニングエコノミーと 5000m 75
79 記録との有意な相関が得られなかったと考えられる. また, 本研究では実験当日のパフォーマンスを算出しているが,Trained に関しては実験時の安全性と計測機器の限界を考慮し 330 [m/min] よりも高い強度の試技は行わなかったため,330 [m/min] を完走しかつ余裕がみられた被験者の実験当日のパフォーマンスを評価しきれていない. このことも, ランニングエコノミーと実験当日のパフォーマンスとの有意な相関が得られなかった理由の一つと考えられる. なお, 本研究の被験者について,Trained および Untrained 全体を対象にした場合には, 先述したようにランニングエコノミーとパフォーマンスとの有意な相関が認められている ( 図 3-1) ため, 本研究の結果の妥当性は十分に保たれていると考えられる 長距離ランナーの下肢の動作および筋活動の特徴 1 サイクルを 6 つに分けた局面では, 制動局面 (BR) では着地動作, 推進局面 (PS) ではキック動作, 離地直後局面 (AO) ではフォロースルー動作, 前方スイング前半局面 (F1) では大腿の振出動作, 前方スイング後半局面 (F2) では下腿の振出動作, 接地直前局面 (PO) では大腿および下腿の振り戻し動作が行われていることが示された ( 図 3-4). この節では, Trained と Untrained との間に違いがみられた下肢筋活動を示す変数について, これらの動作ごとに言及していく. ただし, 離地直後局面および前方スイング前半局面については, 大きなバーストがない筋活動量 (GMX@F1,SO@AO,SO@F1,SO@F2; 図 3-14), 平均値が 10 % 以下と小さい % 共収縮時間 (RF-BF@AO,TA-SO@F1; 図 3-22) を除いて Trained と Untrained との間に違いがみられなかったため, 言及しない 着地動作 Trained では,Untrained よりも仮想重心とした大転子中点の下降量 (H1) が有意に小 さかった ( 図 3-7). 着地動作に関わる筋活動を示す変数では, 膝関節筋群の筋活動のタイ 76
80 ミング (VL_On) および % 共収縮時間 (RF-BF@BR,RF-ST@BR,VL-BF@BR,VL-ST@BR, RF-GAM@BR,RF-BF@PO,RF-ST@PO,VL-BF@PO,RF-GAM@PO) に有意な群間差もしくは交互作用が示された ( 図 3-18, 図 3-21, 図 3-24). また, 足関節筋群の筋活動量 (TA@BR,GAM@BR,SO@BR,GAM@PO,SO@PO), 筋活動のタイミング (SO_On), 筋の活動時間 (TA_Drt2,SO_Drt) および % 共収縮時間 (TA-GAM@BR,TA-SO@BR, Ankle@BR,TA-GAM@PO) に有意な群間差もしくは交互作用が示された ( 図 3-15, 図 3-16, 図 3-18, 図 3-19, 図 3-21, 図 3-24). 着地動作時の屈曲および背屈を表す下肢 3 関節の動作範囲 (R h1,r k1,r a1 ) を比較すると,R k1 およびR a1 が大きい ( 図 3-8) ことから, 膝関節および足関節角度の変化が重心の下降の主要因であると考えられる. 着地動作時の下肢 3 関節はエキセントリックな活動であるため, 股関節および膝関節に貢献する % 共収縮時間 (RF-BF@BR,RF-ST@BR,RF-BF@PO,RF-ST@PO) は, 膝関節への貢献が股関節よりも大きいとみなした. また, 接地直前局面では, 主に大腿および下腿の振り戻し動作が行われるが, 着地動作の準備を行う局面でもあるため, 制動局面に大きなバーストがみられる大腿直筋, 外側広筋, 腓腹筋およびヒラメ筋を含む変数 (RF-BF@PO,RF-ST@PO, VL-BF@PO,RF-GAM@PO,GAM@PO,SO@PO,TA-GAM@PO) は, 着地動作に関わるとみなした. Trained では, 膝関節まわりの % 共収縮時間 (RF-BF@BR,RF-ST@BR,VL-ST@BR, RF-BF@PO,RF-ST@PO,VL-BF@PO,RF-GAM@PO) が小さく ( 図 3-21, 図 3-24), 足関節底屈筋群の筋活動量 (GAM@BR,SO@BR,GAM@PO,SO@PO) および足関節まわりの % 共収縮時間 (TA-GAM@BR,TA-SO@BR,Ankle@BR) が大きかった ( 図 3-15, 図 3-21). したがって,Trained は, 膝関節を短い共収縮によって固定し, 接地前後の足関節の底屈筋群を大きく活動させ, かつ足関節を長い共収縮によって固定し, 重心の下降を防ぐことで走の有効性 ( 榎本ら,1999) を高めていると考えられる.Kyröläinen ら (1999) は, 高い走速度における膝関節および足関節の共収縮の重要性を報告しているが, 本研究 77
81 の結果から同じ走速度においてはトレーニングの有無により関節の % 共収縮時間が異なることが明らかになった. 一方,RF-GAM@BR は制動局面におけるその他の膝関節まわりの % 共収縮時間 (RF-BF@BR,RF-ST@BR,VL-ST@BR) とは異なり,Trained では有意に大きかった ( 図 3-21).RF-GAM@BR は, その他のペアと異なり唯一下肢 3 関節全てに跨るペアであるため,Heise ら (2008) が述べているように近位から遠位へと力学的エネルギーを伝達するためには長い時間が必要である可能性が考えられる. さらに,VL-BF@BR は, 制動局面におけるその他の膝関節まわりの % 共収縮時間 (RF-BF@BR,RF-ST@BR,VL-ST@BR) とは異なり,ANCOVA にて走速度とトレーニングの有無とに交互作用が認められ,Trained のみにて走速度の増加に伴い有意に増加していた ( 図 3-21). 脚の近い場所に位置しているその他の膝関節まわりの % 共収縮時間 (RF-BF@BR,RF-ST@BR,VL-ST@BR) との違いを明確にすることはできないが,RF が二関節筋であるのに対して VL が単関節筋であること,BF が股関節の外旋筋であるのに対して ST が股関節の内旋筋であることが原因として考えられる. また, 両群における走速度の増加に伴うその他の膝関節まわりの % 共収縮時間 (RF-BF@BR,RF-ST@BR, VL-ST@BR) の変化は,VL-BF@BR のそれと類似しているため, 制動局面の膝関節まわりの % 共収縮時間は低い走速度においては短くすることで余計なエネルギー消費を抑え, 高い走速度においては長くすることで走速度の増加に伴う着地衝撃の増加に対して重心の下降を効果的に防いでいる可能性が考えられる. また,TA-GAM@PO はその他の足関節まわりの % 共収縮時間 (TA-GAM@BR,TA-SO@BR, Ankle@BR) とは異なり,Trained では有意に小さかった ( 図 3-24).TA-GAM@PO は接地直前局面の % 共収縮時間, その他の足関節まわりの % 共収縮時間 (TA-GAM@BR, TA-SO@BR,Ankle@BR) は制動局面の % 共収縮時間であるため, 接地後の体重のサポートには長い共収縮によって足関節を固定する必要があるが, 準備段階では体重のサポート 78
82 が不要であるため短い共収縮であったと考えられる. ランニングのような身体運動では筋活動によってエネルギーが消費されるが, 接地時の体重の受け止め時には腱に弾性エネルギーが蓄えられ. その直後に再利用されることでエネルギー消費が抑えられると言われている.Komi ら (1997) はランニングのような跳躍動作において着地時の筋のエキセントリックな活動によって貯蔵した弾性エネルギーを再利用するためには, エキセントリックな活動の局面から踏切時のコンセントリックな活動の局面までの切り替えの時間が短いことが重要であると報告した. このような筋の振る舞いは, 伸張短縮サイクル (Stretch-Shortening Cycle:SSC) と呼ばれる. ヒラメ筋について, Trained では制動局面の筋活動量 が大きく筋の活動時間 (SO_Drt) が短かった ( 図 3-15, 図 3-19). したがって,Trained の方が有意に経済的であったことを考慮すると, 制動局面においてエキセントリックに活動して弾性エネルギーを貯蔵し, 推進局面において素早くコンセントリックに切り替えることで弾性エネルギーを解放し (Komi ら,1997), 経済的に推進している可能性が示唆される. 足関節背屈筋群である前脛骨筋について,Trained では制動局面の筋活動量 (TA@BR) が小さく ( 図 3-16), 支持期の活動時間 (TA_Drt2) が大きかった ( 図 3-19). 着地動作時の足関節においては, 重心の下降を防ぐために底屈筋群が大きく活動していた ( 図 3-15). さらに, 体重のサポートのために共収縮によって足関節が長く固定されていた ( 図 3-21). したがって,Trained は, 足関節背屈筋群の活動量を小さくして底屈筋群の活動を妨げない一方, 活動時間を長くして共収縮を長くすることで重心の下降を防いでいると考えられる. また,Trained ではどの走速度においても VL_On が早く ( 図 3-18),SO_On が低い走速度では遅く高い走速度では早かった ( 図 3-18) ことから, 膝関節は常に, 足関節は高い走速度で早く伸展および底屈させることが重要であると考えられる. 阿江ら (1978) は予備緊張が等尺性筋収縮により発揮される力や力の立ち上がりの速さなどを調査し, 予備緊張が大きくなると発揮張力が大きく, 力の立ち上がりが早くなったことを報告している. こ 79
83 のメカニズムとして, 予備緊張により興奮閾値および収縮速度が高く張力の大きい fast タイプの運動単位がより多く動員されるようになることを挙げ, 大きな力やパワーの要求される身体運動では, 主動作に移る前に予備緊張によって主働的な部位の神経や筋の活動水準を高めておくことが有効であると結論づけている ( 阿江ら,1978). 外側広筋 (VL) およびヒラメ筋 (SO) のバーストは着地動作に関わるものであり, 両筋の活動開始が接地前から発生していること, ランニングでは支持期においてランナーの体重を支えるために大きな力が要求されること (Arellano と Kram,2014) を考慮すると,Trained は外側広筋およびヒラメ筋を早く活動させ, 予備緊張によって fast タイプの運動単位を多く動員することで大きな力を発揮し, 体重の受け止めを行っていると考えられる. 特にヒラメ筋に関しては,Trained は低い走速度においては遅く活動を開始することで余計なエネルギー消費を抑えていたと考えられる. また, 走速度が増加すると活動開始が早まっていたが, これは走速度の増加に伴い着地衝撃が増大し, 足底の接地位置が前方へと移動して, より大きな底屈トルクが要求されるため, 予備緊張を長くすることでこれらに対応していると考えられる キック動作キック動作に関わる筋活動を示す変数では, 股関節筋群の筋活動量 (BF@PS) および膝関節まわりの % 共収縮時間 (RF-BF@PS,RF-GAM@PS) に有意な群間差もしくは交互作用が示された ( 図 3-16, 図 3-22). キック動作時の伸展を表す股関節および膝関節の動作範囲 (R h2,r k2 ) を比較すると,R h2 がR k2 よりも大きい ( 図 3-8) ことから, 股関節角度の変化が重心の水平移動距離の主要因であると考えられる. また, キック動作時の下肢 3 関節主働筋はコンセントリックな活動であるため, 股関節および膝関節に貢献する % 共収縮時間 (RF-BF@BR) は, 膝関節への貢献が股関節よりも大きいとみなした. 下肢筋活動について,Trained ではどの走速度においても股関節伸展筋群の筋活動量 80
84 が大きく ( 図 3-16), 走速度の増加に伴い膝関節まわりの % 共収縮時間 (RF-BF@PS,RF-GAM@PS) が Untrained よりも大きくなる傾向がみられた ( 図 3-22). 下肢動作について,Trained ではどの走速度においても支持期の膝関節の伸展動作範囲 (R k2 ) が有意に小さかった ( 図 3-10). したがって,Trained は股関節伸展筋群の筋活動量を大きくすることで大きな股関節伸展トルクを発揮して地面をキックしていると考えられる. このことは Kyröläinen ら (1999) の報告を支持する. また, 低い走速度においては短い共収縮, 高い走速度においては長い共収縮により膝関節を固定することで動作範囲を小さくし, 伊藤ら (1998) が報告している合理的なキック動作を行っていると考えられる 下腿の振出動作下腿の振出動作に関わる筋活動を示す変数では, 膝関節まわりの % 共収縮時間 (RF-BF@F2,RF-ST@F2,RF-GAM@F2) の有意な群間差が示された ( 図 3-23).Trained では Untrained に比べ, 膝関節まわりの % 共収縮時間 (RF-BF@F2,RF-ST@F2, RF-GAM@F2) が小さかった ( 図 3-23). このことは,Trained では下腿の振出時に膝関節を固める時間が短いことを示している. 前方スイング後半局面 (F2) では, 大腿の前方へのスイングが止まることで下腿が前方に振り出される. この時, 膝関節屈曲筋群 ( ハムストリングス ) がエキセントリックに収縮し, 下腿を制御する ( 阿江ら,1986). Trained では, 下腿の振出時に膝関節まわりの % 共収縮時間 (RF-BF@F2,RF-ST@F2,RF-GAM@F2) が短いことから, ハムストリングスが下腿の振出を抑制することを拮抗筋である膝関節伸展筋群が妨げることなく, 余計なエネルギー消費を抑えていると考えられる. また, このことから, 支持期における関節まわりの筋の共収縮とは対照的に, 遊脚期における脚の動作を効率的に行うには共収縮は有効ではない可能性があると考えられる. 81
85 4.3. ランニングエコノミーに影響を及ぼすバイオメカニクス的要因 重回帰分析本研究では, ランニングエコノミーを目的変数, 下肢の動作および筋活動を説明変数とする重回帰分析を行い, ランニングエコノミーに影響するバイオメカニクス的要因について検討した. 重回帰分析の説明変数として, 走速度で調整済のバイオメカニクス的変数を投入した. これらを調整せずに Trained および Untrained に共通した走速度のみを対象とすると,180,210,240 [m/min] のみとなり Trained のレースペースからかけ離れた走速度における走動作からランニングエコノミーを評価することになってしまう. さらに,Frost ら (2002) の報告のように, ある 1 つの走速度におけるモデルが他の走速度における結果と大きく異なってしまった場合には, この違いを説明することは難しい. したがって, 複数の走速度の結果からこれらの関係を明らかにする場合には, 本研究のように速度調整済の値を対象とすることが解決策の 1 つであると考えられる. また, 下肢動作を示す変数を説明変数とする重回帰分析では, 対象となる有効サンプル数が全体の 44.8 % と少なかった. これは,MVC の異常値, アーチファクトの混入, 筋活動のタイミング (On,Off) の異常検出があった場合のデータを欠損と扱ったことが原因である. しかし, 有効サンプルのみにおいても, ランニングエコノミーと実験当日のパフォーマンスとの相関は有意かつ高かった (r=-0.68,p<0.01). また, 有効サンプル数は Trained では 6 名分の 25 個,Untrained では 8 名分の 22 個であり, 大きな偏りはないため, 結果の妥当性は十分に保たれるものと考えられる. 図 4-1 は, 有効サンプルのみからみたランニングエコノミー (RE) と実験当日のパフォーマンス (PTS) との関係を示したものである. 82
86 Fig. 4-1 Relationships between RE and PTS in limited samples available for the multiple regression analysis ランニングエコノミーに影響を及ぼす下肢の動作および筋活動重回帰分析の結果より, 下肢の動作および筋活動の内, ランニングエコノミーには制動局面の外側広筋と半腱様筋の % 共収縮時間 (VL-ST@BR), 制動局面の大腿直筋と半腱様筋の % 共収縮時間 (RF-ST@BR), 制動局面の大腿直筋と大殿筋の % 共収縮時間 (RF-GMX@ BR), 前方スイング後半局面の大腿二頭筋の活動量 (BF@F2), ステップ長 (SL), 半腱様筋の総活動時間 (ST_DrtS) の影響が大きいことが明らかになった ( 表 3-2). また, 下肢動作のみを説明変数とする重回帰分析および下肢筋活動のみを説明変数とする重回帰分析から, ランニングエコノミーへの影響は下肢動作よりも下肢筋活動の方が大きいことが明らかになった ( 表 3-3, 表 3-4, 図 3-28). Frost ら (2002) および関 (2015) が報告しているように, 下肢動作には筋の弾性エネルギーの再利用, 二関節筋によるエネルギーの伝達, 主働筋と拮抗筋の共収縮によるトルク発揮の相殺, アイソメトリックな筋活動などが直接的には反映されない. したがって, 83
87 下肢動作そのものよりも動作を生じさせる原因的な要素である筋活動の方がエネルギー消費を直接反映でき, ランニングエコノミーへの影響が大きいと考えられる. また, 特に動作には全く反映されない主働筋および拮抗筋の % 共収縮時間が重要な説明変数として多く残ったと考えられる. しかし, 本研究の下肢動作を示す変数にはトルク, パワー, 力学的エネルギーなどのキネティクス変数, 下肢筋活動を示す変数には Frost ら (2002) および関 (2015) が指摘している二関節筋のエネルギー伝達量, 弾性エネルギーの貯蔵および再利用, 筋の収縮様式を考慮しなかったため, より詳細に下肢の動作と筋活動の影響を比較するのであれば, これらの変数を投入して重回帰分析を行うべきであろう. 制動局面の外側広筋と半腱様筋の % 共収縮時間 (VL-ST@BR), 制動局面の大腿直筋と半腱様筋の % 共収縮時間 (RF-ST@BR) および制動局面の大腿直筋と大殿筋の % 共収縮時間 (RF-GMX@BR) は, それぞれ 1,2,3 番目にランニングエコノミーへの影響が強く, VL-ST@BR および RF-GMX@BR は小さいほど,RF-ST@BR は大きいほど経済的であった ( 表 3-2). 制動局面の外側広筋と半腱様筋の % 共収縮時間は膝関節を, 制動局面の大腿直筋と大殿筋の % 共収縮時間は股関節を固める共収縮であり, ランニングエコノミーと有意な正の相関がみられた ( 表 3-2). また, 制動局面の大腿直筋と半腱様筋の % 共収縮時間は股関節および膝関節を固める共収縮でありランニングエコノミーと有意な負の相関がみられた ( 表 3-2). このことから, 経済的なランナーは, 一関節のみに作用する % 共収縮時間を短く, 二関節に作用する % 共収縮時間を長くすることで, 関節を効果的かつ経済的に安定させていると考えられる. この結果は, 制動局面の大腿直筋と半腱様筋の % 共収縮時間については Heise ら (2008) と同様であり, 制動局面の外側広筋と半腱様筋の % 共収縮時間および制動局面の大腿直筋と大殿筋の % 共収縮時間については Moore ら (2013) と同様であった. したがって, 包括的にランニングエコノミーを調査したことにより, 先行研究の矛盾について言及することができたと考えられる. また, 重心の下降時における股関節の動作範囲が膝関節 84
88 および足関節と比較して小さいことから, 股関節は体重の受け止めに関して, 膝関節および足関節ほど貢献しないと考えられる. したがって, 制動局面の大腿直筋と大殿筋の % 共収縮時間は体重の受け止めへの貢献が小さい股関節の共収縮であるという点からも, この共収縮が長いことは余計なエネルギー消費を招くと考えられる. 前方スイング後半局面の大腿二頭筋の活動量 (BF@F2) はランニングエコノミーへの影響が 4 番目に大きく, 値が大きいほど経済的であった ( 表 3-2). 前方スイング後半局面 (F2) では下腿の振出が行われる. 大腿二頭筋 (BF) は支持期全般および遊脚期後半で活動しており ( 図 3-13), 支持期での股関節伸展および遊脚期後半の下腿の振出の制御に貢献していると考えられる. 本研究の結果から, 経済的なランナーは, 前方スイング後半局面の大腿二頭筋を大きく活動させることで, 阿江ら (1986) が述べているように下腿の振出の過度な回転を抑制して脚の回転を早め, 続く接地時の足の接地位置を身体重心に近づけることでブレーキを減らしていると考えられる. また, 下腿の振出動作 ( 膝関節の伸展 ) に拮抗作用をもつ大腿二頭筋の活動が大きいほど経済的であったことから, で述べたように共収縮によって関節を固定しながら下腿の振出を制御するのではなく, 拮抗筋の作用のみによってこれを行うことで, 余計なエネルギー消費を抑えて高い経済性を獲得していると考えられる. このことは, 体重の受け止めを伴う支持期では関節の共収縮が経済性に貢献しうるが, 脚が前後に大きくスイングする遊脚期では関節の共収縮が経済性を低下させる可能性を示唆している. ステップ長 (SL) は, ランニングエコノミーへの影響が 5 番目に大きく, 値が大きいほど経済的であった ( 表 3-2). ステップ長を大きくするためには推進局面の動作の影響が大きいため, 経済的なランナーは, 脚の伸展筋群の活動により地面を強くキックすることで, ステップ長を大きくしていると考えられる. しかしながら, この結果はステップ頻度が大きいほど経済的であると報告している Frost ら (2002) および Halvorsen ら (2011) とは矛盾する. しかし, ステップ長およびステップ頻度は 1 歩のみを表す変数であるため, 多 85
89 くの歩数を含むランニング全体について考えた場合には, ステップ頻度が高ければステップ長が高い場合よりも小さなエネルギーがより多くのサイクルに渡って消費されることになる. したがって, ステップ長が高い方が経済的であるという本研究の結果が生じた原因については深く言及できない ランニングエコノミーに影響を及ぼす下肢動作下肢動作のみを説明変数としたランニングエコノミーの重回帰分析の結果から, ランニングエコノミーに影響を及ぼす下肢動作として,% 接地直前局面時間 (%POT), ステップ長 (SL), 仮想重心とした大転子中点の最高点から接地時までの下降量 (H4), 遊脚期の股関節の屈曲動作範囲 (R h3 ), 遊脚期の膝関節の最大屈曲角速度 (ω k3 ) の影響が大きいことが明らかになった ( 表 3-3). % 接地直前局面時間はランニングエコノミーへの影響が最も大きく, 値が大きいほど経済的であった ( 表 3-3).% 接地直前局面時間は遊脚期の股関節の最大伸展角速度 (ω h4 ) および伸展動作範囲 (R h4 ) とはともに有意な正の相関がみられ,% 接地距離 (%TDD) とは有意な負の相関がみられた. 図 4-2 は,180,210,240 [m/min] における % 接地直前局面時間と遊脚期の股関節の最大伸展角速度, 遊脚期の股関節の伸展動作範囲および % 接地距離との関係を示したものである. 接地直前局面では大腿の振り戻しが行われることから, 経済的なランナーは,% 接地直前局面時間を長くすることで股関節を速く大きく伸展し, 接地時のブレーキを減少させていると考えられる. 86
90 Fig. 4-2 Relationships between %POT and ω h4, R h4, %TDD at 180, 210, 240 [m/min] 重心の最高点から接地時までの下降量は 3 番目にランニングエコノミーへの影響が大き 87
91 く, 小さいほど経済的であった ( 表 3-3). 重心の最高点から接地時までの下降量を小さくするためには接地時の動作の影響が大きいため, 経済的なランナーは膝関節をより伸展位 ( 屈曲が小さい姿勢 ), 足関節をより底屈位 ( 背屈が小さい姿勢 ) で接地することにより, 遊脚期における重心の下降を防いでいると考えられる. また, 膝関節をより伸展位, 足関節をより底屈位で接地するためには, 接地直前の膝関節伸展筋群 ( 大腿直筋, 外側広筋など ), 足関節底屈筋群 ( 腓腹筋, ヒラメ筋 ) の活動が重要であると考えられる. 遊脚期の股関節の屈曲動作範囲は,4 番目にランニングエコノミーへの影響が大きく, 小さいほど経済的であった ( 表 3-3). 遊脚期の股関節の屈曲動作範囲は, 股関節の遊脚期の最大伸展角度 (θ h2 ) と有意な正の相関がみられ, 股関節の遊脚期の最大伸展角度は離地直後局面の大腿直筋の活動量 (RF@AO) と有意な負の相関がみられた. 図 4-3 は,180,210, 240 [m/min] における股関節の遊脚期の最大伸展角度と遊脚期の股関節の屈曲動作範囲, 股関節の遊脚期の最大伸展角度と大腿直筋の活動量との関係を示したものである. 以上のことから, 経済的なランナーは離地直後局面のフォロースルーを大腿直筋のエキセントリックな活動により小さくし, 脚のリカバリーを早めていると考えられる. このことは,Heise ら (1996) および走の有効性を扱った榎本ら (1999) の報告を支持する. 遊脚期の膝関節の最大屈曲角速度は 5 番目にランニングエコノミーへの影響が大きく, 大きいほど経済的であった ( 表 3-3). 遊脚期の膝関節の最大屈曲角速度と同様のタイミングで大腿のスイングが行われている ( 図 3-11). したがって, 経済的なランナーは, 膝関節を速く屈曲して下腿を引きつけ, 脚全体の慣性モーメントを減少させることによって大腿をスイングしやすくしていると考えられる. 88
92 Fig. 4-3 Relationships between θ h2 and R h3, RF@AO at 180, 210, 240 [m/min] ランニングエコノミーに影響を及ぼす下肢筋活動下肢筋活動のみを説明変数としたランニングエコノミーの重回帰分析の結果から, ランニングエコノミーに影響を及ぼす下肢筋活動として, 制動局面の外側広筋と半腱様筋の % 共収縮時間 (VL-ST@BR), 制動局面の大腿直筋と半腱様筋の % 共収縮時間 (RF-ST@BR), 前方スイング後半局面の大腿二頭筋の活動量 (BF@F2), 制動局面の大腿直筋と大殿筋の % 共収縮時間 (RF-GMX@BR), ヒラメ筋の活動時間 (SO_Drt) の影響が大きいことが明らかになった ( 表 3-4). これらの変数は下肢の動作および筋活動を示す変数を説明変数としたモデルにおいて影響が大きい変数と同様であり ( 表 3-2), ヒラメ筋の活動時間のみが異 89
93 なっていた. ヒラメ筋の活動時間は,5 番目にランニングエコノミーへの影響が大きく, 小さいほど経済的であった ( 表 3-4). ヒラメ筋は接地前後において大きな活動がみられ ( 図 3-13), 体重のサポートに関わる筋であると考えられる で述べたように, 弾性エネルギーを再利用するためには, エキセントリックな収縮からコンセントリックな収縮への素早い切り替えが重要である (Komi ら,1997). よって, 経済的なランナーは, 接地前後でヒラメ筋を短く活動させることにより, 余計なエネルギー消費を抑え, 弾性エネルギーを再利用して高い経済性を獲得していると考えられる トレーニングへの提言長距離ランナーの下肢の動作および筋活動の特徴についての結果から, 着地動作において共収縮による膝関節および足関節の固定, ヒラメ筋の弾性エネルギーの再利用, 外側広筋およびヒラメ筋の予備緊張が示唆された. また, ランニングエコノミーに影響を及ぼすバイオメカニクス的要因についての結果から, 制動局面の共収縮による股関節および膝関節の固定, ヒラメ筋の弾性エネルギーの再利用が示唆された. このことから, 伸張短縮サイクル (Stretch Shortening Cycle:SSC) が長距離走パフォーマンスおよびランニングエコノミーを高める上で重要であると考えられる.SSC とは, 前述したように短い時間に伸張性筋収縮を力強く行う身体運動であり,SSC を行うことで長距離走パフォーマンスやランニングエコノミーが向上したという報告がある (Pavvolainen ら,1999;Spurrs ら,2003). SSC を高めるためには, 予備緊張による力の立ち上がりの早まり, 関節の剛性の増加, エキセントリックな筋収縮からコンセントリックな筋収縮への素早い移行による弾性エネルギーの再利用が重要であることが報告されている (Komi ら,1997;Spurrs ら,2003). したがって, 本研究の結果から示唆された共収縮による下肢 3 関節の固定, ヒラメ筋の弾性エネルギーの再利用, 外側広筋およびヒラメ筋の予備緊張が SSC を高めるという点にお 90

,")
94 いても重要であり, これらを改善することにより長距離走パフォーマンスおよびランニングエコノミーを高められると考えられる. これらを改善するためには, 力強く地面を蹴る動作を強調したバウンディング, 一定の高さから鉛直に落下し同程度の高さに復帰するボックスジャンプなどのようなプライオメトリクストレーニングが有効であると考えられる (Spurrs ら,2003). 図 4-4 は, バウンディングおよびボックスジャンプの例を示したものである. また, 学習された運動において, 筋活動は事前にプログラム化されたものであるため, 着地前後においては意識的に力発揮をする必要はなく (Kyröläinen ら,2005), 長距離ランナーの主練習である走行とは別にこのようなトレーニング行い, 無駄のない着地動作を反復して覚えることが有効であろう. Fig. 4-4 Bounding (upper) and box jump (bottom, Reference: Meiji Corp.) 91
中京大学体育研究所紀要 Vol 研究報告 ソフトボールのバッティングにおけるストライド長と外力モーメントの関係 堀内元 1) 平川穂波 2) 2) 桜井伸二 Relationship between stride length and external moment in softb
 平川穂波 2) 2) 桜井伸二 Relationship between stride length and external moment in softb") 中京大学体育研究所紀要 Vol.31 2017 研究報告 ソフトボールのバッティングにおけるストライド長と外力モーメントの関係 堀内元 1) 平川穂波 2) 2) 桜井伸二 Relationship between stride length and external moment in softball batting Gen HORIUCHI, Honami HIRAKAWA, Shinji SAKURAI
中京大学体育研究所紀要 Vol.31 2017 研究報告 ソフトボールのバッティングにおけるストライド長と外力モーメントの関係 堀内元 1) 平川穂波 2) 2) 桜井伸二 Relationship between stride length and external moment in softball batting Gen HORIUCHI, Honami HIRAKAWA, Shinji SAKURAI
歩行およびランニングからのストップ動作に関する バイオメカニクス的研究
 学位論文要旨 歩行およびランニングからのストップ動作に関する バイオメカニクス的研究 広島大学大学院教育学研究科 文化教育開発専攻 冨永亮 目次 第 1 章諸言 (1) 第 1 節研究の背景と意義 第 2 節バイオメカニクス的手法を用いたストップ動作の分析 第 3 節本研究の目的 第 2 章速度の変化がストップ動作の地面反力に及ぼす影響 (3) 第 1 節目的第 2 節方法第 3 節結果第 4 節考察
学位論文要旨 歩行およびランニングからのストップ動作に関する バイオメカニクス的研究 広島大学大学院教育学研究科 文化教育開発専攻 冨永亮 目次 第 1 章諸言 (1) 第 1 節研究の背景と意義 第 2 節バイオメカニクス的手法を用いたストップ動作の分析 第 3 節本研究の目的 第 2 章速度の変化がストップ動作の地面反力に及ぼす影響 (3) 第 1 節目的第 2 節方法第 3 節結果第 4 節考察
SICE東北支部研究集会資料(2011年)
") 269 (2011.12.12) 269-10 Basic analysis of coaching in sprint motion using three dimensional motion capture data Masahiro Nagayama,Takayuki Takahashi *, ** *Graduate School Fukushima University,**Fukushima
269 (2011.12.12) 269-10 Basic analysis of coaching in sprint motion using three dimensional motion capture data Masahiro Nagayama,Takayuki Takahashi *, ** *Graduate School Fukushima University,**Fukushima
<4D F736F F D2095F18D908F B78B9797A E8FD58C8282C AE8DEC C967B2E646F6378>
 1 / 8 長距離走における走速度増大に伴う着地衝撃と走動作の関係 榎本靖士, 谷川聡, 向井直樹, 阿江通良 筑波大学体育系 1. はじめにランニングにおいて地面反力の着地後 50ms 以内に生じる第 1 ピーク ( 着地衝撃または衝撃力 ) は, 障害との関係ばかりでなく (Hreljac, 2004), ランニングエコノミーとの関係 (Chang and Kram, 1999) についても研究され,
1 / 8 長距離走における走速度増大に伴う着地衝撃と走動作の関係 榎本靖士, 谷川聡, 向井直樹, 阿江通良 筑波大学体育系 1. はじめにランニングにおいて地面反力の着地後 50ms 以内に生じる第 1 ピーク ( 着地衝撃または衝撃力 ) は, 障害との関係ばかりでなく (Hreljac, 2004), ランニングエコノミーとの関係 (Chang and Kram, 1999) についても研究され,
を0%,2 枚目の初期接地 (IC2) を 100% として歩行周期を算出した. 初期接地 (IC1) は垂直 9) 分力 (Fz) が 20Nを超えた時点, 荷重応答期 (LR) は Fz の第 1ピーク時, および遊脚後期 (Tsw) は IC1 から 10% 前の時点とした 10). 本研究の
 を 100% として歩行周期を算出した. 初期接地 (IC1) は垂直 9) 分力 (Fz) が 20Nを超えた時点, 荷重応答期 (LR) は Fz の第 1ピーク時, および遊脚後期 (Tsw) は IC1 から 10% 前の時点とした 10). 本研究の") 歩行における随意的足関節背屈運動が大腿四頭筋の筋活動に及ぼす影響について 畑山将時郎 < 要約 > 本研究の目的は, 歩行の初期接地時に随意的に背屈運動を行わせて前脛骨筋の筋活動を高めることで大腿四頭筋の筋活動が変化するのか, また, もし大腿四頭筋の筋活動が変化すればそれが荷重応答期にも持続するのかを検証することだった. 対象は, 若年健常者 10 名だった. 歩行路の中に床反力計を設置し, 歩行周期を算出した.
歩行における随意的足関節背屈運動が大腿四頭筋の筋活動に及ぼす影響について 畑山将時郎 < 要約 > 本研究の目的は, 歩行の初期接地時に随意的に背屈運動を行わせて前脛骨筋の筋活動を高めることで大腿四頭筋の筋活動が変化するのか, また, もし大腿四頭筋の筋活動が変化すればそれが荷重応答期にも持続するのかを検証することだった. 対象は, 若年健常者 10 名だった. 歩行路の中に床反力計を設置し, 歩行周期を算出した.
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典
 南慶典") 多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
膝関節運動制限による下肢の関節運動と筋活動への影響
 膝関節運動制限による下肢の関節運動と筋活動への影響 支持面の前後傾斜刺激による検討 山岸祐太 < 要約 > 本研究の目的は, 膝関節装具により膝関節運動を制限し, 支持面の前後回転傾斜刺激を与えた場合の下肢関節や姿勢筋への影響を調べ, 膝関節運動の働きを明確にすること, および股 足関節運動が膝関節運動をどのように補償しているのかを明確にすることである. 被験者は健常若年者 10 名とした. 傾斜刺激は周波数
膝関節運動制限による下肢の関節運動と筋活動への影響 支持面の前後傾斜刺激による検討 山岸祐太 < 要約 > 本研究の目的は, 膝関節装具により膝関節運動を制限し, 支持面の前後回転傾斜刺激を与えた場合の下肢関節や姿勢筋への影響を調べ, 膝関節運動の働きを明確にすること, および股 足関節運動が膝関節運動をどのように補償しているのかを明確にすることである. 被験者は健常若年者 10 名とした. 傾斜刺激は周波数
Effects of running ability and baton pass factor on race time in mr Daisuke Yamamoto, Youhei Miyake Keywords track and field sprint baton pass g
 Effects of running ability and baton pass factor on race time in 4100 mr Daisuke Yamamoto, Youhei Miyake Keywords track and field sprint baton pass gain time Abstracts The purpose of this study was to
Effects of running ability and baton pass factor on race time in 4100 mr Daisuke Yamamoto, Youhei Miyake Keywords track and field sprint baton pass gain time Abstracts The purpose of this study was to
横浜市環境科学研究所
 周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
学位論文の内容の要旨 論文提出者氏名 長谷川智之 論文審査担当者 主査丸光惠副査星治 齋藤やよい 論文題目 Relationship between weight of rescuer and quality of chest compression during cardiopulmonary r
 学位論文の内容の要旨 論文提出者氏名 長谷川智之 論文審査担当者 主査丸光惠副査星治 齋藤やよい 論文題目 Relationship between weight of rescuer and quality of chest compression during cardiopulmonary resuscitation ( 論文内容の要旨 ) < 結言 > 心肺蘇生法 (CPR) は 最適な循環と酸素化の達成を目標として
学位論文の内容の要旨 論文提出者氏名 長谷川智之 論文審査担当者 主査丸光惠副査星治 齋藤やよい 論文題目 Relationship between weight of rescuer and quality of chest compression during cardiopulmonary resuscitation ( 論文内容の要旨 ) < 結言 > 心肺蘇生法 (CPR) は 最適な循環と酸素化の達成を目標として
<4D F736F F D20819A918D8A E58D988BD881842E646F63>
 共同研究組織中間報告 (2010 年度 ) いわゆる滞空力における大腰筋の役割 The role of the psoas major muscle in jumping movement 主担研究員名 : 澤井亨分担研究員名 : 平井富弘 大槻伸吾 仲田秀臣 瀬戸孝幸 本研究成果 : 平成 2011 年バレーボール学会研究発表 バレーボール選手における大腰筋に関する研究 ( バレーボール研究 Vol13
共同研究組織中間報告 (2010 年度 ) いわゆる滞空力における大腰筋の役割 The role of the psoas major muscle in jumping movement 主担研究員名 : 澤井亨分担研究員名 : 平井富弘 大槻伸吾 仲田秀臣 瀬戸孝幸 本研究成果 : 平成 2011 年バレーボール学会研究発表 バレーボール選手における大腰筋に関する研究 ( バレーボール研究 Vol13
the highest value at the midpoint of the transferring motion when subjects began to twist patient s body to the wheelchair from the bed. And the mean
 筋電図と映像分析からみた介助動作の特徴 - 体位変換動作と車いす移乗動作について - 松井健 小林培男 岡川暁 Characteristics of nursing-care motion in terms of electromyographic and motion analysis during lifting and posture -changing on bed, and transferring
筋電図と映像分析からみた介助動作の特徴 - 体位変換動作と車いす移乗動作について - 松井健 小林培男 岡川暁 Characteristics of nursing-care motion in terms of electromyographic and motion analysis during lifting and posture -changing on bed, and transferring
スライド 1
 データ解析特論重回帰分析編 2017 年 7 月 10 日 ( 月 )~ 情報エレクトロニクスコース横田孝義 1 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える 具体的には y = a + bx という回帰直線 ( モデル ) でデータを代表させる このためにデータからこの回帰直線の切片 (a) と傾き (b) を最小
データ解析特論重回帰分析編 2017 年 7 月 10 日 ( 月 )~ 情報エレクトロニクスコース横田孝義 1 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える 具体的には y = a + bx という回帰直線 ( モデル ) でデータを代表させる このためにデータからこの回帰直線の切片 (a) と傾き (b) を最小
2 片脚での体重支持 ( 立脚中期, 立脚終期 ) 60 3 下肢の振り出し ( 前遊脚期, 遊脚初期, 遊脚中期, 遊脚終期 ) 64 第 3 章ケーススタディ ❶ 変形性股関節症ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
 60 3 下肢の振り出し ( 前遊脚期, 遊脚初期, 遊脚中期, 遊脚終期 ) 64 第 3 章ケーススタディ ❶ 変形性股関節症ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー") PT OT ビジュアルテキスト 姿勢 動作 歩行分析 contents 序ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー畠中泰彦 3 本書の使い方ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
PT OT ビジュアルテキスト 姿勢 動作 歩行分析 contents 序ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー畠中泰彦 3 本書の使い方ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
1.民営化
 参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
Effects of restricted ankle joint mobility on lower extremities joint motions during a stop-jump task The purposes of this study were to examine the e
 足関節の可動域の制限が跳躍時の下肢関節の動作に及ぼす影響 Effects of restricted ankle joint mobility on lower extremities joint motions during a stop-jump task 09M55049 夏雷 Xia Lei 指導教員 : 丸山剛生准教授 審査員 : 石井源信教授, 須田和裕准教授 本研究の目的は, 足関節の可動域と下肢関節の動作との関係性を検討するため,
足関節の可動域の制限が跳躍時の下肢関節の動作に及ぼす影響 Effects of restricted ankle joint mobility on lower extremities joint motions during a stop-jump task 09M55049 夏雷 Xia Lei 指導教員 : 丸山剛生准教授 審査員 : 石井源信教授, 須田和裕准教授 本研究の目的は, 足関節の可動域と下肢関節の動作との関係性を検討するため,
体幹トレーニングが体幹の安定性とジャンプパフォーマンスに与える影響の検討 体幹トレーニングとしては レジスタンスツイスト ( 以下 RT) を採用した RT とは 図 1 ( 上段 ) のように 仰臥位で四肢を上に挙げ四つ這いする体勢を保持している実施者に対して 体幹が捻られるように補助者が力を加え
 を採用した RT とは 図 1 ( 上段 ) のように 仰臥位で四肢を上に挙げ四つ這いする体勢を保持している実施者に対して 体幹が捻られるように補助者が力を加え") 中京大学体育研究所紀要 Vol.32 218 研究報告 体幹トレーニングが体幹の安定性とジャンプパフォーマンスに与える影響の検討 鈴木雄貴 1) 2) 桜井伸二 Effect of Trunk Stabilization Exercises on Jump performance and Trunk Stability Yuki SUZUKI, Shinji SAKURAI Ⅰ はじめに近年 活躍するアスリートの多くが
中京大学体育研究所紀要 Vol.32 218 研究報告 体幹トレーニングが体幹の安定性とジャンプパフォーマンスに与える影響の検討 鈴木雄貴 1) 2) 桜井伸二 Effect of Trunk Stabilization Exercises on Jump performance and Trunk Stability Yuki SUZUKI, Shinji SAKURAI Ⅰ はじめに近年 活躍するアスリートの多くが
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
研究成果報告書
 様式 C-19 F-19-1 Z-19 CK-19( 共通 ) 1. 研究開始当初の背景近年のランニングブーム, マラソンブームの影響もあり, 自然の中の小径 ( 以下, トレイル ) を走る トレイルランニング が盛んになってきている ( 以前は マラニック という名称も使われていたが, 本研究は上記の名称を用いる ). トレイルランニング専門の雑誌も発刊され ( たとえば三栄書房 ラン & トレイル
様式 C-19 F-19-1 Z-19 CK-19( 共通 ) 1. 研究開始当初の背景近年のランニングブーム, マラソンブームの影響もあり, 自然の中の小径 ( 以下, トレイル ) を走る トレイルランニング が盛んになってきている ( 以前は マラニック という名称も使われていたが, 本研究は上記の名称を用いる ). トレイルランニング専門の雑誌も発刊され ( たとえば三栄書房 ラン & トレイル
76 柴山ほか. 緒言 110 m ハードル走 ( 以下 110 mh 走と表記 ) は, 9.14 m 間隔で置かれた高さ1.067 m のハードルを10 台越えて, スタートからゴールまでをできる限り短い時間で走り抜ける競技である.110 mh 走の世界記録は2008 年に Dayron Rob
 は, 9.14 m 間隔で置かれた高さ1.067 m のハードルを10 台越えて, スタートからゴールまでをできる限り短い時間で走り抜ける競技である.110 mh 走の世界記録は2008 年に Dayron Rob") 体育学研究 56 75 88,2011 75 一流 110 m ハードル走選手の 1 サイクル動作に関するキネマティクス的研究 疾走速度および脚長と動作の関連から 柴山一仁 1) 藤井範久 2) 阿江通良 2) Kazuhito Shibayama 1, Norihisa Fujii 2 and Michiyoshi Ae 2 :Kinematicstudyof1 cycle motion in elite
体育学研究 56 75 88,2011 75 一流 110 m ハードル走選手の 1 サイクル動作に関するキネマティクス的研究 疾走速度および脚長と動作の関連から 柴山一仁 1) 藤井範久 2) 阿江通良 2) Kazuhito Shibayama 1, Norihisa Fujii 2 and Michiyoshi Ae 2 :Kinematicstudyof1 cycle motion in elite
国士舘大学体育研究所報第29巻(平成22年度)
") THE ANNUAL REPORTS OF HEALTH, PHYSICAL EDUCATION AND SPORT SCIENCE VOL.29, 1-6, 2010 1 原 著 男子新体操選手の膝関節伸展 屈曲運動における両側性機能低下 Bilateral deficit during isometric knee extension and flexion movement on male rhythmic
THE ANNUAL REPORTS OF HEALTH, PHYSICAL EDUCATION AND SPORT SCIENCE VOL.29, 1-6, 2010 1 原 著 男子新体操選手の膝関節伸展 屈曲運動における両側性機能低下 Bilateral deficit during isometric knee extension and flexion movement on male rhythmic
Microsoft Word docx
 トランポリンのストレートジャンプにおける踏切中の筋活動と着床位置との関係 松島正知, 矢野澄雄 神戸大学大学院人間発達環境学研究科 キーワード : トランポリン, 踏切動作, 移動距離 抄録 本研究はトランポリンの踏切における, 下肢および体幹筋群の活動と移動距離との関係を明らかにすることを目的とした. 被験者 9 名に 10 本跳躍を行わせ, 中心位置の跳躍と後方位置の跳躍に分けた. 測定は体幹および下肢筋の筋電図,
トランポリンのストレートジャンプにおける踏切中の筋活動と着床位置との関係 松島正知, 矢野澄雄 神戸大学大学院人間発達環境学研究科 キーワード : トランポリン, 踏切動作, 移動距離 抄録 本研究はトランポリンの踏切における, 下肢および体幹筋群の活動と移動距離との関係を明らかにすることを目的とした. 被験者 9 名に 10 本跳躍を行わせ, 中心位置の跳躍と後方位置の跳躍に分けた. 測定は体幹および下肢筋の筋電図,
(Microsoft Word - \224\216\216m\230_\225\266\201i\217\254\227\321\212C\201j.doc)
") 課程内 早稲田大学審査学位論文 博士 ( スポーツ科学 ) 競技レベルの高い陸上短距離選手における 走速度の決定因子 : 短距離走の加速局面を対象として Factors influencing performance of elite sprinters: focusing on the acceleration phase of running 2011 年 1 月 早稲田大学大学院スポーツ科学研究科
課程内 早稲田大学審査学位論文 博士 ( スポーツ科学 ) 競技レベルの高い陸上短距離選手における 走速度の決定因子 : 短距離走の加速局面を対象として Factors influencing performance of elite sprinters: focusing on the acceleration phase of running 2011 年 1 月 早稲田大学大学院スポーツ科学研究科
吉備国際大学研究紀要 ( 保健科学部 ) 第 20 号,13~18,2010 閉運動連鎖最大下出力時における下肢筋収縮様式の解析 * 河村顕治加納良男 ** 酒井孝文 ** 山下智徳 ** 松尾高行 ** 梅居洋史 *** 井上茂樹 Analysis of muscle recruitment pa
 第 20 号,13~18,2010 閉運動連鎖最大下出力時における下肢筋収縮様式の解析 * 河村顕治加納良男 ** 酒井孝文 ** 山下智徳 ** 松尾高行 ** 梅居洋史 *** 井上茂樹 Analysis of muscle recruitment pa") 吉備国際大学研究紀要 ( 保健科学部 ) 第 20 号,13~18,2010 閉運動連鎖最大下出力時における下肢筋収縮様式の解析 * 河村顕治加納良男 酒井孝文 山下智徳 松尾高行 梅居洋史 * 井上茂樹 Analysis of muscle recruitment pattern of the lower extremity under submaximal closed kinetic chain
吉備国際大学研究紀要 ( 保健科学部 ) 第 20 号,13~18,2010 閉運動連鎖最大下出力時における下肢筋収縮様式の解析 * 河村顕治加納良男 酒井孝文 山下智徳 松尾高行 梅居洋史 * 井上茂樹 Analysis of muscle recruitment pattern of the lower extremity under submaximal closed kinetic chain
スライド 1
 データ解析特論第 10 回 ( 全 15 回 ) 2012 年 12 月 11 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 終了 11/13 11/20 重回帰分析をしばらくやります 12/4 12/11 12/18 2 前回から回帰分析について学習しています 3 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える
データ解析特論第 10 回 ( 全 15 回 ) 2012 年 12 月 11 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 終了 11/13 11/20 重回帰分析をしばらくやります 12/4 12/11 12/18 2 前回から回帰分析について学習しています 3 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える
小野寺孝一 三辺忠雄 小川耕平 山崎先也 /JLAS(vol.41,2013)11-18 トレーニングの効果判定 : トレーニングによる発揮筋力の改善を評価するため トレーニン グ前後において最大努力で 30 回の等速性下肢伸展を角速度 60 度 / 秒で行い 発揮筋力 (Nm) を 測定した トレ
11-18 トレーニングの効果判定 : トレーニングによる発揮筋力の改善を評価するため トレーニン グ前後において最大努力で 30 回の等速性下肢伸展を角速度 60 度 / 秒で行い 発揮筋力 (Nm) を 測定した トレ") 研究紀要富山大学杉谷キャンパス一般教育第 41 号 (2013) JLAS(vol.41,2013) 寄稿論文 主観的強度を用いた最大下努力における筋力トレーニングの効果 小野寺孝一 三辺忠雄 小川耕平 山崎先也 1. 概要筋力トレーニングは競技者のパーフォーマンスを高めるためのみならず 高齢者のQOLの向上 介護予防 一般人の健康の維持増進の観点からも重要であり 必要性が認識されている 特に近年では本格的な高齢化社会を迎え
研究紀要富山大学杉谷キャンパス一般教育第 41 号 (2013) JLAS(vol.41,2013) 寄稿論文 主観的強度を用いた最大下努力における筋力トレーニングの効果 小野寺孝一 三辺忠雄 小川耕平 山崎先也 1. 概要筋力トレーニングは競技者のパーフォーマンスを高めるためのみならず 高齢者のQOLの向上 介護予防 一般人の健康の維持増進の観点からも重要であり 必要性が認識されている 特に近年では本格的な高齢化社会を迎え
Microsoft PowerPoint - 統計科学研究所_R_重回帰分析_変数選択_2.ppt
 重回帰分析 残差分析 変数選択 1 内容 重回帰分析 残差分析 歯の咬耗度データの分析 R で変数選択 ~ step 関数 ~ 2 重回帰分析と単回帰分析 体重を予測する問題 分析 1 身長 のみから体重を予測 分析 2 身長 と ウエスト の両方を用いて体重を予測 分析 1 と比べて大きな改善 体重 に関する推測では 身長 だけでは不十分 重回帰分析における問題 ~ モデルの構築 ~ 適切なモデルで分析しているか?
重回帰分析 残差分析 変数選択 1 内容 重回帰分析 残差分析 歯の咬耗度データの分析 R で変数選択 ~ step 関数 ~ 2 重回帰分析と単回帰分析 体重を予測する問題 分析 1 身長 のみから体重を予測 分析 2 身長 と ウエスト の両方を用いて体重を予測 分析 1 と比べて大きな改善 体重 に関する推測では 身長 だけでは不十分 重回帰分析における問題 ~ モデルの構築 ~ 適切なモデルで分析しているか?
8 A B B B B B B B B B 175
 4.. 共分散分析 4.1 共分散分析の原理 共分散分析は共変数の影響を取り除いて平均値を比較する手法 (1) 共分散分析 あるデータを群間比較したい そのデータに影響を与える他のデータが存在する 他のデータの影響を取り除いて元のデータを比較したい 共分散分析を適用 共分散分析 (ANCOVA:analysis of covariance アンコバ ) は分散分析に回帰分析の原理を応 用し 他のデータの影響を考慮して目的のデータを総合的に群間比較する手法
4.. 共分散分析 4.1 共分散分析の原理 共分散分析は共変数の影響を取り除いて平均値を比較する手法 (1) 共分散分析 あるデータを群間比較したい そのデータに影響を与える他のデータが存在する 他のデータの影響を取り除いて元のデータを比較したい 共分散分析を適用 共分散分析 (ANCOVA:analysis of covariance アンコバ ) は分散分析に回帰分析の原理を応 用し 他のデータの影響を考慮して目的のデータを総合的に群間比較する手法
国士舘大学体育研究所報第29巻(平成22年度)
") THE ANNUAL REPORTS OF HEALTH, PHYSICAL EDUCATION AND SPORT SCIENCE VOL.29, 27-35, 2010 27 原 著 Characteristics of muscle activity on lower limb muscles during a pedaling exercise consisting of different
THE ANNUAL REPORTS OF HEALTH, PHYSICAL EDUCATION AND SPORT SCIENCE VOL.29, 27-35, 2010 27 原 著 Characteristics of muscle activity on lower limb muscles during a pedaling exercise consisting of different
ギリシャ文字の読み方を教えてください
 埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 慣性モーメント -1/6 テーマ 01: 慣性モーメント (Momet of ietia) コマ回しをすると, 長い時間回転させるには重くて大きなコマを選ぶことや, ひもを早く引くことが重要であることが経験的にわかります. 遊びを通して, 回転の運動エネルギーを増やせば, 回転の勢いが増すことを学習できるので, 機械系の学生にとってコマ回しも大切な体験学習のひとつと言えます.
埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 慣性モーメント -1/6 テーマ 01: 慣性モーメント (Momet of ietia) コマ回しをすると, 長い時間回転させるには重くて大きなコマを選ぶことや, ひもを早く引くことが重要であることが経験的にわかります. 遊びを通して, 回転の運動エネルギーを増やせば, 回転の勢いが増すことを学習できるので, 機械系の学生にとってコマ回しも大切な体験学習のひとつと言えます.
博士論文 考え続ける義務感と反復思考の役割に注目した 診断横断的なメタ認知モデルの構築 ( 要約 ) 平成 30 年 3 月 広島大学大学院総合科学研究科 向井秀文
 平成 30 年 3 月 広島大学大学院総合科学研究科 向井秀文") 博士論文 考え続ける義務感と反復思考の役割に注目した 診断横断的なメタ認知モデルの構築 ( 要約 ) 平成 30 年 3 月 広島大学大学院総合科学研究科 向井秀文 目次 はじめに第一章診断横断的なメタ認知モデルに関する研究動向 1. 診断横断的な観点から心理的症状のメカニズムを検討する重要性 2 2. 反復思考 (RNT) 研究の歴史的経緯 4 3. RNT の高まりを予測することが期待されるメタ認知モデル
博士論文 考え続ける義務感と反復思考の役割に注目した 診断横断的なメタ認知モデルの構築 ( 要約 ) 平成 30 年 3 月 広島大学大学院総合科学研究科 向井秀文 目次 はじめに第一章診断横断的なメタ認知モデルに関する研究動向 1. 診断横断的な観点から心理的症状のメカニズムを検討する重要性 2 2. 反復思考 (RNT) 研究の歴史的経緯 4 3. RNT の高まりを予測することが期待されるメタ認知モデル
高齢者におけるサルコペニアの実態について みやぐち医院 宮口信吾 我が国では 高齢化社会が進行し 脳血管疾患 悪性腫瘍の増加ばかりでなく 骨 筋肉を中心とした運動器疾患と加齢との関係が注目されている 要介護になる疾患の原因として 第 1 位は脳卒中 第 2 位は認知症 第 3 位が老衰 第 4 位に
 高齢者におけるサルコペニアの実態について みやぐち医院 宮口信吾 我が国では 高齢化社会が進行し 脳血管疾患 悪性腫瘍の増加ばかりでなく 骨 筋肉を中心とした運動器疾患と加齢との関係が注目されている 要介護になる疾患の原因として 第 1 位は脳卒中 第 2 位は認知症 第 3 位が老衰 第 4 位に関節疾患 5 位が骨折 転倒であり 4,5 位はいずれも運動器が関係している 骨粗しょう症のメカニズムの解明
高齢者におけるサルコペニアの実態について みやぐち医院 宮口信吾 我が国では 高齢化社会が進行し 脳血管疾患 悪性腫瘍の増加ばかりでなく 骨 筋肉を中心とした運動器疾患と加齢との関係が注目されている 要介護になる疾患の原因として 第 1 位は脳卒中 第 2 位は認知症 第 3 位が老衰 第 4 位に関節疾患 5 位が骨折 転倒であり 4,5 位はいずれも運動器が関係している 骨粗しょう症のメカニズムの解明
ランニング ( 床反力 ) m / 分足足部にかかる負担部にかかる負担膝にかかる負担 運動不足解消に 久しぶりにランニングしたら膝が痛くなった そんな人にも脚全体の負担が軽い自転車で 筋力が向上するのかを調査してみました ロコモティブシンドローム という言葉をご存知ですか? 筋肉の衰えや
 m / 分足足部にかかる負担部にかかる負担膝にかかる負担 運動不足解消に 久しぶりにランニングしたら膝が痛くなった そんな人にも脚全体の負担が軽い自転車で 筋力が向上するのかを調査してみました ロコモティブシンドローム という言葉をご存知ですか? 筋肉の衰えや") 週 3 回 1 日 30 分の自転車運動で ロコモ を予防! ランニング ( 床反力 ) 2 7 0 m / 分足足部にかかる負担部にかかる負担膝にかかる負担 運動不足解消に 久しぶりにランニングしたら膝が痛くなった そんな人にも脚全体の負担が軽い自転車で 筋力が向上するのかを調査してみました ロコモティブシンドローム という言葉をご存知ですか? 筋肉の衰えや関節の障害によって 歩けなくなるかもしれない
週 3 回 1 日 30 分の自転車運動で ロコモ を予防! ランニング ( 床反力 ) 2 7 0 m / 分足足部にかかる負担部にかかる負担膝にかかる負担 運動不足解消に 久しぶりにランニングしたら膝が痛くなった そんな人にも脚全体の負担が軽い自転車で 筋力が向上するのかを調査してみました ロコモティブシンドローム という言葉をご存知ですか? 筋肉の衰えや関節の障害によって 歩けなくなるかもしれない
高齢者の椅子からの立ち上がり動作における上体の動作と下肢関節動態との関係 The relationship between upper body posture and motion and dynamics of lower extremity during sit-to-stand in eld
 高齢者の椅子からの立ち上がり動作における上体の動作と下肢関節動態との関係 The relationship between upper body posture and motion and dynamics of lower extremity during sit-to-stand in elderly person 08M40062 佐藤妙 Tae Sato 指導教員 : 丸山剛生准教授 審査員
高齢者の椅子からの立ち上がり動作における上体の動作と下肢関節動態との関係 The relationship between upper body posture and motion and dynamics of lower extremity during sit-to-stand in elderly person 08M40062 佐藤妙 Tae Sato 指導教員 : 丸山剛生准教授 審査員
Microsoft Word - 博士論文概要.docx
 [ 博士論文概要 ] 平成 25 年度 金多賢 筑波大学大学院人間総合科学研究科 感性認知脳科学専攻 1. 背景と目的映像メディアは, 情報伝達における効果的なメディアの一つでありながら, 容易に感情喚起が可能な媒体である. 誰でも簡単に映像を配信できるメディア社会への変化にともない, 見る人の状態が配慮されていない映像が氾濫することで見る人の不快な感情を生起させる問題が生じている. したがって,
[ 博士論文概要 ] 平成 25 年度 金多賢 筑波大学大学院人間総合科学研究科 感性認知脳科学専攻 1. 背景と目的映像メディアは, 情報伝達における効果的なメディアの一つでありながら, 容易に感情喚起が可能な媒体である. 誰でも簡単に映像を配信できるメディア社会への変化にともない, 見る人の状態が配慮されていない映像が氾濫することで見る人の不快な感情を生起させる問題が生じている. したがって,
...S.....\1_4.ai
 * ** ** * ** 20 10 19 61 19 31.1% 20 14 19 [ ] [ ] 13 [ ] [ ] 2007 U22 W 2008 W 114 [ ] J [ ] [ ] over use [ ] [ ] [10] [11][12][13] 19 O 61 20.4 115 1.20 18 23 19 10 10 12 22 [14] A [15] 1 PedscopeVTS120
* ** ** * ** 20 10 19 61 19 31.1% 20 14 19 [ ] [ ] 13 [ ] [ ] 2007 U22 W 2008 W 114 [ ] J [ ] [ ] over use [ ] [ ] [10] [11][12][13] 19 O 61 20.4 115 1.20 18 23 19 10 10 12 22 [14] A [15] 1 PedscopeVTS120
Chapter 1 Epidemiological Terminology
 Appendix Real examples of statistical analysis 検定 偶然を超えた差なら有意差という P
Appendix Real examples of statistical analysis 検定 偶然を超えた差なら有意差という P
連続跳躍におけるシューズ着用がリバウンドジャンプパラメータに及ぼす影響 尾上和輝 村上雅俊 仲田秀臣 The effect of Shoes Wearing on Rebound Jump Parameters in Rebound Jumping ONOUE Kazuki MURAKAMI Mas
 連続跳躍におけるシューズ着用がリバウンドジャンプパラメータに及ぼす影響 尾上和輝 村上雅俊 仲田秀臣 The effect of Shoes Wearing on Rebound Jump Parameters in Rebound Jumping ONOUE Kazuki MURAKAMI Masatoshi NAKATA Hideomi 要旨 本研究は, 大学男子陸上競技選手を対象に両足連続跳躍時のシューズ着用がリバウンドジャンプパラメータに及ぼす影響について検討した
連続跳躍におけるシューズ着用がリバウンドジャンプパラメータに及ぼす影響 尾上和輝 村上雅俊 仲田秀臣 The effect of Shoes Wearing on Rebound Jump Parameters in Rebound Jumping ONOUE Kazuki MURAKAMI Masatoshi NAKATA Hideomi 要旨 本研究は, 大学男子陸上競技選手を対象に両足連続跳躍時のシューズ着用がリバウンドジャンプパラメータに及ぼす影響について検討した
研究題目クロール泳における巧みなキック動作のメカニズム解明 松田有司 ( 大阪体育大学 ) 山田陽介 ( 京都府立医大 ) 生田泰志 ( 大阪教育大学 ) 小田伸午 ( 関西大学人間健康学部 ) 要約 本研究は 一流競泳選手と競泳未経験者のクロール泳のキック動作中の下肢の筋活動パターンの 違いを検討
 山田陽介 ( 京都府立医大 ) 生田泰志 ( 大阪教育大学 ) 小田伸午 ( 関西大学人間健康学部 ) 要約 本研究は 一流競泳選手と競泳未経験者のクロール泳のキック動作中の下肢の筋活動パターンの 違いを検討") 研究題目クロール泳における巧みなキック動作のメカニズム解明 研究代表者名松田有司 目 次 要約 1 諸言 2 方法 3 結果 6 考察 11 謝辞 12 参考文献 12 研究題目クロール泳における巧みなキック動作のメカニズム解明 松田有司 ( 大阪体育大学 ) 山田陽介 ( 京都府立医大 ) 生田泰志 ( 大阪教育大学 ) 小田伸午 ( 関西大学人間健康学部 ) 要約 本研究は 一流競泳選手と競泳未経験者のクロール泳のキック動作中の下肢の筋活動パターンの
研究題目クロール泳における巧みなキック動作のメカニズム解明 研究代表者名松田有司 目 次 要約 1 諸言 2 方法 3 結果 6 考察 11 謝辞 12 参考文献 12 研究題目クロール泳における巧みなキック動作のメカニズム解明 松田有司 ( 大阪体育大学 ) 山田陽介 ( 京都府立医大 ) 生田泰志 ( 大阪教育大学 ) 小田伸午 ( 関西大学人間健康学部 ) 要約 本研究は 一流競泳選手と競泳未経験者のクロール泳のキック動作中の下肢の筋活動パターンの
Effects of developed state of thigh muscles on the knee joint dynamics during side cutting The purpose of this study was to investigate the effects of
 大腿筋群の発達状態がサイドカッティングにおける 膝関節動態に及ぼす影響 Effects of developed state of thigh muscles on the knee joint dynamics during side cutting 12M40217 馮超然 Feng Chaoran 指導教員 : 丸山剛生准教授 審査員 : 林直亨教授 須田和裕教授 本研究では 大腿四頭筋および大腿二頭筋の発達状態がサイドカッティング動作における膝関節動態に及ぼす影響を明らかにすることを目的とした
大腿筋群の発達状態がサイドカッティングにおける 膝関節動態に及ぼす影響 Effects of developed state of thigh muscles on the knee joint dynamics during side cutting 12M40217 馮超然 Feng Chaoran 指導教員 : 丸山剛生准教授 審査員 : 林直亨教授 須田和裕教授 本研究では 大腿四頭筋および大腿二頭筋の発達状態がサイドカッティング動作における膝関節動態に及ぼす影響を明らかにすることを目的とした
 測定した また Scrは酵素法にて測定し その参考基 r =0.575 p
測定した また Scrは酵素法にて測定し その参考基 r =0.575 p JUSE-StatWorks/V5 活用ガイドブック
 4.6 薄膜金属材料の表面加工 ( 直積法 ) 直積法では, 内側に直交配列表または要因配置計画の M 個の実験, 外側に直交配列表または要因配置計画の N 個の実験をわりつけ, その組み合わせの M N のデータを解析します. 直積法を用いることにより, 内側計画の各列と全ての外側因子との交互作用を求めることができます. よって, 環境条件や使用条件のように制御が難しい ( 水準を指定できない )
4.6 薄膜金属材料の表面加工 ( 直積法 ) 直積法では, 内側に直交配列表または要因配置計画の M 個の実験, 外側に直交配列表または要因配置計画の N 個の実験をわりつけ, その組み合わせの M N のデータを解析します. 直積法を用いることにより, 内側計画の各列と全ての外側因子との交互作用を求めることができます. よって, 環境条件や使用条件のように制御が難しい ( 水準を指定できない )
身体福祉論
 貯筋のすすめ 福永哲夫早稲田大学スポーツ科学学術院 2008 年度スポーツ科学研究センターシンポジウム メタボリックシンドロームをいかに予防するか 保健指導における運動の理論と実践 スポーツ科学研究, 6, 50-54, 2009 年, 受付日 :2009 年 5 月 22 日, 受理日 :2009 年 5 月 22 日 日常生活においては, 椅子から立ち上がる, 歩くなど様々な身体運動がなされる.
貯筋のすすめ 福永哲夫早稲田大学スポーツ科学学術院 2008 年度スポーツ科学研究センターシンポジウム メタボリックシンドロームをいかに予防するか 保健指導における運動の理論と実践 スポーツ科学研究, 6, 50-54, 2009 年, 受付日 :2009 年 5 月 22 日, 受理日 :2009 年 5 月 22 日 日常生活においては, 椅子から立ち上がる, 歩くなど様々な身体運動がなされる.
博士論文 一流 110m ハードル走選手のインターバル走およびハードリング動作に関する バイオメカニクス的研究 平成 26 年度 筑波大学大学院人間総合科学研究科体育科学専攻 柴山一仁
 博士論文 一流 110m ハードル走選手のインターバル走およびハードリング動作に関する バイオメカニクス的研究 平成 26 年度 筑波大学大学院人間総合科学研究科体育科学専攻 柴山一仁 目次 博士論文に関連する業績一覧 表のタイトル一覧 図のタイトル一覧 ⅵ ⅷ ⅸ 第 1 章 緒言 1 1.1 研究の背景 1 1.1.1 ハードル走について 1 1.1.2 日本における 110mH 走の現状と課題
博士論文 一流 110m ハードル走選手のインターバル走およびハードリング動作に関する バイオメカニクス的研究 平成 26 年度 筑波大学大学院人間総合科学研究科体育科学専攻 柴山一仁 目次 博士論文に関連する業績一覧 表のタイトル一覧 図のタイトル一覧 ⅵ ⅷ ⅸ 第 1 章 緒言 1 1.1 研究の背景 1 1.1.1 ハードル走について 1 1.1.2 日本における 110mH 走の現状と課題
Microsoft PowerPoint - 口頭発表_折り畳み自転車
 1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
研究論文 筋電図及び筋音図からみた上腕屈筋群及び大腿四頭筋群における漸増的筋力発揮 Muscle activation patterns of Electromyogram and mechanomyogram, during maximal voluntary contraction in elb
 研究論文 筋電図及び筋音図からみた上腕屈筋群及び大腿四頭筋群における漸増的筋力発揮 Muscle activation patterns of Electromyogram and mechanomyogram, during maximal voluntary contraction in elbow flexor and knee extensor muscles 抄録 24 MVC MVC MVC
研究論文 筋電図及び筋音図からみた上腕屈筋群及び大腿四頭筋群における漸増的筋力発揮 Muscle activation patterns of Electromyogram and mechanomyogram, during maximal voluntary contraction in elbow flexor and knee extensor muscles 抄録 24 MVC MVC MVC
第 4 週コンボリューションその 2, 正弦波による分解 教科書 p. 16~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問 1. 以下の図にならって,1 と 2 の δ 関数を図示せよ δ (t) 2
 2") 第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
<4D F736F F F696E74202D B835E89F090CD89898F4B81408F6489F18B4195AA90CD A E707074>
 重回帰分析 (2) データ解析演習 6.9 M1 荻原祐二 1 発表の流れ 1. 復習 2. ダミー変数を用いた重回帰分析 3. 交互作用項を用いた重回帰分析 4. 実際のデータで演習 2 復習 他の独立変数の影響を取り除いた時に ある独立変数が従属変数をどれくらい予測できるか 変数 X1 変数 X2 β= 変数 Y 想定したモデルが全体としてどの程度当てはまるのか R²= 3 偏相関係数と標準化偏回帰係数の違い
重回帰分析 (2) データ解析演習 6.9 M1 荻原祐二 1 発表の流れ 1. 復習 2. ダミー変数を用いた重回帰分析 3. 交互作用項を用いた重回帰分析 4. 実際のデータで演習 2 復習 他の独立変数の影響を取り除いた時に ある独立変数が従属変数をどれくらい予測できるか 変数 X1 変数 X2 β= 変数 Y 想定したモデルが全体としてどの程度当てはまるのか R²= 3 偏相関係数と標準化偏回帰係数の違い
Microsoft Word doc
 股関節および膝関節角度が等尺性膝関節伸展トルクと大腿四頭筋の筋活動に与える影響 Influence of hip and knee joint angles on knee extension torque and quadriceps femoris electromyographic activities during isometric contraction 江間諒一 1), 若原卓 2),
股関節および膝関節角度が等尺性膝関節伸展トルクと大腿四頭筋の筋活動に与える影響 Influence of hip and knee joint angles on knee extension torque and quadriceps femoris electromyographic activities during isometric contraction 江間諒一 1), 若原卓 2),
共同研究目次.indd
 Ⅱ 視覚障害児のための図形模写評価システムの開発 1. はじめに 視覚障害児の教育において 図形模写の技能が形状を学ぶ基礎学習として重要であり 児童は触図で示された手本 ( サンプル図 ) の図形をレーズライターで模写して形状を学習している こうした模写図形がどれだけ正確に描かれているかという評価は 現状では 指導者の主観に委ねられている このような評価では 自分の模写した図形の大きさがサンプル図と比較して大きいのか小さいのか
Ⅱ 視覚障害児のための図形模写評価システムの開発 1. はじめに 視覚障害児の教育において 図形模写の技能が形状を学ぶ基礎学習として重要であり 児童は触図で示された手本 ( サンプル図 ) の図形をレーズライターで模写して形状を学習している こうした模写図形がどれだけ正確に描かれているかという評価は 現状では 指導者の主観に委ねられている このような評価では 自分の模写した図形の大きさがサンプル図と比較して大きいのか小さいのか
COP (1 COP 2 3 (2 COP ± ±7.4cm 62.9±8.9kg 7m 3 Fig cm ±0cm -13cm Fig. 1 Gait condition
 A method for evaluating the effects of leg motion on center of foot pressure during walking 06M40191 Hiroki WATANABE COP : Center Of Pressure COP COP 11 +13cm 0cm -13cm 7m 44 9 2 3 COP COM COM : Center
A method for evaluating the effects of leg motion on center of foot pressure during walking 06M40191 Hiroki WATANABE COP : Center Of Pressure COP COP 11 +13cm 0cm -13cm 7m 44 9 2 3 COP COM COM : Center
Microsoft PowerPoint - e-stat(OLS).pptx
.pptx") 経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
ができるようになったソフトによって あらためて解析し直しました (2) これらの有効詳細フォームにおける 全重心の水平速度が最大値をとるところ を パワ ポジション ( キックポイント ) と見なしました (3) それらの脛角 (θs) と太もも角 (θt) をプログラムソフトによって求め これを図
 これらの有効詳細フォームにおける 全重心の水平速度が最大値をとるところ を パワ ポジション ( キックポイント ) と見なしました (3) それらの脛角 (θs) と太もも角 (θt) をプログラムソフトによって求め これを図") 短距離ランニングフォーム解析 (17) FK 選手の 100m と 200m のパワーポジションによるランニングフォーム分類 黒月樹人 (KULOTSUKI Kinohito @ 9621 ANALYSIS) パワーポジションによるランニングフォーム分類 スプリントランニングフォームの分類 というページで キック局面のパワーポジション位置のフォームについて 脛の立位角 (θs) と太ももの立位角 (θt)
短距離ランニングフォーム解析 (17) FK 選手の 100m と 200m のパワーポジションによるランニングフォーム分類 黒月樹人 (KULOTSUKI Kinohito @ 9621 ANALYSIS) パワーポジションによるランニングフォーム分類 スプリントランニングフォームの分類 というページで キック局面のパワーポジション位置のフォームについて 脛の立位角 (θs) と太ももの立位角 (θt)
Microsoft PowerPoint - R-stat-intro_12.ppt [互換モード]
![Microsoft PowerPoint - R-stat-intro_12.ppt [互換モード]](/thumbs/101/151921093.jpg "Microsoft PowerPoint - R-stat-intro_12.ppt [互換モード]") R で統計解析入門 (12) 生存時間解析 中篇 準備 : データ DEP の読み込み 1. データ DEP を以下からダウンロードする http://www.cwk.zaq.ne.jp/fkhud708/files/dep.csv /fkh /d 2. ダウンロードした場所を把握する ここでは c:/temp とする 3. R を起動し,2. 2 の場所に移動し, データを読み込む 4. データ
R で統計解析入門 (12) 生存時間解析 中篇 準備 : データ DEP の読み込み 1. データ DEP を以下からダウンロードする http://www.cwk.zaq.ne.jp/fkhud708/files/dep.csv /fkh /d 2. ダウンロードした場所を把握する ここでは c:/temp とする 3. R を起動し,2. 2 の場所に移動し, データを読み込む 4. データ
平成 28,29 年度スポーツ庁委託事業女性アスリートの育成 支援プロジェクト 女性アスリートの戦略的強化に向けた調査研究 女性アスリートにおける 競技力向上要因としての 体格変化と内分泌変化の検討 女性アスリートの育成 強化の現場で活用していただくために 2016 年に開催されたリオデジャネイロ
 平成 28,29 年度スポーツ庁委託事業女性アスリートの育成 支援プロジェクト 女性アスリートの戦略的強化に向けた調査研究 女性アスリートにおける 競技力向上要因としての 体格変化と内分泌変化の検討 女性アスリートの育成 強化の現場で活用していただくために 16 年に開催されたリオデジャネイロ オリンピックで 日本は 41 個のメダルを獲得しました その内訳は 女子が 7 競技 18 種目 男子が
平成 28,29 年度スポーツ庁委託事業女性アスリートの育成 支援プロジェクト 女性アスリートの戦略的強化に向けた調査研究 女性アスリートにおける 競技力向上要因としての 体格変化と内分泌変化の検討 女性アスリートの育成 強化の現場で活用していただくために 16 年に開催されたリオデジャネイロ オリンピックで 日本は 41 個のメダルを獲得しました その内訳は 女子が 7 競技 18 種目 男子が
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
Microsoft Word doc
 原著論文 原著論文 アテネオリンピックに向けての 走りの改革 の取り組み Development of running techniques making approach to Olympic game in Athens 土江寛裕 Hiroyasu Tsuchie 富士通 陸上競技部, 早稲田大学大学院人間科学研究科 Graduate School of Human Sciences, Waseda
原著論文 原著論文 アテネオリンピックに向けての 走りの改革 の取り組み Development of running techniques making approach to Olympic game in Athens 土江寛裕 Hiroyasu Tsuchie 富士通 陸上競技部, 早稲田大学大学院人間科学研究科 Graduate School of Human Sciences, Waseda
た 観衆効果は技能レベルによって作用が異なっ 計測をした た 平均レベル以下の選手は観衆がいると成績が 下がったが, 平均以上の選手は観衆に見られると成績が上がった 興味深いことに, 観衆効果は観衆の数に比例してその効果を増すようである ネビルとキャン (Nevill and Cann, 1998)
") 観衆効果が競技パフォーマンスに与える影響 1170419 口羽雄吾高知工科大学マネジメント学部 1. 序論自分ではない他者が傍らに存在することで, 作るという つまり, 十分な学習がなされている場合 業の効率が上がる, または下がる このような経験はないだろうか 心理学では, 他者の存在によって作業効率やパフォーマンスが高まることを社会的促進, 逆に他者の存在によって作業効率やパフォーマンスが低下することを社会的抑制という
観衆効果が競技パフォーマンスに与える影響 1170419 口羽雄吾高知工科大学マネジメント学部 1. 序論自分ではない他者が傍らに存在することで, 作るという つまり, 十分な学習がなされている場合 業の効率が上がる, または下がる このような経験はないだろうか 心理学では, 他者の存在によって作業効率やパフォーマンスが高まることを社会的促進, 逆に他者の存在によって作業効率やパフォーマンスが低下することを社会的抑制という
内 容 目 次
 二カ所をホチキスで止めて 黒 又は白の製本テープを裏表紙まで貼る 平成 25 年度岡山大学大学院保健学研究科博士学位申請論文 内容要旨 放射線技術科学分野黒田昌宏教授指導 734216 播本隆平成 25 年 6 月提出 1 内容目次 主論文 Influence of permittivity and electrical conductivity on image pattern of MRI (
二カ所をホチキスで止めて 黒 又は白の製本テープを裏表紙まで貼る 平成 25 年度岡山大学大学院保健学研究科博士学位申請論文 内容要旨 放射線技術科学分野黒田昌宏教授指導 734216 播本隆平成 25 年 6 月提出 1 内容目次 主論文 Influence of permittivity and electrical conductivity on image pattern of MRI (
4 身体活動量カロリズム内に記憶されているデータを表計算ソフトに入力し, 身体活動量の分析を行った 身体活動量の測定結果から, 連続した 7 日間の平均, 学校に通っている平日平均, 学校が休みである土日平均について, 総エネルギー消費量, 活動エネルギー量, 歩数, エクササイズ量から分析を行った
 ダウン症児童生徒の肥満予防に関する基礎的検討 ~ 身体活動量の測定をとおして ~ 学校教育専攻学校教育専修修教 09-003 伊藤由紀子 Ⅰ 研究の目的近年, 生活習慣の変化に伴い小児肥満も増加傾向を示し, 小児肥満の 70~80% は成人期に移行するとされ, 肥満は生活習慣病を引き起こす要因のひとつであるとされている したがって, 早期からの肥満予防支援の必要性が強く求められており, 現在では幼児期からの取り組みが有効であると認識されてきている
ダウン症児童生徒の肥満予防に関する基礎的検討 ~ 身体活動量の測定をとおして ~ 学校教育専攻学校教育専修修教 09-003 伊藤由紀子 Ⅰ 研究の目的近年, 生活習慣の変化に伴い小児肥満も増加傾向を示し, 小児肥満の 70~80% は成人期に移行するとされ, 肥満は生活習慣病を引き起こす要因のひとつであるとされている したがって, 早期からの肥満予防支援の必要性が強く求められており, 現在では幼児期からの取り組みが有効であると認識されてきている
Gatlin(8) 図 1 ガトリン選手のランニングフォーム Gatlin(7) 解析の特殊な事情このビデオ画像からフレームごとの静止画像を取り出して保存してあるハードディスクから 今回解析するための小画像を切り出し ランニングフォーム解析ソフト runa.exe に取り込んで 座標を読み込み この
 図 1 ガトリン選手のランニングフォーム Gatlin(7) 解析の特殊な事情このビデオ画像からフレームごとの静止画像を取り出して保存してあるハードディスクから 今回解析するための小画像を切り出し ランニングフォーム解析ソフト runa.exe に取り込んで 座標を読み込み この") 短距離ランニングフォーム解析 (20) 2005 年ガトリン選手の詳細重心解析 黒月樹人 (KULOTSUKI Kinohito @ 9621 ANALYSIS) 2005 年 9 月のガトリン選手 2005 年の 9 月に日本で行われた 100m レースにガトリン選手は出場しています 記録は 10 秒 2 くらいだったでしょうか もちろん優勝しています このときのレースがテレビ放映されたので その画面をビデオで撮影しました
短距離ランニングフォーム解析 (20) 2005 年ガトリン選手の詳細重心解析 黒月樹人 (KULOTSUKI Kinohito @ 9621 ANALYSIS) 2005 年 9 月のガトリン選手 2005 年の 9 月に日本で行われた 100m レースにガトリン選手は出場しています 記録は 10 秒 2 くらいだったでしょうか もちろん優勝しています このときのレースがテレビ放映されたので その画面をビデオで撮影しました
統計的データ解析
 統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
青焼 1章[15-52].indd
![青焼 1章[15-52].indd](/thumbs/86/94313777.jpg "青焼 1章[15-52].indd") 1 第 1 章統計の基礎知識 1 1 なぜ統計解析が必要なのか? 人間は自分自身の経験にもとづいて 感覚的にものごとを判断しがちである 例えばある疾患に対する標準治療薬の有効率が 50% であったとする そこに新薬が登場し ある医師がその新薬を 5 人の患者に使ったところ 4 人が有効と判定されたとしたら 多くの医師はこれまでの標準治療薬よりも新薬のほうが有効性が高そうだと感じることだろう しかし
1 第 1 章統計の基礎知識 1 1 なぜ統計解析が必要なのか? 人間は自分自身の経験にもとづいて 感覚的にものごとを判断しがちである 例えばある疾患に対する標準治療薬の有効率が 50% であったとする そこに新薬が登場し ある医師がその新薬を 5 人の患者に使ったところ 4 人が有効と判定されたとしたら 多くの医師はこれまでの標準治療薬よりも新薬のほうが有効性が高そうだと感じることだろう しかし
1. 多変量解析の基本的な概念 1. 多変量解析の基本的な概念 1.1 多変量解析の目的 人間のデータは多変量データが多いので多変量解析が有用 特性概括評価特性概括評価 症 例 主 治 医 の 主 観 症 例 主 治 医 の 主 観 単変量解析 客観的規準のある要約多変量解析 要約値 客観的規準のな
 1.1 多変量解析の目的 人間のデータは多変量データが多いので多変量解析が有用 特性概括評価特性概括評価 症 例 治 医 の 観 症 例 治 医 の 観 単変量解析 客観的規準のある要約多変量解析 要約値 客観的規準のない要約知識 直感 知識 直感 総合的評価 考察 総合的評価 考察 単変量解析の場合 多変量解析の場合 < 表 1.1 脂質異常症患者の TC と TG と重症度 > 症例 No. TC
1.1 多変量解析の目的 人間のデータは多変量データが多いので多変量解析が有用 特性概括評価特性概括評価 症 例 治 医 の 観 症 例 治 医 の 観 単変量解析 客観的規準のある要約多変量解析 要約値 客観的規準のない要約知識 直感 知識 直感 総合的評価 考察 総合的評価 考察 単変量解析の場合 多変量解析の場合 < 表 1.1 脂質異常症患者の TC と TG と重症度 > 症例 No. TC
Vol9内表紙.indd
 23 原著論文 Utility of the S-scale of perceived exertion for resistance exercise and training 中谷敏昭 1) 1) 2) 3) 寺田和史 上英俊 塩見玲子 1) 白石晃 灘本雅一 Toshiaki NAKATANI 1), Kazufumi TERADA 1), Hidetoshi UE 2), Reiko SHIOMI
23 原著論文 Utility of the S-scale of perceived exertion for resistance exercise and training 中谷敏昭 1) 1) 2) 3) 寺田和史 上英俊 塩見玲子 1) 白石晃 灘本雅一 Toshiaki NAKATANI 1), Kazufumi TERADA 1), Hidetoshi UE 2), Reiko SHIOMI
周期時系列の統計解析 (3) 移動平均とフーリエ変換 nino 2017 年 12 月 18 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ( ノイズ ) の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分の振幅
 移動平均とフーリエ変換 nino 2017 年 12 月 18 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ( ノイズ ) の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分の振幅") 周期時系列の統計解析 3 移動平均とフーリエ変換 io 07 年 月 8 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ノイズ の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分のがどのように変化するのか等について検討する. また, 気温の実測値に移動平均を適用した結果についてフーリエ変換も併用して考察する. 単純移動平均の計算式移動平均には,
周期時系列の統計解析 3 移動平均とフーリエ変換 io 07 年 月 8 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ノイズ の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分のがどのように変化するのか等について検討する. また, 気温の実測値に移動平均を適用した結果についてフーリエ変換も併用して考察する. 単純移動平均の計算式移動平均には,
画像類似度測定の初歩的な手法の検証
 画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
Microsoft Word docx
 立位にて足関節底屈位を保持した際の荷重位置が下腿筋活動に及ぼす影響 Influence of the position of weight-bearing on activities of calf muscles while holding the plantar flexion at the ankle joint in standing position 石田弘 1), 安村拓人 2), 矢部慎太郎
立位にて足関節底屈位を保持した際の荷重位置が下腿筋活動に及ぼす影響 Influence of the position of weight-bearing on activities of calf muscles while holding the plantar flexion at the ankle joint in standing position 石田弘 1), 安村拓人 2), 矢部慎太郎
異文化言語教育評価論 ⅠA 第 4 章分散分析 (3 グループ以上の平均を比較する ) 平成 26 年 5 月 14 日 報告者 :D.M. K.S. 4-1 分散分析とは 検定の多重性 t 検定 2 群の平均値を比較する場合の手法分散分析 3 群以上の平均を比較する場合の手法 t 検定
 平成 26 年 5 月 14 日 報告者 :D.M. K.S. 4-1 分散分析とは 検定の多重性 t 検定 2 群の平均値を比較する場合の手法分散分析 3 群以上の平均を比較する場合の手法 t 検定") 異文化言語教育評価論 ⅠA 第 4 章分散分析 (3 グループ以上の平均を比較する ) 平成 26 年 5 月 14 日 報告者 :D.M. K.S. 4-1 分散分析とは 4-1-1 検定の多重性 t 検定 2 群の平均値を比較する場合の手法分散分析 3 群以上の平均を比較する場合の手法 t 検定の反復 (e.g., A, B, C の 3 群の比較を A-B 間 B-C 間 A-C 間の t 検定で行う
異文化言語教育評価論 ⅠA 第 4 章分散分析 (3 グループ以上の平均を比較する ) 平成 26 年 5 月 14 日 報告者 :D.M. K.S. 4-1 分散分析とは 4-1-1 検定の多重性 t 検定 2 群の平均値を比較する場合の手法分散分析 3 群以上の平均を比較する場合の手法 t 検定の反復 (e.g., A, B, C の 3 群の比較を A-B 間 B-C 間 A-C 間の t 検定で行う
榎本靖士 ( 京都教育大学 ) 岡崎和伸 ( 大阪市立大学 ) 岡田英孝 ( 電気通信大学 ) 渋谷俊浩 ( びわこ成蹊スポーツ大学 ) 杉田正明 ( 三重大学 ) 高橋英幸 ( 国立スポーツ科学センター ) 高松潤二 ( 国立スポーツ科学センター ) 前川剛輝 ( 国立スポーツ科学センター ) ケ
 岡崎和伸 ( 大阪市立大学 ) 岡田英孝 ( 電気通信大学 ) 渋谷俊浩 ( びわこ成蹊スポーツ大学 ) 杉田正明 ( 三重大学 ) 高橋英幸 ( 国立スポーツ科学センター ) 高松潤二 ( 国立スポーツ科学センター ) 前川剛輝 ( 国立スポーツ科学センター ) ケ") ケニア人長距離選手の生理学的 バイオメカニクス的特徴の究明 ~ 日本人長距離選手の強化方策を探る ~ 榎本靖士 目 次 要約 1 緒言 2 方法 3 結果 6 考察 17 摘要 21 榎本靖士 ( 京都教育大学 ) 岡崎和伸 ( 大阪市立大学 ) 岡田英孝 ( 電気通信大学 ) 渋谷俊浩 ( びわこ成蹊スポーツ大学 ) 杉田正明 ( 三重大学 ) 高橋英幸 ( 国立スポーツ科学センター ) 高松潤二
ケニア人長距離選手の生理学的 バイオメカニクス的特徴の究明 ~ 日本人長距離選手の強化方策を探る ~ 榎本靖士 目 次 要約 1 緒言 2 方法 3 結果 6 考察 17 摘要 21 榎本靖士 ( 京都教育大学 ) 岡崎和伸 ( 大阪市立大学 ) 岡田英孝 ( 電気通信大学 ) 渋谷俊浩 ( びわこ成蹊スポーツ大学 ) 杉田正明 ( 三重大学 ) 高橋英幸 ( 国立スポーツ科学センター ) 高松潤二
PowerPoint プレゼンテーション
 1/X Chapter 9: Linear correlation Cohen, B. H. (2007). In B. H. Cohen (Ed.), Explaining Psychological Statistics (3rd ed.) (pp. 255-285). NJ: Wiley. 概要 2/X 相関係数とは何か 相関係数の数式 検定 注意点 フィッシャーのZ 変換 信頼区間 相関係数の差の検定
1/X Chapter 9: Linear correlation Cohen, B. H. (2007). In B. H. Cohen (Ed.), Explaining Psychological Statistics (3rd ed.) (pp. 255-285). NJ: Wiley. 概要 2/X 相関係数とは何か 相関係数の数式 検定 注意点 フィッシャーのZ 変換 信頼区間 相関係数の差の検定
簿記教育における習熟度別クラス編成 簿記教育における習熟度別クラス編成 濱田峰子 要旨 近年 学生の多様化に伴い きめ細やかな個別対応や対話型授業が可能な少人数の習熟度別クラス編成の重要性が増している そのため 本学では入学時にプレイスメントテストを実施し 国語 数学 英語の 3 教科については習熟
 濱田峰子 要旨 近年 学生の多様化に伴い きめ細やかな個別対応や対話型授業が可能な少人数の習熟度別クラス編成の重要性が増している そのため 本学では入学時にプレイスメントテストを実施し 国語 数学 英語の 3 教科については習熟度別クラス編成を実施している 本稿では さらにの導入へ向けて 既存のプレイスメントテストを活用したクラス編成の可能性について検討した 3 教科に関するプレイスメントテストの偏差値を説明変数
濱田峰子 要旨 近年 学生の多様化に伴い きめ細やかな個別対応や対話型授業が可能な少人数の習熟度別クラス編成の重要性が増している そのため 本学では入学時にプレイスメントテストを実施し 国語 数学 英語の 3 教科については習熟度別クラス編成を実施している 本稿では さらにの導入へ向けて 既存のプレイスメントテストを活用したクラス編成の可能性について検討した 3 教科に関するプレイスメントテストの偏差値を説明変数
参考1中酪(H23.11)
") - 1- 参考 1 - 2- - 3- - 4- - 5- - 6- - 7- - 8- 別添 1 牛乳の比重増加要因の解析 国立大学法人帯広畜産大学畜産フィールド科学センター准教授木田克弥 背景 乳および乳製品の成分規格等に関する省令 ( 乳等省令 ) において 生乳の比重は 1.28-1.34 に規定されている 一方 乳牛の遺伝的改良 ( 乳量および乳成分率の向上 ) に成果として 昨今の生乳の比重は増加傾向にあり
- 1- 参考 1 - 2- - 3- - 4- - 5- - 6- - 7- - 8- 別添 1 牛乳の比重増加要因の解析 国立大学法人帯広畜産大学畜産フィールド科学センター准教授木田克弥 背景 乳および乳製品の成分規格等に関する省令 ( 乳等省令 ) において 生乳の比重は 1.28-1.34 に規定されている 一方 乳牛の遺伝的改良 ( 乳量および乳成分率の向上 ) に成果として 昨今の生乳の比重は増加傾向にあり
13章 回帰分析
 単回帰分析 つ以上の変数についての関係を見る つの 目的 被説明 変数を その他の 説明 変数を使って 予測しようというものである 因果関係とは限らない ここで勉強すること 最小 乗法と回帰直線 決定係数とは何か? 最小 乗法と回帰直線 これまで 変数の間の関係の深さについて考えてきた 相関係数 ここでは 変数に役割を与え 一方の 説明 変数を用いて他方の 目的 被説明 変数を説明することを考える
単回帰分析 つ以上の変数についての関係を見る つの 目的 被説明 変数を その他の 説明 変数を使って 予測しようというものである 因果関係とは限らない ここで勉強すること 最小 乗法と回帰直線 決定係数とは何か? 最小 乗法と回帰直線 これまで 変数の間の関係の深さについて考えてきた 相関係数 ここでは 変数に役割を与え 一方の 説明 変数を用いて他方の 目的 被説明 変数を説明することを考える
 =~B s -m~ま 土 -m~ま 土 m/s -m は 土 % -m~まð 率 ~ /sc 変 化 率 ~ 化 率 ~ 変 化 率 ~ t t t t 跳 躍 高 (cm 表 跳躍能力および跳躍能力決定要因 Pr Post 変化率(覧 s- t s- t 跳 躍 高 (cm R J s- t D J 指数* s t 指数 t t 土 t 士 t
=~B s -m~ま 土 -m~ま 土 m/s -m は 土 % -m~まð 率 ~ /sc 変 化 率 ~ 化 率 ~ 変 化 率 ~ t t t t 跳 躍 高 (cm 表 跳躍能力および跳躍能力決定要因 Pr Post 変化率(覧 s- t s- t 跳 躍 高 (cm R J s- t D J 指数* s t 指数 t t 土 t 士 t
ロペラミド塩酸塩カプセル 1mg TCK の生物学的同等性試験 バイオアベイラビリティの比較 辰巳化学株式会社 はじめにロペラミド塩酸塩は 腸管に選択的に作用して 腸管蠕動運動を抑制し また腸管内の水分 電解質の分泌を抑制して吸収を促進することにより下痢症に効果を示す止瀉剤である ロペミン カプセル
 ロペラミド塩酸塩カプセル 1mg TCK の生物学的同等性試験 バイオアベイラビリティの比較 辰巳化学株式会社 はじめにロペラミド塩酸塩は 腸管に選択的に作用して 腸管蠕動運動を抑制し また腸管内の水分 電解質の分泌を抑制して吸収を促進することにより下痢症に効果を示す止瀉剤である ロペミン カプセル 1mg は 1 カプセル中ロペラミド塩酸塩 1 mg を含有し消化管から吸収されて作用を発現する このことから
ロペラミド塩酸塩カプセル 1mg TCK の生物学的同等性試験 バイオアベイラビリティの比較 辰巳化学株式会社 はじめにロペラミド塩酸塩は 腸管に選択的に作用して 腸管蠕動運動を抑制し また腸管内の水分 電解質の分泌を抑制して吸収を促進することにより下痢症に効果を示す止瀉剤である ロペミン カプセル 1mg は 1 カプセル中ロペラミド塩酸塩 1 mg を含有し消化管から吸収されて作用を発現する このことから
行為システムとしての 歩行を治療する 認知神経リハビリテーションの観点
 行為システムとしての歩行を治療する認知神経リハビリテーションの観点 人間はなぜ歩くのか? NPO 法人子どもの発達 学習を支援するリハビリテーション研究所理事長高橋昭彦 アフリカで誕生した我々の祖先は長い月日をかけて世界中に渡っていった 最先端のリハビリテーション? 我々が回復を目指すべきものは 歩行動作か行為としての歩行システムか? 人間は外部刺激によって制御される 操り人形 ではない! この問題に答えられない患者に
行為システムとしての歩行を治療する認知神経リハビリテーションの観点 人間はなぜ歩くのか? NPO 法人子どもの発達 学習を支援するリハビリテーション研究所理事長高橋昭彦 アフリカで誕生した我々の祖先は長い月日をかけて世界中に渡っていった 最先端のリハビリテーション? 我々が回復を目指すべきものは 歩行動作か行為としての歩行システムか? 人間は外部刺激によって制御される 操り人形 ではない! この問題に答えられない患者に
学位論文の内容の要旨 論文提出者氏名 八木茂典 論文審査担当者 主査 副査 大川淳 秋田恵一 森田定雄 論文題目 Incidence and risk factors for medial tibial stress syndrome and tibial stress fracture in hi
 学位論文の内容の要旨 論文提出者氏名 八木茂典 論文審査担当者 主査 副査 大川淳 秋田恵一 森田定雄 論文題目 Incidence and risk factors for medial tibial stress syndrome and tibial stress fracture in high school runners ( 論文内容の要旨 ) 要旨目的ランナーにおけるシンスプリントと脛骨疲労骨折は発生頻度の高いスポーツ障害である
学位論文の内容の要旨 論文提出者氏名 八木茂典 論文審査担当者 主査 副査 大川淳 秋田恵一 森田定雄 論文題目 Incidence and risk factors for medial tibial stress syndrome and tibial stress fracture in high school runners ( 論文内容の要旨 ) 要旨目的ランナーにおけるシンスプリントと脛骨疲労骨折は発生頻度の高いスポーツ障害である
PowerPoint プレゼンテーション
 PID 制御の基礎 ON/OFF 制御 PID 制御 P 制御 過渡特性を改善しよう PD 制御と P-D 制御 定常特性を改善しよう PI-D 制御 4.2 節 I-PD 制御 角度制御実験装置 0 [deg] 30 [deg] 角度制御実験装置 目標値 コントローラ ( マイコン ) アクチュエータ (DC モータ ) 制御対象 ( アーム ) 角度 センサ ( ロータリエンコーダ ) ON/OFF
PID 制御の基礎 ON/OFF 制御 PID 制御 P 制御 過渡特性を改善しよう PD 制御と P-D 制御 定常特性を改善しよう PI-D 制御 4.2 節 I-PD 制御 角度制御実験装置 0 [deg] 30 [deg] 角度制御実験装置 目標値 コントローラ ( マイコン ) アクチュエータ (DC モータ ) 制御対象 ( アーム ) 角度 センサ ( ロータリエンコーダ ) ON/OFF
Medical3
 Chapter 1 1.4.1 1 元配置分散分析と多重比較の実行 3つの治療法による測定値に有意な差が認められるかどうかを分散分析で調べます この例では 因子が1つだけ含まれるため1 元配置分散分析 one-way ANOVA の適用になります また 多重比較法 multiple comparison procedure を用いて 具体的のどの治療法の間に有意差が認められるかを検定します 1. 分析メニュー
Chapter 1 1.4.1 1 元配置分散分析と多重比較の実行 3つの治療法による測定値に有意な差が認められるかどうかを分散分析で調べます この例では 因子が1つだけ含まれるため1 元配置分散分析 one-way ANOVA の適用になります また 多重比較法 multiple comparison procedure を用いて 具体的のどの治療法の間に有意差が認められるかを検定します 1. 分析メニュー
周波数特性解析
 周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
RMS(Root Mean Square value 実効値 ) 実効値は AC の電圧と電流両方の値を規定する 最も一般的で便利な値です AC 波形の実効値はその波形から得られる パワーのレベルを示すものであり AC 信号の最も重要な属性となります 実効値の計算は AC の電流波形と それによって
 実効値は AC の電圧と電流両方の値を規定する 最も一般的で便利な値です AC 波形の実効値はその波形から得られる パワーのレベルを示すものであり AC 信号の最も重要な属性となります 実効値の計算は AC の電流波形と それによって") 入門書 最近の数多くの AC 電源アプリケーションに伴う複雑な電流 / 電圧波形のため さまざまな測定上の課題が発生しています このような問題に対処する場合 基本的な測定 使用される用語 それらの関係について理解することが重要になります このアプリケーションノートではパワー測定の基本的な考え方やパワー測定において重要な 以下の用語の明確に定義します RMS(Root Mean Square value
入門書 最近の数多くの AC 電源アプリケーションに伴う複雑な電流 / 電圧波形のため さまざまな測定上の課題が発生しています このような問題に対処する場合 基本的な測定 使用される用語 それらの関係について理解することが重要になります このアプリケーションノートではパワー測定の基本的な考え方やパワー測定において重要な 以下の用語の明確に定義します RMS(Root Mean Square value
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
Microsoft Word - MEsymp2006-1c.doc
 片麻痺者の歩行遊脚期の cycle-to-cycle 制御に基づく FES 制御法 : 床反力を考慮したモデルシミュレーション 柴田聡 渡邉高志, Achmad Arifin 吉澤誠 星宮望 東北大学大学院工学研究科, 仙台市青葉区荒巻字青葉 6-6- 東北大学情報シナジーセンター, 仙台市青葉区荒巻字青葉 6-6- Institute of Technoloy "Sepuluh Nopember",
片麻痺者の歩行遊脚期の cycle-to-cycle 制御に基づく FES 制御法 : 床反力を考慮したモデルシミュレーション 柴田聡 渡邉高志, Achmad Arifin 吉澤誠 星宮望 東北大学大学院工学研究科, 仙台市青葉区荒巻字青葉 6-6- 東北大学情報シナジーセンター, 仙台市青葉区荒巻字青葉 6-6- Institute of Technoloy "Sepuluh Nopember",
選考会実施種目 強化指定標準記録 ( 女子 / 肢体不自由 視覚障がい ) 選考会実施種目 ( 選考会参加標準記録あり ) トラック 100m 200m 400m 800m 1500m T T T T33/34 24
 選考会実施種目 ( 選考会参加標準記録あり ) トラック 100m 200m 400m 800m 1500m T T T T33/34 24") 選考会実施種目 強化指定標準記録 ( 男子 / 肢体不自由 視覚障がい ) 選考会実施種目 ( 選考会参加標準記録あり ) トラック T11 11.66 11.79 T12 11.38 11.48 T13 11.38 11.50 T33 24.93 27.44 T34 17.98 18.96 T35 14.74 15.53 T36 13.47 14.04 100m T37 12.41 12.81 T38
選考会実施種目 強化指定標準記録 ( 男子 / 肢体不自由 視覚障がい ) 選考会実施種目 ( 選考会参加標準記録あり ) トラック T11 11.66 11.79 T12 11.38 11.48 T13 11.38 11.50 T33 24.93 27.44 T34 17.98 18.96 T35 14.74 15.53 T36 13.47 14.04 100m T37 12.41 12.81 T38
™…0ケ0ン0?トyム[f}
 最小値に対応する強度 である 図5 での空漕ぎから開始し その後3分間ごとに 25W ずつ漸増させた 運動はオールアウト まで追い込まず 250W までは運動を継続す ることとし それ以上の強度で自由意志で運 動を終了することを条件とした HRV の解析 はハートレートモニター 801i Polar社製 を 用い RR 間隔を記録し HRV の解析は各運動 強度の後半2分間のデータを対象にして専用
最小値に対応する強度 である 図5 での空漕ぎから開始し その後3分間ごとに 25W ずつ漸増させた 運動はオールアウト まで追い込まず 250W までは運動を継続す ることとし それ以上の強度で自由意志で運 動を終了することを条件とした HRV の解析 はハートレートモニター 801i Polar社製 を 用い RR 間隔を記録し HRV の解析は各運動 強度の後半2分間のデータを対象にして専用
Microsoft Word - 頻度解析プログラム概要
 PL-U4105 PcWaveFormFANA 頻度解析プログラムは PcWaveForm 波形表示解析プログラムに 1 次元解析及び 2 次元頻度解析を行う機能が追加されています 解析は収録したファイルを表示させ解析範囲を指定した後 アイコンをクリックすることで行います 1 次元頻度解析を選択すると解析条件設定 Window が表示されます 設定する解析条件 1 解析チャネル収録チャネルリストボックスから選択します
PL-U4105 PcWaveFormFANA 頻度解析プログラムは PcWaveForm 波形表示解析プログラムに 1 次元解析及び 2 次元頻度解析を行う機能が追加されています 解析は収録したファイルを表示させ解析範囲を指定した後 アイコンをクリックすることで行います 1 次元頻度解析を選択すると解析条件設定 Window が表示されます 設定する解析条件 1 解析チャネル収録チャネルリストボックスから選択します
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
表 5-1 機器 設備 説明変数のカテゴリースコア, 偏相関係数, 判別的中率 属性 カテゴリー カテゴリースコア レンジ 偏相関係数 性別 女性 男性 ~20 歳台 歳台 年齢 40 歳台
 第五章数量化 Ⅱ 類による解析の結果 本章では, 環境配慮行動の実践と回答者の性別と年齢, 業種, 業務といった属性との関 係性において, 環境配慮行動により大きな影響を与えている属性を特定するために実施し た数量化 Ⅱ 類の解析結果とその考察について述べる. 5-1 分析の目的と対象データ 本研究では, 環境配慮行動の実践と回答者の属性との関係性をより定量的に明らかにすることを目的に, 説明変数カテゴリーと目的変数カテゴリーとの関連性,
第五章数量化 Ⅱ 類による解析の結果 本章では, 環境配慮行動の実践と回答者の性別と年齢, 業種, 業務といった属性との関 係性において, 環境配慮行動により大きな影響を与えている属性を特定するために実施し た数量化 Ⅱ 類の解析結果とその考察について述べる. 5-1 分析の目的と対象データ 本研究では, 環境配慮行動の実践と回答者の属性との関係性をより定量的に明らかにすることを目的に, 説明変数カテゴリーと目的変数カテゴリーとの関連性,
S&C13-09Nov
 NSCA JAPAN Volume 13, Number 9, pages 3-9 S PORTS P ERFORMANCE S ERIES 2 サッカースタイル フリーキックの解剖学的 バイオメカニクス的分析 Anatomic and Biomechanical Analyses of the Soccer Style Free Kick John R. Olson, PhD, University
NSCA JAPAN Volume 13, Number 9, pages 3-9 S PORTS P ERFORMANCE S ERIES 2 サッカースタイル フリーキックの解剖学的 バイオメカニクス的分析 Anatomic and Biomechanical Analyses of the Soccer Style Free Kick John R. Olson, PhD, University
速度規制の目的と現状 警察庁交通局 1
 速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
リハビリテーションにおける立ち上がり訓練とブリッジ動作の筋活動量の検討 リハビリテーションにおける立ち上がり訓練とブリッジ動作の筋活動量の検討 中井真吾 1) 館俊樹 1) 中西健一郎 2) 山田悟史 1) Examination of the amount of muscle activity i
 館俊樹 1) 中西健一郎 2) 山田悟史 1) Examination of the amount of muscle activity i") 中井真吾 1) 館俊樹 1) 中西健一郎 2) 山田悟史 1) Examination of the amount of muscle activity in standing training and bridge motion in rehabilitation Shingo NAKAI,Toshiki Tachi,Kenichiro NAKANISHI,Satoshi YAMADA Abstract:The
中井真吾 1) 館俊樹 1) 中西健一郎 2) 山田悟史 1) Examination of the amount of muscle activity in standing training and bridge motion in rehabilitation Shingo NAKAI,Toshiki Tachi,Kenichiro NAKANISHI,Satoshi YAMADA Abstract:The
ビジネス統計 統計基礎とエクセル分析 正誤表
 ビジネス統計統計基礎とエクセル分析 ビジネス統計スペシャリスト エクセル分析スペシャリスト 公式テキスト正誤表と学習用データ更新履歴 平成 30 年 5 月 14 日現在 公式テキスト正誤表 頁場所誤正修正 6 知識編第 章 -3-3 最頻値の解説内容 たとえば, 表.1 のデータであれば, 最頻値は 167.5cm というたとえば, 表.1 のデータであれば, 最頻値は 165.0cm ということになります
ビジネス統計統計基礎とエクセル分析 ビジネス統計スペシャリスト エクセル分析スペシャリスト 公式テキスト正誤表と学習用データ更新履歴 平成 30 年 5 月 14 日現在 公式テキスト正誤表 頁場所誤正修正 6 知識編第 章 -3-3 最頻値の解説内容 たとえば, 表.1 のデータであれば, 最頻値は 167.5cm というたとえば, 表.1 のデータであれば, 最頻値は 165.0cm ということになります
早稲田大学大学院日本語教育研究科 修士論文概要書 論文題目 ネパール人日本語学習者による日本語のリズム生成 大熊伊宗 2018 年 3 月
 早稲田大学大学院日本語教育研究科 修士論文概要書 論文題目 ネパール人日本語学習者による日本語のリズム生成 大熊伊宗 2018 年 3 月 本研究は ネパール人日本語学習者 ( 以下 NPLS) のリズム生成の特徴を明らかにし NPLS に対する発音学習支援 リズム習得研究に示唆を与えるものである 以下 本論文 の流れに沿って 概要を記述する 第一章序論 第一章では 本研究の問題意識 意義 目的 本論文の構成を記した
早稲田大学大学院日本語教育研究科 修士論文概要書 論文題目 ネパール人日本語学習者による日本語のリズム生成 大熊伊宗 2018 年 3 月 本研究は ネパール人日本語学習者 ( 以下 NPLS) のリズム生成の特徴を明らかにし NPLS に対する発音学習支援 リズム習得研究に示唆を与えるものである 以下 本論文 の流れに沿って 概要を記述する 第一章序論 第一章では 本研究の問題意識 意義 目的 本論文の構成を記した
研究成果報告書
 様式 C-19 科学研究費助成事業 ( 科学研究費補助金 ) 研究成果報告書 平成 24 年 5 月 11 日現在 機関番号 :2241 研究種目 : 若手研究 (B) 研究期間 :21 ~211 課題番号 :22792233 研究課題名 ( 和文 ) 妊婦の姿勢制御機構解明のための起立から歩行開始までの一連動作における運動学的解析研究課題名 ( 英文 ) Kinematic analysis to
様式 C-19 科学研究費助成事業 ( 科学研究費補助金 ) 研究成果報告書 平成 24 年 5 月 11 日現在 機関番号 :2241 研究種目 : 若手研究 (B) 研究期間 :21 ~211 課題番号 :22792233 研究課題名 ( 和文 ) 妊婦の姿勢制御機構解明のための起立から歩行開始までの一連動作における運動学的解析研究課題名 ( 英文 ) Kinematic analysis to
フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 と
 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 と") フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 となるように半固定抵抗器を調整する ( ゼロ点調整のため ) 図 1 非反転増幅器 2010 年度版物理工学実験法
フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 となるように半固定抵抗器を調整する ( ゼロ点調整のため ) 図 1 非反転増幅器 2010 年度版物理工学実験法
Ⅰ はじめに 臨床実習において 座位での膝関節伸展筋力の測定および筋力増強訓練を行っ た際に 体幹を後方に傾ける現象を体験した Helen ら1 によると 膝関節伸展 の徒手筋力測定法は 座位で患者の両手は身体の両脇に検査台の上に置き安定を はかるか あるいは台の縁をつかませる また 膝関節屈筋群の
 股関節角度の違いが膝関節屈曲 伸展の筋力に及ぼす影響 網野 友裕 板谷 一樹 大嶽 彩乃 小瀬古裕也 德永 卓也 冨田 健広 目 Ⅰ はじめに 次 Ⅱ 対象と方法 98 98 Ⅲ 結果 99 Ⅳ 考察 101 97 Ⅰ はじめに 臨床実習において 座位での膝関節伸展筋力の測定および筋力増強訓練を行っ た際に 体幹を後方に傾ける現象を体験した Helen ら1 によると 膝関節伸展 の徒手筋力測定法は
股関節角度の違いが膝関節屈曲 伸展の筋力に及ぼす影響 網野 友裕 板谷 一樹 大嶽 彩乃 小瀬古裕也 德永 卓也 冨田 健広 目 Ⅰ はじめに 次 Ⅱ 対象と方法 98 98 Ⅲ 結果 99 Ⅳ 考察 101 97 Ⅰ はじめに 臨床実習において 座位での膝関節伸展筋力の測定および筋力増強訓練を行っ た際に 体幹を後方に傾ける現象を体験した Helen ら1 によると 膝関節伸展 の徒手筋力測定法は
安定性限界における指標と条件の影響 伊吹愛梨 < 要約 > 安定性限界は体重心 (COM) の可動範囲に基づいて定義づけられるが, 多くの研究では足圧中心 (COP) を測定している. 本研究は, 最大荷重移動時の COM 変位量を測定して COP 変位量と比較すること, 上肢 位置の違いが COP
 の可動範囲に基づいて定義づけられるが, 多くの研究では足圧中心 (COP) を測定している. 本研究は, 最大荷重移動時の COM 変位量を測定して COP 変位量と比較すること, 上肢 位置の違いが COP") 安定性限界における指標と条件の影響 伊吹愛梨 < 要約 > 安定性限界は体重心 (COM) の可動範囲に基づいて定義づけられるが, 多くの研究では足圧中心 (COP) を測定している. 本研究は, 最大荷重移動時の COM 変位量を測定して COP 変位量と比較すること, 上肢 位置の違いが COP や COM の変位量に与える影響について検討することを目的とした. 対象は健常若年者 12 名とした.2
安定性限界における指標と条件の影響 伊吹愛梨 < 要約 > 安定性限界は体重心 (COM) の可動範囲に基づいて定義づけられるが, 多くの研究では足圧中心 (COP) を測定している. 本研究は, 最大荷重移動時の COM 変位量を測定して COP 変位量と比較すること, 上肢 位置の違いが COP や COM の変位量に与える影響について検討することを目的とした. 対象は健常若年者 12 名とした.2
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル