画像工学入門
|
|
|
- はすな よせ
- 4 years ago
- Views:
Transcription
 はパラメータ空間の傾き x i, 切片 i の直線に対応する. b = x a + i i l x 画像空間 直線 l 上の点 ( x i, i ) x 直線 l 上の点から ab パラメータ空間への写像 ( aˆ, bˆ) ab パラメータ空間 a この直線は, 点 aa, bb = aa, bb を通る.")
1 ハフ変換 (Hough transform) 図形要素の抽出 画像中から直線や円など, 特定の図形要素を抽出する手法 直線の式 = ax + b b 対象 :2 値画像 (binar image) において x 空間の他に パラメータ空間 ab を考える l = ax ˆ + bˆ 1 x 画像空間 â x 直線 l から ab パラメータ空間への写像 ( aˆ, bˆ) ab パラメータ空間 a = ax ˆ + bˆ b 直線 l 上の 1 点 (x i, i ) はパラメータ空間の傾き x i, 切片 i の直線に対応する. b = x a + i i l x 画像空間 直線 l 上の点 ( x i, i ) x 直線 l 上の点から ab パラメータ空間への写像 ( aˆ, bˆ) ab パラメータ空間 a この直線は, 点 aa, bb = aa, bb を通る. なぜなら ii = xx ii aa + bb 1
2 ハフ変換 (Hough transform) 図形要素の抽出 = ax ˆ + bˆ b 直線 l 上の 1 点 (x i, i ) はパラメータ空間の傾き x i,, 切片 i の直線に対応する. b = x a + i i l 直線 l 上の点 ( x i, i ) ( aˆ, bˆ) x 画像空間 x ab パラメータ空間 a 直線 l 上の点の ab パラメータ空間への写像 ハフ変換 直線 l 上の多数の点をパラメータ空間に変換し, この空間上で直線の交差する点の座標を検出すれば, x 画像空間中の直線を決定することができる. 利点エッジ検出などの処理によって直線が完全に検出できず, 線がとぎれていても, 直線を検出できる. 2
 パラメータ空間を小さなセルに分割")

3 ハフ変換の具体的な手順 画像のエッジ抽出処理 エッジの各画素をパラメータ空間へ投票 (voting) パラメータ空間での投票度数の最大値検出 ( あるいは複数の局所最大値検出 ) パラメータ空間を小さなセルに分割 b 線候補画素をパラメータ空間に写像した直線が通過するセルの値を +1. a x 結果として, パラメータ空間の各セルは直線が通過した回数を値としてもつ ( 投票度数という ). 3
4 =ax+b の表現における問題点 = ax ˆ + bˆ を用いてパラメータを算出する場合の問題 パラメータの範囲が - から + になってしまう. b ( aˆ, bˆ) aˆ = ax ˆ + bˆ bˆ x a x 画像空間 ab パラメータ空間 直線 l の ab パラメータ空間への写像 4
5 Duda と Hart の Hough 変換 直線を, 原点からの距離と法線の角度をパラメータとして表現する. ρ 補足 ˆ x [ cosθ sin ˆ] θ = ˆ = const. ρ Y 画像領域 ρˆ θˆ ˆ ρ = x cos ˆ θ + X sin ˆ θ x ( ˆ, ρ ˆ) θ 画像空間の原点を左図のようにとれば ˆ ρ X ˆ θ π / 2 θ 2 + Y 2 Y ρˆ 直線上の 1 点は,ρθ パラメータ空間において, 正弦波として表現される. θˆ ˆ ρ = x cos ˆ θ + x i, ) ( i X x sin ˆ θ ρ ρ = = ( ˆ, ρ ˆ) θ x cosθ + i Asin( θ + α) θ i A = sinθ x 2 i + α = cos 1 ( 2 i i / A) 5
6 直線成分の検出例 原画像 ( カラー画像 ) モノクロ画像へ変換 ( ここでは G 成分利用 ) モノクロ画像 Cann オペレータによりエッジ成分を抽出 2 値化 エッジ画像 6

7 直線成分の検出例 ( つづき ) ハフ変換 ρ エッジ画像 θ 局所最大値を大きい順に 5 個抽出. 5 本の直線上の画素のうち, 実際にエッジとして抽出されている線分を抽出. 7
![[3pA11] Optics & Photonics Japan 215](/docs-images/100/146345464/images/8-0.jpg "微小循環のイメージングと血流速度の推定 可視化 高橋穂 [1] 織田成人")
![[2] 大西峻 [3] 羽石秀昭 [3] [1] 千葉大学大学院工学研究科](/docs-images/100/146345464/images/8-1.jpg "[2] 千葉大学大学院医学研究院 [3]")
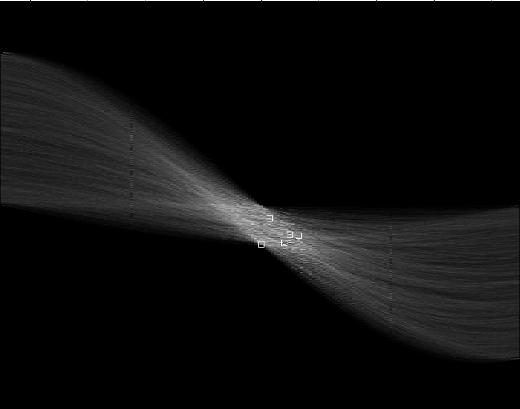
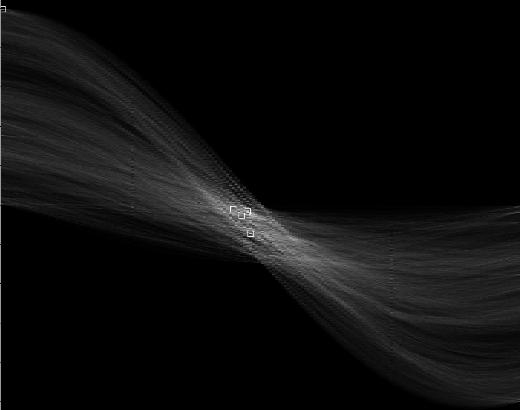
8 [3pA11] Optics & Photonics Japan 215 微小循環のイメージングと血流速度の推定 可視化 高橋穂 [1] 織田成人 [2] 大西峻 [3] 羽石秀昭 [3] [1] 千葉大学大学院工学研究科 [2] 千葉大学大学院医学研究院 [3] 千葉大学フロンティア医工学センター


9 研究背景 微小循環 1 μm 以下の径の血管領域 生命維持のために重要な機能 敗血症性ショック 全身の血流分布の異常をきたし, 主要臓器への酸素の供給が障害される ショックの診断の指標 乳酸 組織が酸欠になると乳酸が蓄積する 乳酸値を検査するには時間がかかる 採血をするため侵襲的である 微小循環を直接観察し, ショック状態の診断をより早く行うことが望まれている

 表層の微小循環の非侵襲的な光イメージング")

10 撮影原理 Sidestream Dark Field (SDF) Imaging (C. Ince et al., 25) 表層の微小循環の非侵襲的な光イメージング 赤血球が黒く表示される SDF 撮影画像 デバイス光学系が照明とカメラで分離表面反射によるアーチファクトがない 照明光赤血球のヘモグロビンによく吸収される可視域の短波長の光を使用赤血球を強調したイメージングが可能




11 研究目的 先行研究 (F. Taccone et al., 21) で敗血症では血管構造が変化することが報告されている 正常時異常時 ( ショック状態 ) 観察するだけでは定量的に評価することができない微小循環の観察を行い, ショック状態の定量的な診断法の確立を目指す診断を行うために血液循環の可視化, 定量化が望まれている研究の目的 SDF 撮影法を用いた微小循環の非侵襲的な血流速度推定を行う



12 血流速度算出手順前処理 時空間画像の作成補正動画像コントラスト強調画像血管領域画像取得動画像 テンプレートマッチングによる体動の補正 正規化を行いコントラストを強調 領域分割処理による血管抽出 注目領域の選択 中心線を検出 Path Distance l 8 つの小領域に分割スケルトン処理による中心線検出 Path Distance l [μm] 時空間画像 Δ l Δt Time [s] 中心線の画素値を並べ時空間画像を作成

![, 28) Path Distance l [μm] Hough 変換 : 画像中から直線を (θ, ρ)](/docs-images/100/146345464/images/13-1.jpg "空間への射影と投票によって抽出する方法 8 血流がある場合 ρ θ Δl Δt Time [s] 3 秒ごとに 1")

13 血流速度算出手順血流速度推定 Hough 変換を用いた血流速度推定 (J.G.G. Dobbe et al., 28) Path Distance l [μm] Hough 変換 : 画像中から直線を (θ, ρ) 空間への射影と投票によって抽出する方法 8 血流がある場合 ρ θ Δl Δt Time [s] 3 秒ごとに 1 枚の時空間画像を作成 3 ρ θ-ρ 空間 - π/2 π/2 投票数が1 以下だった場合, 直線を検出しない直線を検出しなかった際の血流速度は μm/sとする θ 16 1 Path Distance l [μm] 8 血流がない場合 Time [s] 3 v x π [ µ m / s] = = tan θ t 2 時空間画像の傾きから血流速度を推定




14 時空間画像エッジ画像ハフ変換 静脈 ρ θ 動脈 ρ θ 静脈 ρ θ



15 撮影装置 マルチカラー LED を使用した SDF プローブ LED 光源コントロールユニット プローブ カメラ : ID4MB-IP-U (idule 社製 ) 撮像素子 : CMOS 取得画像サイズ : pixel フレームレート : 39 fps 1ピクセルあたりの物体サイズ : 1.2 μm マルチカラー LED: SMLV56RGB1W(ROHM 社製 ) Absorbance Index [cm -1 /M] ヘモグロビン吸光係数 使用した波長 HbO Wavelength [nm] Hb ( 田村俊世他コロナ社医用機器 Ⅰ) ピーク波長 47 nm 527 nm 2 波長を使用し, 動脈と静脈を区別 527 nm の波長のみ使用し血流速度解析を行う
 小腸を対象")

16 測定撮影実験概要動物実験承認番号 : 動 実験手順 : ラット ( 週齢 : 12 週, Wistar) 小腸を対象 撮影箇所 ラット小腸 プローブ 結紮 ブルドック鉗子 健常 結紮 解放 合計 撮影時間 [s] 開腹したラットの小腸を取り出す 2. ブルドック鉗子を用いて結紮する 3. SDF 画像を取得する
17 血流速度推定健常小腸 小領域の時空間画像を作成 Path Distance l [μm] 8 Time [s] 3 静脈 動脈 静脈 取得画像の輝度値の差から動脈と静脈を判断 血流速度によって時空間画像に現れる直線の傾きが異なることを確認 Path Distance l [μm] Path Distance l [μm] 8 8 Time [s] Time [s] 3 3
 静脈 v1-698 ± 1 v2-687 ± 9 v3-66 ± 8 静脈 v4-75 ± 8 v5-71 ± 8 動脈 a1 739 ± 7 a2 74 ± 7")
18 血流速度推定健常小腸 補正動画像 血流速度推定結果 v1 v2 v3 流れの向き a1 a1 a3 v4 v5 時間平均血流速度 [μm/s] ( 動脈の流れる方向を正とする ) 静脈 v1-698 ± 1 v2-687 ± 9 v3-66 ± 8 静脈 v4-75 ± 8 v5-71 ± 8 動脈 a1 739 ± 7 a2 74 ± 7 a3 747 ± 4 文献値 736 (R. Varga et al., 214) ラットの下顎を Orthogonal Polarization Spectral Imaging で撮影 静脈より動脈のほうが流れが速いことを確認 v2 と v3 を比較し, 血管の合流後で 4 % 血流速度が速くなっている
19 血流速度推定血流変化 取得動画像 結紮時 解放時 健常結紮中 6 s 解放 [s] 健常結紮解放 結紮による血流速度の変化を確認

![静脈 動脈 静脈 687 [μm/s] 687 [μm/s] 677 [μm/s] 結紮による血流速度の時間変化を確認](/docs-images/100/146345464/images/20-3.jpg "73 [μm/s] 73 [μm/s] 698 [μm/s] 回復順 解放後の1 秒間平均速さ 動脈 先 結紮前より速い")
20 血流速度推定血流変化 推定血流速度の時間変化をグラフに示す 742 [μm/s] 742 [μm/s] 797 [μm/s] 静脈 動脈 静脈 687 [μm/s] 687 [μm/s] 677 [μm/s] 結紮による血流速度の時間変化を確認 73 [μm/s] 73 [μm/s] 698 [μm/s] 回復順 解放後の1 秒間平均速さ 動脈 先 結紮前より速い ( [μm/s]) 静脈 後 結紮前と変わらず ( [μm/s])
21 まとめと今後の課題 まとめ SDF 撮影法で得られる微小血管動画像から血流速度を推定する手順を示した ラット実験を実施し以下の現象を観察した - 静脈より動脈のほうが流れが速い (L.V. Wang et al., 211) - 血管の合流後で血流速度が速い - 結紮解放前後の血流速度の回復が静脈より動脈のほうが速い 今後の課題 ラットのショック状態モデルを作製し, 血流速度の変化を観察する ショック状態による乳酸値の変化と血流速度の変化の生体反応の速さを比較する 謝辞 : 本研究の一部は文部科学省科学研究費補助金基盤研究 (B) ( 課題番号 ) により行われた
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
粒子画像流速測定法を用いた室内流速測定法に関する研究
 可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
70 : 20 : A B (20 ) (30 ) 50 1
 (30 ) 50 1") 70 : 0 : A B (0 ) (30 ) 50 1 1 4 1.1................................................ 5 1. A............................................... 6 1.3 B............................................... 7 8.1 A...............................................
70 : 0 : A B (0 ) (30 ) 50 1 1 4 1.1................................................ 5 1. A............................................... 6 1.3 B............................................... 7 8.1 A...............................................
Microsoft PowerPoint - ip02_01.ppt [互換モード]
![Microsoft PowerPoint - ip02_01.ppt [互換モード]](/thumbs/96/127250376.jpg "Microsoft PowerPoint - ip02_01.ppt [互換モード]") 空間周波数 周波数領域での処理 空間周波数 (spatial frquncy) とは 単位長さ当たりの正弦波状の濃淡変化の繰り返し回数を表したもの 正弦波 : y sin( t) 周期 : 周波数 : T f / T 角周波数 : f 画像処理 空間周波数 周波数領域での処理 波形が違うと 周波数も違う 画像処理 空間周波数 周波数領域での処理 画像処理 3 周波数領域での処理 周波数は一つしかない?-
空間周波数 周波数領域での処理 空間周波数 (spatial frquncy) とは 単位長さ当たりの正弦波状の濃淡変化の繰り返し回数を表したもの 正弦波 : y sin( t) 周期 : 周波数 : T f / T 角周波数 : f 画像処理 空間周波数 周波数領域での処理 波形が違うと 周波数も違う 画像処理 空間周波数 周波数領域での処理 画像処理 3 周波数領域での処理 周波数は一つしかない?-
Microsoft Word - 卒論レジュメ_最終_.doc
 指紋認証のマニューシャ抽出について 澤見研究室 I02I036 兼信雄一 I02I093 柳楽和信 I02I142 吉田寛孝 1. はじめに近年, キャッシュカードや暗証番号が盗用され, 現金が引き出されるような事件が相次いでいる. これらの対向策として人間の体の一部を認証の鍵として利用する生体認証に注目が集まっている. そこで我々は, 生体認証で最も歴史がある指紋認証技術に着目した. 指紋認証方式は,2
指紋認証のマニューシャ抽出について 澤見研究室 I02I036 兼信雄一 I02I093 柳楽和信 I02I142 吉田寛孝 1. はじめに近年, キャッシュカードや暗証番号が盗用され, 現金が引き出されるような事件が相次いでいる. これらの対向策として人間の体の一部を認証の鍵として利用する生体認証に注目が集まっている. そこで我々は, 生体認証で最も歴史がある指紋認証技術に着目した. 指紋認証方式は,2
64 3 g=9.85 m/s 2 g=9.791 m/s 2 36, km ( ) 1 () 2 () m/s : : a) b) kg/m kg/m k
 1 () 2 () m/s : : a) b) kg/m kg/m k") 63 3 Section 3.1 g 3.1 3.1: : 64 3 g=9.85 m/s 2 g=9.791 m/s 2 36, km ( ) 1 () 2 () 3 9.8 m/s 2 3.2 3.2: : a) b) 5 15 4 1 1. 1 3 14. 1 3 kg/m 3 2 3.3 1 3 5.8 1 3 kg/m 3 3 2.65 1 3 kg/m 3 4 6 m 3.1. 65 5
63 3 Section 3.1 g 3.1 3.1: : 64 3 g=9.85 m/s 2 g=9.791 m/s 2 36, km ( ) 1 () 2 () 3 9.8 m/s 2 3.2 3.2: : a) b) 5 15 4 1 1. 1 3 14. 1 3 kg/m 3 2 3.3 1 3 5.8 1 3 kg/m 3 3 2.65 1 3 kg/m 3 4 6 m 3.1. 65 5
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
koji07-01.dvi
 2007 I II III 1, 2, 3, 4, 5, 6, 7 5 10 19 (!) 1938 70 21? 1 1 2 1 2 2 1! 4, 5 1? 50 1 2 1 1 2 2 1?? 2 1 1, 2 1, 2 1, 2, 3,... 3 1, 2 1, 3? 2 1 3 1 2 1 1, 2 2, 3? 2 1 3 2 3 2 k,l m, n k,l m, n kn > ml...?
2007 I II III 1, 2, 3, 4, 5, 6, 7 5 10 19 (!) 1938 70 21? 1 1 2 1 2 2 1! 4, 5 1? 50 1 2 1 1 2 2 1?? 2 1 1, 2 1, 2 1, 2, 3,... 3 1, 2 1, 3? 2 1 3 1 2 1 1, 2 2, 3? 2 1 3 2 3 2 k,l m, n k,l m, n kn > ml...?
H24_大和証券_研究業績_p indd
 強度変調回転照射の品質管理に向けた精度検証手法の開発 公益財団法人がん研究会有明病院 診療放射線技師松林史泰 ( 共同研究者 ) 公益財団法人がん研究会有明病院診療放射線技師佐藤智春診療放射線技師伊藤康診療放射線技師髙橋良医学物理士橘英伸北里大学大学院医療系研究科教授丸山浩一 はじめに近年 X 線を用いた放射線治療において 強度変調回転照射法 (Volumetric Modulated Arc Therapy:VMAT)
強度変調回転照射の品質管理に向けた精度検証手法の開発 公益財団法人がん研究会有明病院 診療放射線技師松林史泰 ( 共同研究者 ) 公益財団法人がん研究会有明病院診療放射線技師佐藤智春診療放射線技師伊藤康診療放射線技師髙橋良医学物理士橘英伸北里大学大学院医療系研究科教授丸山浩一 はじめに近年 X 線を用いた放射線治療において 強度変調回転照射法 (Volumetric Modulated Arc Therapy:VMAT)
")
2 Hermite-Gaussian モード 2-1 Hermite-Gaussian モード 自由空間を伝搬するレーザ光は次のような Hermite-gaussian Modes を持つ光波として扱う ことができる ここで U lm (x, y, z) U l (x, z)u m (y, z) e
 U l (x, z)u m (y, z) e") Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
sec13.dvi
 13 13.1 O r F R = m d 2 r dt 2 m r m = F = m r M M d2 R dt 2 = m d 2 r dt 2 = F = F (13.1) F O L = r p = m r ṙ dl dt = m ṙ ṙ + m r r = r (m r ) = r F N. (13.2) N N = R F 13.2 O ˆn ω L O r u u = ω r 1 1:
13 13.1 O r F R = m d 2 r dt 2 m r m = F = m r M M d2 R dt 2 = m d 2 r dt 2 = F = F (13.1) F O L = r p = m r ṙ dl dt = m ṙ ṙ + m r r = r (m r ) = r F N. (13.2) N N = R F 13.2 O ˆn ω L O r u u = ω r 1 1:
PowerPoint プレゼンテーション
 空間フィルタリング (spatal lterng) 入力画像の対応する画素値だけではなく その周囲 ( 近傍領域 ) の画素も含めた領域内の画素値を用いて 出力画像の対応する画素値を計算する処理 入力画像出力画像入力画像出力画像 画素ごとの濃淡変換 ( 階調処理 ) 領域に基づく濃淡変換 ( 空間フィルタリング ) 空間フィルタ (spatal lter) 線形フィルタ (lnear lter) w
空間フィルタリング (spatal lterng) 入力画像の対応する画素値だけではなく その周囲 ( 近傍領域 ) の画素も含めた領域内の画素値を用いて 出力画像の対応する画素値を計算する処理 入力画像出力画像入力画像出力画像 画素ごとの濃淡変換 ( 階調処理 ) 領域に基づく濃淡変換 ( 空間フィルタリング ) 空間フィルタ (spatal lter) 線形フィルタ (lnear lter) w
す 局所領域 ωk において 線形変換に用いる係数 (ak 画素の係数 (ak bk ) を算出し 入力画像の信号成分を bk ) は次式のコスト関数 E を最小化するように最適化 有さない画素に対して 式 (2) より画素値を算出する される これにより 低解像度な画像から補間によるアップサ E(
 を算出し 入力画像の信号成分を bk ) は次式のコスト関数 E を最小化するように最適化 有さない画素に対して 式 (2) より画素値を算出する される これにより 低解像度な画像から補間によるアップサ E(") IR E-mail: hf@cs.chubu.ac.jp Abstract IR RGB ( ) IR IR IR RGB RGB PSNR 1 Time-Of- Flight(TOF)[1] Kinect [2] TOF LED TOF [3] [6] [4][5] 2 [6] RGB ( ) Infrared(IR) IR 2 2.1 1 す 局所領域 ωk において 線形変換に用いる係数 (ak
IR E-mail: hf@cs.chubu.ac.jp Abstract IR RGB ( ) IR IR IR RGB RGB PSNR 1 Time-Of- Flight(TOF)[1] Kinect [2] TOF LED TOF [3] [6] [4][5] 2 [6] RGB ( ) Infrared(IR) IR 2 2.1 1 す 局所領域 ωk において 線形変換に用いる係数 (ak
2.2 h h l L h L = l cot h (1) (1) L l L l l = L tan h (2) (2) L l 2 l 3 h 2.3 a h a h (a, h)
 (1) L l L l l = L tan h (2) (2) L l 2 l 3 h 2.3 a h a h (a, h)") 1 16 10 5 1 2 2.1 a a a 1 1 1 2.2 h h l L h L = l cot h (1) (1) L l L l l = L tan h (2) (2) L l 2 l 3 h 2.3 a h a h (a, h) 4 2 3 4 2 5 2.4 x y (x,y) l a x = l cot h cos a, (3) y = l cot h sin a (4) h a
1 16 10 5 1 2 2.1 a a a 1 1 1 2.2 h h l L h L = l cot h (1) (1) L l L l l = L tan h (2) (2) L l 2 l 3 h 2.3 a h a h (a, h) 4 2 3 4 2 5 2.4 x y (x,y) l a x = l cot h cos a, (3) y = l cot h sin a (4) h a
Chap3.key
 区分求積法. 面積 ( )/ f () > n + n, S 長方形の和集合で近似 n f (n ) リーマン和 f (n ) 区分求積法 リーマン和 S S n n / n n f ()d リーマン積分 ( + ) + S (, f ( )) 微分の心 Zoom In して局所的な性質を調べる 積分の心 Zoom Ou して大域的な性質を調べる 曲線の長さ 領域の面積や体積 ある領域に含まれる物質の質量
区分求積法. 面積 ( )/ f () > n + n, S 長方形の和集合で近似 n f (n ) リーマン和 f (n ) 区分求積法 リーマン和 S S n n / n n f ()d リーマン積分 ( + ) + S (, f ( )) 微分の心 Zoom In して局所的な性質を調べる 積分の心 Zoom Ou して大域的な性質を調べる 曲線の長さ 領域の面積や体積 ある領域に含まれる物質の質量
A (1) = 4 A( 1, 4) 1 A 4 () = tan A(0, 0) π A π
 = 4 A( 1, 4) 1 A 4 () = tan A(0, 0) π A π") 4 4.1 4.1.1 A = f() = f() = a f (a) = f() (a, f(a)) = f() (a, f(a)) f(a) = f 0 (a)( a) 4.1 (4, ) = f() = f () = 1 = f (4) = 1 4 4 (4, ) = 1 ( 4) 4 = 1 4 + 1 17 18 4 4.1 A (1) = 4 A( 1, 4) 1 A 4 () = tan
4 4.1 4.1.1 A = f() = f() = a f (a) = f() (a, f(a)) = f() (a, f(a)) f(a) = f 0 (a)( a) 4.1 (4, ) = f() = f () = 1 = f (4) = 1 4 4 (4, ) = 1 ( 4) 4 = 1 4 + 1 17 18 4 4.1 A (1) = 4 A( 1, 4) 1 A 4 () = tan
Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]
![Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]](/thumbs/94/118755799.jpg "Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]") 第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
4 4 θ X θ P θ 4. 0, 405 P 0 X 405 X P 4. () 60 () 45 () 40 (4) 765 (5) 40 B 60 0 P = 90, = ( ) = X
 60 () 45 () 40 (4) 765 (5) 40 B 60 0 P = 90, = ( ) = X") 4 4. 4.. 5 5 0 A P P P X X X X +45 45 0 45 60 70 X 60 X 0 P P 4 4 θ X θ P θ 4. 0, 405 P 0 X 405 X P 4. () 60 () 45 () 40 (4) 765 (5) 40 B 60 0 P 0 0 + 60 = 90, 0 + 60 = 750 0 + 60 ( ) = 0 90 750 0 90 0
4 4. 4.. 5 5 0 A P P P X X X X +45 45 0 45 60 70 X 60 X 0 P P 4 4 θ X θ P θ 4. 0, 405 P 0 X 405 X P 4. () 60 () 45 () 40 (4) 765 (5) 40 B 60 0 P 0 0 + 60 = 90, 0 + 60 = 750 0 + 60 ( ) = 0 90 750 0 90 0
スライド タイトルなし
 線形代数 演習 (008 年度版 ) 008/5/6 線形代数 演習 Ⅰ コンピュータ グラフィックス, 次曲面と線形代数指南書第七の巻 直交行列, 実対称行列とその対角化, 次曲線池田勉龍谷大学理工学部数理情報学科 実行列, 正方行列, 実対称行列, 直交行列 a a N A am a MN 実行列 : すべての成分 a が実数である行列 ij ji ij 正方行列 : 行の数と列の数が等しい (
線形代数 演習 (008 年度版 ) 008/5/6 線形代数 演習 Ⅰ コンピュータ グラフィックス, 次曲面と線形代数指南書第七の巻 直交行列, 実対称行列とその対角化, 次曲線池田勉龍谷大学理工学部数理情報学科 実行列, 正方行列, 実対称行列, 直交行列 a a N A am a MN 実行列 : すべての成分 a が実数である行列 ij ji ij 正方行列 : 行の数と列の数が等しい (
A(6, 13) B(1, 1) 65 y C 2 A(2, 1) B( 3, 2) C 66 x + 2y 1 = 0 2 A(1, 1) B(3, 0) P 67 3 A(3, 3) B(1, 2) C(4, 0) (1) ABC G (2) 3 A B C P 6
 B(1, 1) 65 y C 2 A(2, 1) B( 3, 2) C 66 x + 2y 1 = 0 2 A(1, 1) B(3, 0) P 67 3 A(3, 3) B(1, 2) C(4, 0) (1) ABC G (2) 3 A B C P 6") 1 1 1.1 64 A6, 1) B1, 1) 65 C A, 1) B, ) C 66 + 1 = 0 A1, 1) B, 0) P 67 A, ) B1, ) C4, 0) 1) ABC G ) A B C P 64 A 1, 1) B, ) AB AB = 1) + 1) A 1, 1) 1 B, ) 1 65 66 65 C0, k) 66 1 p, p) 1 1 A B AB A 67
1 1 1.1 64 A6, 1) B1, 1) 65 C A, 1) B, ) C 66 + 1 = 0 A1, 1) B, 0) P 67 A, ) B1, ) C4, 0) 1) ABC G ) A B C P 64 A 1, 1) B, ) AB AB = 1) + 1) A 1, 1) 1 B, ) 1 65 66 65 C0, k) 66 1 p, p) 1 1 A B AB A 67
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
 006 11 8 0 3 1 5 1.1..................... 5 1......................... 6 1.3.................... 6 1.4.................. 8 1.5................... 8 1.6................... 10 1.6.1......................
006 11 8 0 3 1 5 1.1..................... 5 1......................... 6 1.3.................... 6 1.4.................. 8 1.5................... 8 1.6................... 10 1.6.1......................
 直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. このサンプルページの内容は, 初版 1 刷発行時のものです.
 微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. ttp://www.morikita.co.jp/books/mid/00571 このサンプルページの内容は, 初版 1 刷発行時のものです. i ii 014 10 iii [note] 1 3 iv 4 5 3 6 4 x 0 sin x x 1 5 6 z = f(x, y) 1 y = f(x)
微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. ttp://www.morikita.co.jp/books/mid/00571 このサンプルページの内容は, 初版 1 刷発行時のものです. i ii 014 10 iii [note] 1 3 iv 4 5 3 6 4 x 0 sin x x 1 5 6 z = f(x, y) 1 y = f(x)
Microsoft PowerPoint - CV06Cut.ppt [互換モード]
![Microsoft PowerPoint - CV06Cut.ppt [互換モード]](/thumbs/88/115011851.jpg "Microsoft PowerPoint - CV06Cut.ppt [互換モード]") 画像特徴 ( 点 直線 領域 ) の検出と識別 -3 Hough 変換 投票と多数決原理に基づく幾何学的対象の検出と識別 参考書 : 松山隆司 久野義徳 井宮淳 コンピュータビジョンー技術評論と将来展望ー新技術コミュニケーションズ酒井幸市デジタル画像処理入門コロナ 結果として ( エッジ点 ) 例えば : 欠落のある情報 投票 多数決 図形検出 何の図形? 結果として 投票と多数決原理に基づく図形の検出
画像特徴 ( 点 直線 領域 ) の検出と識別 -3 Hough 変換 投票と多数決原理に基づく幾何学的対象の検出と識別 参考書 : 松山隆司 久野義徳 井宮淳 コンピュータビジョンー技術評論と将来展望ー新技術コミュニケーションズ酒井幸市デジタル画像処理入門コロナ 結果として ( エッジ点 ) 例えば : 欠落のある情報 投票 多数決 図形検出 何の図形? 結果として 投票と多数決原理に基づく図形の検出


知能科学:ニューラルネットワーク
 2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
知能科学:ニューラルネットワーク
 2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
all.dvi
 5,, Euclid.,..,... Euclid,.,.,, e i (i =,, ). 6 x a x e e e x.:,,. a,,. a a = a e + a e + a e = {e, e, e } a (.) = a i e i = a i e i (.) i= {a,a,a } T ( T ),.,,,,. (.),.,...,,. a 0 0 a = a 0 + a + a 0
5,, Euclid.,..,... Euclid,.,.,, e i (i =,, ). 6 x a x e e e x.:,,. a,,. a a = a e + a e + a e = {e, e, e } a (.) = a i e i = a i e i (.) i= {a,a,a } T ( T ),.,,,,. (.),.,...,,. a 0 0 a = a 0 + a + a 0
本日の内容 HbA1c 測定方法別原理と特徴 HPLC 法 免疫法 酵素法 原理差による測定値の乖離要因
 HbA1c 測定系について ~ 原理と特徴 ~ 一般社団法人日本臨床検査薬協会 技術運営委員会副委員長 安部正義 本日の内容 HbA1c 測定方法別原理と特徴 HPLC 法 免疫法 酵素法 原理差による測定値の乖離要因 HPLC 法 HPLC 法原理 高速液体クロマトグラフィー 混合物の分析法の一つ 固体または液体の固定相 ( 吸着剤 ) 中で 液体または気体の移動相 ( 展開剤 ) に試料を加えて移動させ
HbA1c 測定系について ~ 原理と特徴 ~ 一般社団法人日本臨床検査薬協会 技術運営委員会副委員長 安部正義 本日の内容 HbA1c 測定方法別原理と特徴 HPLC 法 免疫法 酵素法 原理差による測定値の乖離要因 HPLC 法 HPLC 法原理 高速液体クロマトグラフィー 混合物の分析法の一つ 固体または液体の固定相 ( 吸着剤 ) 中で 液体または気体の移動相 ( 展開剤 ) に試料を加えて移動させ
#A A A F, F d F P + F P = d P F, F y P F F x A.1 ( α, 0), (α, 0) α > 0) (x, y) (x + α) 2 + y 2, (x α) 2 + y 2 d (x + α)2 + y 2 + (x α) 2 + y 2 =
, (α, 0) α > 0) (x, y) (x + α) 2 + y 2, (x α) 2 + y 2 d (x + α)2 + y 2 + (x α) 2 + y 2 =") #A A A. F, F d F P + F P = d P F, F P F F A. α, 0, α, 0 α > 0, + α +, α + d + α + + α + = d d F, F 0 < α < d + α + = d α + + α + = d d α + + α + d α + = d 4 4d α + = d 4 8d + 6 http://mth.cs.kitmi-it.c.jp/
#A A A. F, F d F P + F P = d P F, F P F F A. α, 0, α, 0 α > 0, + α +, α + d + α + + α + = d d F, F 0 < α < d + α + = d α + + α + = d d α + + α + d α + = d 4 4d α + = d 4 8d + 6 http://mth.cs.kitmi-it.c.jp/
スライド 1
 5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
() x + y + y + x dy dx = 0 () dy + xy = x dx y + x y ( 5) ( s55906) 0.7. (). 5 (). ( 6) ( s6590) 0.8 m n. 0.9 n n A. ( 6) ( s6590) f A (λ) = det(a λi)
 x + y + y + x dy dx = 0 () dy + xy = x dx y + x y ( 5) ( s55906) 0.7. (). 5 (). ( 6) ( s6590) 0.8 m n. 0.9 n n A. ( 6) ( s6590) f A (λ) = det(a λi)") 0. A A = 4 IC () det A () A () x + y + z = x y z X Y Z = A x y z ( 5) ( s5590) 0. a + b + c b c () a a + b + c c a b a + b + c 0 a b c () a 0 c b b c 0 a c b a 0 0. A A = 7 5 4 5 0 ( 5) ( s5590) () A ()
0. A A = 4 IC () det A () A () x + y + z = x y z X Y Z = A x y z ( 5) ( s5590) 0. a + b + c b c () a a + b + c c a b a + b + c 0 a b c () a 0 c b b c 0 a c b a 0 0. A A = 7 5 4 5 0 ( 5) ( s5590) () A ()
Gmech08.dvi
 51 5 5.1 5.1.1 P r P z θ P P P z e r e, z ) r, θ, ) 5.1 z r e θ,, z r, θ, = r sin θ cos = r sin θ sin 5.1) e θ e z = r cos θ r, θ, 5.1: 0 r
51 5 5.1 5.1.1 P r P z θ P P P z e r e, z ) r, θ, ) 5.1 z r e θ,, z r, θ, = r sin θ cos = r sin θ sin 5.1) e θ e z = r cos θ r, θ, 5.1: 0 r
大成建設技術センター報第 39 号 (26) 3. 画像解析技術本技術では 画像の二値化処理において ウェーブレット変換を利用している ウェーブレット変換とは 式 (1) で表されるウェーブレット関数を拡大 縮小することにより 時間情報と周波数情報を同時に解析する手法である この手法は 198 年代
 3. 画像解析技術本技術では 画像の二値化処理において ウェーブレット変換を利用している ウェーブレット変換とは 式 (1) で表されるウェーブレット関数を拡大 縮小することにより 時間情報と周波数情報を同時に解析する手法である この手法は 198 年代") 大成建設技術センター報第 39 号 (26) ウェーブレット変換を用いたひび割れ画像解析 コンクリート構造物の点検 調査に迅速に対応 武田均 *1 小山哲 *2 堀口賢一 *1 *1 丸屋剛 Keywords : crack, image analysis, digital still camera, wavelet transform, maintenance ひび割れ, 画像解析, デジタルカメラ,
大成建設技術センター報第 39 号 (26) ウェーブレット変換を用いたひび割れ画像解析 コンクリート構造物の点検 調査に迅速に対応 武田均 *1 小山哲 *2 堀口賢一 *1 *1 丸屋剛 Keywords : crack, image analysis, digital still camera, wavelet transform, maintenance ひび割れ, 画像解析, デジタルカメラ,
ma22-9 u ( v w) = u v w sin θê = v w sin θ u cos φ = = 2.3 ( a b) ( c d) = ( a c)( b d) ( a d)( b c) ( a b) ( c d) = (a 2 b 3 a 3 b 2 )(c 2 d 3 c 3 d
 = u v w sin θê = v w sin θ u cos φ = = 2.3 ( a b) ( c d) = ( a c)( b d) ( a d)( b c) ( a b) ( c d) = (a 2 b 3 a 3 b 2 )(c 2 d 3 c 3 d") A 2. x F (t) =f sin ωt x(0) = ẋ(0) = 0 ω θ sin θ θ 3! θ3 v = f mω cos ωt x = f mω (t sin ωt) ω t 0 = f ( cos ωt) mω x ma2-2 t ω x f (t mω ω (ωt ) 6 (ωt)3 = f 6m ωt3 2.2 u ( v w) = v ( w u) = w ( u v) ma22-9
A 2. x F (t) =f sin ωt x(0) = ẋ(0) = 0 ω θ sin θ θ 3! θ3 v = f mω cos ωt x = f mω (t sin ωt) ω t 0 = f ( cos ωt) mω x ma2-2 t ω x f (t mω ω (ωt ) 6 (ωt)3 = f 6m ωt3 2.2 u ( v w) = v ( w u) = w ( u v) ma22-9
1. 4cm 16 cm 4cm 20cm 18 cm L λ(x)=ax [kg/m] A x 4cm A 4cm 12 cm h h Y 0 a G 0.38h a b x r(x) x y = 1 h 0.38h G b h X x r(x) 1 S(x) = πr(x) 2 a,b, h,π
![1. 4cm 16 cm 4cm 20cm 18 cm L λ(x)=ax [kg/m] A x 4cm A 4cm 12 cm h h Y 0 a G 0.38h a b x r(x) x y = 1 h 0.38h G b h X x r(x) 1 S(x) = πr(x) 2 a,b, h,π](/thumbs/101/149329485.jpg "1. 4cm 16 cm 4cm 20cm 18 cm L λ(x)=ax [kg/m] A x 4cm A 4cm 12 cm h h Y 0 a G 0.38h a b x r(x) x y = 1 h 0.38h G b h X x r(x) 1 S(x) = πr(x) 2 a,b, h,π") . 4cm 6 cm 4cm cm 8 cm λ()=a [kg/m] A 4cm A 4cm cm h h Y a G.38h a b () y = h.38h G b h X () S() = π() a,b, h,π V = ρ M = ρv G = M h S() 3 d a,b, h 4 G = 5 h a b a b = 6 ω() s v m θ() m v () θ() ω() dθ()
. 4cm 6 cm 4cm cm 8 cm λ()=a [kg/m] A 4cm A 4cm cm h h Y a G.38h a b () y = h.38h G b h X () S() = π() a,b, h,π V = ρ M = ρv G = M h S() 3 d a,b, h 4 G = 5 h a b a b = 6 ω() s v m θ() m v () θ() ω() dθ()
keisoku01.dvi
 2.,, Mon, 2006, 401, SAGA, JAPAN Dept. of Mechanical Engineering, Saga Univ., JAPAN 4 Mon, 2006, 401, SAGA, JAPAN Dept. of Mechanical Engineering, Saga Univ., JAPAN 5 Mon, 2006, 401, SAGA, JAPAN Dept.
2.,, Mon, 2006, 401, SAGA, JAPAN Dept. of Mechanical Engineering, Saga Univ., JAPAN 4 Mon, 2006, 401, SAGA, JAPAN Dept. of Mechanical Engineering, Saga Univ., JAPAN 5 Mon, 2006, 401, SAGA, JAPAN Dept.
δ ij δ ij ˆx ˆx ŷ ŷ ẑ ẑ 0, ˆx ŷ ŷ ˆx ẑ, ŷ ẑ ẑ ŷ ẑ, ẑ ˆx ˆx ẑ ŷ, a b a x ˆx + a y ŷ + a z ẑ b x ˆx + b
 23 2 2.1 n n r x, y, z ˆx ŷ ẑ 1 a a x ˆx + a y ŷ + a z ẑ 2.1.1 3 a iˆx i. 2.1.2 i1 i j k e x e y e z 3 a b a i b i i 1, 2, 3 x y z ˆx i ˆx j δ ij, 2.1.3 n a b a i b i a i b i a x b x + a y b y + a z b
23 2 2.1 n n r x, y, z ˆx ŷ ẑ 1 a a x ˆx + a y ŷ + a z ẑ 2.1.1 3 a iˆx i. 2.1.2 i1 i j k e x e y e z 3 a b a i b i i 1, 2, 3 x y z ˆx i ˆx j δ ij, 2.1.3 n a b a i b i a i b i a x b x + a y b y + a z b
画像処理工学
 画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
Microsoft PowerPoint - 9.pptx
 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 行列演算と写像 ( 次変換 3 拡大とスカラー倍 p ' = ( ', ' = ( k, kk p = (, k 倍 k 倍 拡大後 k 倍拡大の関係は スカラー倍を用いて次のように表現できる ' = k ' 拡大前 拡大 4 拡大と行列の積 p ' = ( ', '
9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 行列演算と写像 ( 次変換 3 拡大とスカラー倍 p ' = ( ', ' = ( k, kk p = (, k 倍 k 倍 拡大後 k 倍拡大の関係は スカラー倍を用いて次のように表現できる ' = k ' 拡大前 拡大 4 拡大と行列の積 p ' = ( ', '
さくらの個別指導 ( さくら教育研究所 ) A a 1 a 2 a 3 a n {a n } a 1 a n n n 1 n n 0 a n = 1 n 1 n n O n {a n } n a n α {a n } α {a
 A a 1 a 2 a 3 a n {a n } a 1 a n n n 1 n n 0 a n = 1 n 1 n n O n {a n } n a n α {a n } α {a") ... A a a a 3 a n {a n } a a n n 3 n n n 0 a n = n n n O 3 4 5 6 n {a n } n a n α {a n } α {a n } α α {a n } a n n a n α a n = α n n 0 n = 0 3 4. ()..0.00 + (0.) n () 0. 0.0 0.00 ( 0.) n 0 0 c c c c c
... A a a a 3 a n {a n } a a n n 3 n n n 0 a n = n n n O 3 4 5 6 n {a n } n a n α {a n } α {a n } α α {a n } a n n a n α a n = α n n 0 n = 0 3 4. ()..0.00 + (0.) n () 0. 0.0 0.00 ( 0.) n 0 0 c c c c c
68 A mm 1/10 A. (a) (b) A.: (a) A.3 A.4 1 1
 (b) A.: (a) A.3 A.4 1 1") 67 A Section A.1 0 1 0 1 Balmer 7 9 1 0.1 0.01 1 9 3 10:09 6 A.1: A.1 1 10 9 68 A 10 9 10 9 1 10 9 10 1 mm 1/10 A. (a) (b) A.: (a) A.3 A.4 1 1 A.1. 69 5 1 10 15 3 40 0 0 ¾ ¾ É f Á ½ j 30 A.3: A.4: 1/10
67 A Section A.1 0 1 0 1 Balmer 7 9 1 0.1 0.01 1 9 3 10:09 6 A.1: A.1 1 10 9 68 A 10 9 10 9 1 10 9 10 1 mm 1/10 A. (a) (b) A.: (a) A.3 A.4 1 1 A.1. 69 5 1 10 15 3 40 0 0 ¾ ¾ É f Á ½ j 30 A.3: A.4: 1/10
第 4 週コンボリューションその 2, 正弦波による分解 教科書 p. 16~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問 1. 以下の図にならって,1 と 2 の δ 関数を図示せよ δ (t) 2
 2") 第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
 1 3 1.1.......................... 3 1............................... 3 1.3....................... 5 1.4.......................... 6 1.5........................ 7 8.1......................... 8..............................
1 3 1.1.......................... 3 1............................... 3 1.3....................... 5 1.4.......................... 6 1.5........................ 7 8.1......................... 8..............................
6 2 2 x y x y t P P = P t P = I P P P ( ) ( ) ,, ( ) ( ) cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ y x θ x θ P
 ( ) ,, ( ) ( ) cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ y x θ x θ P") 6 x x 6.1 t P P = P t P = I P P P 1 0 1 0,, 0 1 0 1 cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ x θ x θ P x P x, P ) = t P x)p ) = t x t P P ) = t x = x, ) 6.1) x = Figure 6.1 Px = x, P=, θ = θ P
6 x x 6.1 t P P = P t P = I P P P 1 0 1 0,, 0 1 0 1 cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ x θ x θ P x P x, P ) = t P x)p ) = t x t P P ) = t x = x, ) 6.1) x = Figure 6.1 Px = x, P=, θ = θ P
空間光変調器を用いた擬似振幅変調ホログラムによる光の空間モード変換 1. 研究目的 宮本研究室北谷拓磨 本研究は 中心に近づく程回折効率が小さくなるホログラムを作製し 空間光変調器 (spatial light modulator SLM) を用いて 1 次のラゲールガウスビーム (LG ビーム )
 を用いて 1 次のラゲールガウスビーム (LG ビーム )") 空間光変調器を用いた擬似振幅変調ホログラムによる光の空間モード変換 1. 研究目的 宮本研究室北谷拓磨 本研究は 中心に近づく程回折効率が小さくなるホログラムを作製し 空間光変調器 (spatial light modulator SLM) を用いて 1 次のラゲールガウスビーム (LG ビーム ) を正確に発生させることを目的とする このようなホログラムはまた 光子の軌道角運動量状態および軌道角運動量重ね合わせ状態の柔軟な検出及び操作を実現することが期待される
空間光変調器を用いた擬似振幅変調ホログラムによる光の空間モード変換 1. 研究目的 宮本研究室北谷拓磨 本研究は 中心に近づく程回折効率が小さくなるホログラムを作製し 空間光変調器 (spatial light modulator SLM) を用いて 1 次のラゲールガウスビーム (LG ビーム ) を正確に発生させることを目的とする このようなホログラムはまた 光子の軌道角運動量状態および軌道角運動量重ね合わせ状態の柔軟な検出及び操作を実現することが期待される
<4D F736F F D DC58F498D5A814091E6318FCD814089E6919C82C682CD89BD82A92E646F63>
 第 1 章画像とは何か 第 1 章画像とは何か 画像 は英語では image であり 実際に存在する もの を 絵に描いたり カメラで撮影したりしたものである キャンバス フィルム 印画紙などに記録されて 現物が破壊されるなどで存在しなくなっても 遠方にあって直接見ることが不可能であっても 保存 伝送されていつでも どこでも自由に見ることが可能となる 本書で述べる 画像処理 はこの画像を入力とした処理である
第 1 章画像とは何か 第 1 章画像とは何か 画像 は英語では image であり 実際に存在する もの を 絵に描いたり カメラで撮影したりしたものである キャンバス フィルム 印画紙などに記録されて 現物が破壊されるなどで存在しなくなっても 遠方にあって直接見ることが不可能であっても 保存 伝送されていつでも どこでも自由に見ることが可能となる 本書で述べる 画像処理 はこの画像を入力とした処理である
4 4 4 a b c d a b A c d A a da ad bce O E O n A n O ad bc a d n A n O 5 {a n } S n a k n a n + k S n a a n+ S n n S n n log x x {xy } x, y x + y 7 fx
 4 4 5 4 I II III A B C, 5 7 I II A B,, 8, 9 I II A B O A,, Bb, b, Cc, c, c b c b b c c c OA BC P BC OP BC P AP BC n f n x xn e x! e n! n f n x f n x f n x f k x k 4 e > f n x dx k k! fx sin x cos x tan
4 4 5 4 I II III A B C, 5 7 I II A B,, 8, 9 I II A B O A,, Bb, b, Cc, c, c b c b b c c c OA BC P BC OP BC P AP BC n f n x xn e x! e n! n f n x f n x f n x f k x k 4 e > f n x dx k k! fx sin x cos x tan
高等学校学習指導要領解説 数学編
 5 10 15 20 25 30 35 5 1 1 10 1 1 2 4 16 15 18 18 18 19 19 20 19 19 20 1 20 2 22 25 3 23 4 24 5 26 28 28 30 28 28 1 28 2 30 3 31 35 4 33 5 34 36 36 36 40 36 1 36 2 39 3 41 4 42 45 45 45 46 5 1 46 2 48 3
5 10 15 20 25 30 35 5 1 1 10 1 1 2 4 16 15 18 18 18 19 19 20 19 19 20 1 20 2 22 25 3 23 4 24 5 26 28 28 30 28 28 1 28 2 30 3 31 35 4 33 5 34 36 36 36 40 36 1 36 2 39 3 41 4 42 45 45 45 46 5 1 46 2 48 3
l l l
 l l l l l l l l l l l l l l l l l l l l l l l l l l データ処理の流れ l データ取得 撮像 観測機器でデータを取得 l 輝度較正 生データへの値付け 物 理量に変換 l 幾何補正 画像座標と幾何条件 対 象の地理座標など の対 応付け l 解析 具体的な情報の読み取り はやぶさ搭載カメラ AMICA 別名ONC-T l l l l l l l l
l l l l l l l l l l l l l l l l l l l l l l l l l l データ処理の流れ l データ取得 撮像 観測機器でデータを取得 l 輝度較正 生データへの値付け 物 理量に変換 l 幾何補正 画像座標と幾何条件 対 象の地理座標など の対 応付け l 解析 具体的な情報の読み取り はやぶさ搭載カメラ AMICA 別名ONC-T l l l l l l l l
応用数学A
 応用数学 A 米田 戸倉川月 7 限 1930~2100 西 5-109 V を :x 2 + y 2 + z 2 = 4 で囲まれる内部とする F = ye x xe y + ze z FdV = V e x e y e z F = = 2e z 2e z dv = 2e z 3 23 = 64π 3 e z y x z 4π V n Fd = 1 F nd 2 F nd 法線ベクトル n g x,
応用数学 A 米田 戸倉川月 7 限 1930~2100 西 5-109 V を :x 2 + y 2 + z 2 = 4 で囲まれる内部とする F = ye x xe y + ze z FdV = V e x e y e z F = = 2e z 2e z dv = 2e z 3 23 = 64π 3 e z y x z 4π V n Fd = 1 F nd 2 F nd 法線ベクトル n g x,
図 5 一次微分 図 6 コントラスト変化に伴う微分プロファイルの変化 価し, 合否判定を行う. 3. エッジ検出の原理ここでは, 一般的なエッジ検出の処理内容と, それぞれの処理におけるパラメータについて述べる. 3.1 濃度投影検出線と直交する方向に各画素をスキャンし, その濃度平均値を検出線上
 The Principles of Edge Detection, and Its Application to Image Measurement/ Junichi SUGANO ヴィスコ テクノロジーズ株式会社開発本部研究部菅野純一 1. はじめに画像処理におけるエッジとは, 対象物と背景の境界点を指しており, この境界点が連なることで対象物の輪郭を形成する. 対象物の輪郭を拡大してみると, レンズボケにより明から暗または暗から明へ濃度値が連続的に変化していることがわかる.
The Principles of Edge Detection, and Its Application to Image Measurement/ Junichi SUGANO ヴィスコ テクノロジーズ株式会社開発本部研究部菅野純一 1. はじめに画像処理におけるエッジとは, 対象物と背景の境界点を指しており, この境界点が連なることで対象物の輪郭を形成する. 対象物の輪郭を拡大してみると, レンズボケにより明から暗または暗から明へ濃度値が連続的に変化していることがわかる.
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
画像類似度測定の初歩的な手法の検証
 画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
(1.2) T D = 0 T = D = 30 kn 1.2 (1.4) 2F W = 0 F = W/2 = 300 kn/2 = 150 kn 1.3 (1.9) R = W 1 + W 2 = = 1100 N. (1.9) W 2 b W 1 a = 0
 T D = 0 T = D = 30 kn 1.2 (1.4) 2F W = 0 F = W/2 = 300 kn/2 = 150 kn 1.3 (1.9) R = W 1 + W 2 = = 1100 N. (1.9) W 2 b W 1 a = 0") 1 1 1.1 1.) T D = T = D = kn 1. 1.4) F W = F = W/ = kn/ = 15 kn 1. 1.9) R = W 1 + W = 6 + 5 = 11 N. 1.9) W b W 1 a = a = W /W 1 )b = 5/6) = 5 cm 1.4 AB AC P 1, P x, y x, y y x 1.4.) P sin 6 + P 1 sin 45
1 1 1.1 1.) T D = T = D = kn 1. 1.4) F W = F = W/ = kn/ = 15 kn 1. 1.9) R = W 1 + W = 6 + 5 = 11 N. 1.9) W b W 1 a = a = W /W 1 )b = 5/6) = 5 cm 1.4 AB AC P 1, P x, y x, y y x 1.4.) P sin 6 + P 1 sin 45

画像解析
 情報工学総合演習 画像解析 久野義徳 小林貴訓 福田悠人 I. 概要画像解析は, 見つける 数える 形を測る 識別する 記号 文字を読む など複雑かつ多様な 作業を画像処理により実現する技術であり, 自然観測 生産現場 医療をはじめ様々な分野で利用されて いる. 本テーマではまず, 演習として顕微鏡で観察した粒子画像を用いた粒子の計数, 及び形状特徴の計測を 行う. その後, 画像中から指定物体を検出
情報工学総合演習 画像解析 久野義徳 小林貴訓 福田悠人 I. 概要画像解析は, 見つける 数える 形を測る 識別する 記号 文字を読む など複雑かつ多様な 作業を画像処理により実現する技術であり, 自然観測 生産現場 医療をはじめ様々な分野で利用されて いる. 本テーマではまず, 演習として顕微鏡で観察した粒子画像を用いた粒子の計数, 及び形状特徴の計測を 行う. その後, 画像中から指定物体を検出
Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]
![Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]](/thumbs/94/121508518.jpg "Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]") 22 年国家試験解答 1,5 フーリエ変換は線形変換 FFT はデータ数に 2 の累乗数を要求するが DFT は任意のデータ数に対応 123I-IMP Brain SPECT FBP with Ramp filter 123I-IMP Brain SPECT FBP with Shepp&Logan filter 99mTc-MIBI Myocardial SPECT における ストリークアーチファクト
22 年国家試験解答 1,5 フーリエ変換は線形変換 FFT はデータ数に 2 の累乗数を要求するが DFT は任意のデータ数に対応 123I-IMP Brain SPECT FBP with Ramp filter 123I-IMP Brain SPECT FBP with Shepp&Logan filter 99mTc-MIBI Myocardial SPECT における ストリークアーチファクト
 ( ) 2002 1 1 1 1.1....................................... 1 1.1.1................................. 1 1.1.2................................. 1 1.1.3................... 3 1.1.4......................................
( ) 2002 1 1 1 1.1....................................... 1 1.1.1................................. 1 1.1.2................................. 1 1.1.3................... 3 1.1.4......................................
Chap2.key
 . f( ) V (V V ) V e + V e V V V V ( ) V V ( ) E. - () V (0 ) () V (0 ) () V (0 ) (4) V ( ) E. - () V (0 ) () V (0 ) O r θ ( ) ( ) : (r θ) : { r cos θ r sn θ { r + () V (0 ) (4) V ( ) θ θ arg( ) : π π
. f( ) V (V V ) V e + V e V V V V ( ) V V ( ) E. - () V (0 ) () V (0 ) () V (0 ) (4) V ( ) E. - () V (0 ) () V (0 ) O r θ ( ) ( ) : (r θ) : { r cos θ r sn θ { r + () V (0 ) (4) V ( ) θ θ arg( ) : π π
13章 回帰分析
 単回帰分析 つ以上の変数についての関係を見る つの 目的 被説明 変数を その他の 説明 変数を使って 予測しようというものである 因果関係とは限らない ここで勉強すること 最小 乗法と回帰直線 決定係数とは何か? 最小 乗法と回帰直線 これまで 変数の間の関係の深さについて考えてきた 相関係数 ここでは 変数に役割を与え 一方の 説明 変数を用いて他方の 目的 被説明 変数を説明することを考える
単回帰分析 つ以上の変数についての関係を見る つの 目的 被説明 変数を その他の 説明 変数を使って 予測しようというものである 因果関係とは限らない ここで勉強すること 最小 乗法と回帰直線 決定係数とは何か? 最小 乗法と回帰直線 これまで 変数の間の関係の深さについて考えてきた 相関係数 ここでは 変数に役割を与え 一方の 説明 変数を用いて他方の 目的 被説明 変数を説明することを考える
A
 A04-164 2008 2 13 1 4 1.1.......................................... 4 1.2..................................... 4 1.3..................................... 4 1.4..................................... 5 2
A04-164 2008 2 13 1 4 1.1.......................................... 4 1.2..................................... 4 1.3..................................... 4 1.4..................................... 5 2
Microsoft PowerPoint - 9.pptx
 9/7/8( 水 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 拡大とスカラー倍 行列演算と写像 ( 次変換 拡大後 k 倍 k 倍 k 倍拡大の関係は スカラー倍を用いて次のように表現できる p = (, ' = k ' 拡大前 p ' = ( ', ' = ( k, k 拡大 4 拡大と行列の積 拡大後 k 倍
9/7/8( 水 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 拡大とスカラー倍 行列演算と写像 ( 次変換 拡大後 k 倍 k 倍 k 倍拡大の関係は スカラー倍を用いて次のように表現できる p = (, ' = k ' 拡大前 p ' = ( ', ' = ( k, k 拡大 4 拡大と行列の積 拡大後 k 倍
2 2 1?? 2 1 1, 2 1, 2 1, 2, 3,... 1, 2 1, 3? , 2 2, 3? k, l m, n k, l m, n kn > ml...? 2 m, n n m
 2009 IA I 22, 23, 24, 25, 26, 27 4 21 1 1 2 1! 4, 5 1? 50 1 2 1 1 2 1 4 2 2 2 1?? 2 1 1, 2 1, 2 1, 2, 3,... 1, 2 1, 3? 2 1 3 1 2 1 1, 2 2, 3? 2 1 3 2 3 2 k, l m, n k, l m, n kn > ml...? 2 m, n n m 3 2
2009 IA I 22, 23, 24, 25, 26, 27 4 21 1 1 2 1! 4, 5 1? 50 1 2 1 1 2 1 4 2 2 2 1?? 2 1 1, 2 1, 2 1, 2, 3,... 1, 2 1, 3? 2 1 3 1 2 1 1, 2 2, 3? 2 1 3 2 3 2 k, l m, n k, l m, n kn > ml...? 2 m, n n m 3 2
18 ( ) I II III A B C(100 ) 1, 2, 3, 5 I II A B (100 ) 1, 2, 3 I II A B (80 ) 6 8 I II III A B C(80 ) 1 n (1 + x) n (1) n C 1 + n C
 I II III A B C(100 ) 1, 2, 3, 5 I II A B (100 ) 1, 2, 3 I II A B (80 ) 6 8 I II III A B C(80 ) 1 n (1 + x) n (1) n C 1 + n C") 8 ( ) 8 5 4 I II III A B C( ),,, 5 I II A B ( ),, I II A B (8 ) 6 8 I II III A B C(8 ) n ( + x) n () n C + n C + + n C n = 7 n () 7 9 C : y = x x A(, 6) () A C () C P AP Q () () () 4 A(,, ) B(,, ) C(,,
8 ( ) 8 5 4 I II III A B C( ),,, 5 I II A B ( ),, I II A B (8 ) 6 8 I II III A B C(8 ) n ( + x) n () n C + n C + + n C n = 7 n () 7 9 C : y = x x A(, 6) () A C () C P AP Q () () () 4 A(,, ) B(,, ) C(,,
II Karel Švadlenka * [1] 1.1* 5 23 m d2 x dt 2 = cdx kx + mg dt. c, g, k, m 1.2* u = au + bv v = cu + dv v u a, b, c, d R
![II Karel Švadlenka * [1] 1.1* 5 23 m d2 x dt 2 = cdx kx + mg dt. c, g, k, m 1.2* u = au + bv v = cu + dv v u a, b, c, d R](/thumbs/95/125540821.jpg "II Karel Švadlenka * [1] 1.1* 5 23 m d2 x dt 2 = cdx kx + mg dt. c, g, k, m 1.2* u = au + bv v = cu + dv v u a, b, c, d R") II Karel Švadlenka 2018 5 26 * [1] 1.1* 5 23 m d2 x dt 2 = cdx kx + mg dt. c, g, k, m 1.2* 5 23 1 u = au + bv v = cu + dv v u a, b, c, d R 1.3 14 14 60% 1.4 5 23 a, b R a 2 4b < 0 λ 2 + aλ + b = 0 λ =
II Karel Švadlenka 2018 5 26 * [1] 1.1* 5 23 m d2 x dt 2 = cdx kx + mg dt. c, g, k, m 1.2* 5 23 1 u = au + bv v = cu + dv v u a, b, c, d R 1.3 14 14 60% 1.4 5 23 a, b R a 2 4b < 0 λ 2 + aλ + b = 0 λ =
II ( ) (7/31) II ( [ (3.4)] Navier Stokes [ (6/29)] Navier Stokes 3 [ (6/19)] Re
![II ( ) (7/31) II ( [ (3.4)] Navier Stokes [ (6/29)] Navier Stokes 3 [ (6/19)] Re](/thumbs/94/118770263.jpg "II ( ) (7/31) II ( [ (3.4)] Navier Stokes [ (6/29)] Navier Stokes 3 [ (6/19)] Re") II 29 7 29-7-27 ( ) (7/31) II (http://www.damp.tottori-u.ac.jp/~ooshida/edu/fluid/) [ (3.4)] Navier Stokes [ (6/29)] Navier Stokes 3 [ (6/19)] Reynolds [ (4.6), (45.8)] [ p.186] Navier Stokes I Euler Navier
II 29 7 29-7-27 ( ) (7/31) II (http://www.damp.tottori-u.ac.jp/~ooshida/edu/fluid/) [ (3.4)] Navier Stokes [ (6/29)] Navier Stokes 3 [ (6/19)] Reynolds [ (4.6), (45.8)] [ p.186] Navier Stokes I Euler Navier
ii 3.,. 4. F. (), ,,. 8.,. 1. (75% ) (25% ) =9 7, =9 8 (. ). 1.,, (). 3.,. 1. ( ).,.,.,.,.,. ( ) (1 2 )., ( ), 0. 2., 1., 0,.
, ,,. 8.,. 1. (75% ) (25% ) =9 7, =9 8 (. ). 1.,, (). 3.,. 1. ( ).,.,.,.,.,. ( ) (1 2 )., ( ), 0. 2., 1., 0,.") 23(2011) (1 C104) 5 11 (2 C206) 5 12 http://www.math.is.tohoku.ac.jp/~obata,.,,,.. 1. 2. 3. 4. 5. 6. 7.,,. 1., 2007 ( ). 2. P. G. Hoel, 1995. 3... 1... 2.,,. ii 3.,. 4. F. (),.. 5.. 6.. 7.,,. 8.,. 1. (75%
23(2011) (1 C104) 5 11 (2 C206) 5 12 http://www.math.is.tohoku.ac.jp/~obata,.,,,.. 1. 2. 3. 4. 5. 6. 7.,,. 1., 2007 ( ). 2. P. G. Hoel, 1995. 3... 1... 2.,,. ii 3.,. 4. F. (),.. 5.. 6.. 7.,,. 8.,. 1. (75%
1 12 ( )150 ( ( ) ) x M x 0 1 M 2 5x 2 + 4x + 3 x 2 1 M x M 2 1 M x (x + 1) 2 (1) x 2 + x + 1 M (2) 1 3 M (3) x 4 +
150 ( ( ) ) x M x 0 1 M 2 5x 2 + 4x + 3 x 2 1 M x M 2 1 M x (x + 1) 2 (1) x 2 + x + 1 M (2) 1 3 M (3) x 4 +") ( )5 ( ( ) ) 4 6 7 9 M M 5 + 4 + M + M M + ( + ) () + + M () M () 4 + + M a b y = a + b a > () a b () y V a () V a b V n f() = n k= k k () < f() = log( ) t dt log () n+ (i) dt t (n + ) (ii) < t dt n+ n
( )5 ( ( ) ) 4 6 7 9 M M 5 + 4 + M + M M + ( + ) () + + M () M () 4 + + M a b y = a + b a > () a b () y V a () V a b V n f() = n k= k k () < f() = log( ) t dt log () n+ (i) dt t (n + ) (ii) < t dt n+ n
カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
vecrot
 1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1
![1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1](/thumbs/94/121802164.jpg "1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1") 1 I 1.1 ± e = = - =1.602 10 19 C C MKA [m], [Kg] [s] [A] 1C 1A 1 MKA 1C 1C +q q +q q 1 1.1 r 1,2 q 1, q 2 r 12 2 q 1, q 2 2 F 12 = k q 1q 2 r 12 2 (1.1) k 2 k 2 ( r 1 r 2 ) ( r 2 r 1 ) q 1 q 2 (q 1 q 2
1 I 1.1 ± e = = - =1.602 10 19 C C MKA [m], [Kg] [s] [A] 1C 1A 1 MKA 1C 1C +q q +q q 1 1.1 r 1,2 q 1, q 2 r 12 2 q 1, q 2 2 F 12 = k q 1q 2 r 12 2 (1.1) k 2 k 2 ( r 1 r 2 ) ( r 2 r 1 ) q 1 q 2 (q 1 q 2
85 4
 85 4 86 Copright c 005 Kumanekosha 4.1 ( ) ( t ) t, t 4.1.1 t Step! (Step 1) (, 0) (Step ) ±V t (, t) I Check! P P V t π 54 t = 0 + V (, t) π θ : = θ : π ) θ = π ± sin ± cos t = 0 (, 0) = sin π V + t +V
85 4 86 Copright c 005 Kumanekosha 4.1 ( ) ( t ) t, t 4.1.1 t Step! (Step 1) (, 0) (Step ) ±V t (, t) I Check! P P V t π 54 t = 0 + V (, t) π θ : = θ : π ) θ = π ± sin ± cos t = 0 (, 0) = sin π V + t +V
Part () () Γ Part ,
 () Γ Part ,") Contents a 6 6 6 6 6 6 6 7 7. 8.. 8.. 8.3. 8 Part. 9. 9.. 9.. 3. 3.. 3.. 3 4. 5 4.. 5 4.. 9 4.3. 3 Part. 6 5. () 6 5.. () 7 5.. 9 5.3. Γ 3 6. 3 6.. 3 6.. 3 6.3. 33 Part 3. 34 7. 34 7.. 34 7.. 34 8. 35
Contents a 6 6 6 6 6 6 6 7 7. 8.. 8.. 8.3. 8 Part. 9. 9.. 9.. 3. 3.. 3.. 3 4. 5 4.. 5 4.. 9 4.3. 3 Part. 6 5. () 6 5.. () 7 5.. 9 5.3. Γ 3 6. 3 6.. 3 6.. 3 6.3. 33 Part 3. 34 7. 34 7.. 34 7.. 34 8. 35
[1.1] r 1 =10e j(ωt+π/4), r 2 =5e j(ωt+π/3), r 3 =3e j(ωt+π/6) ~r = ~r 1 + ~r 2 + ~r 3 = re j(ωt+φ) =(10e π 4 j +5e π 3 j +3e π 6 j )e jωt
![[1.1] r 1 =10e j(ωt+π/4), r 2 =5e j(ωt+π/3), r 3 =3e j(ωt+π/6) ~r = ~r 1 + ~r 2 + ~r 3 = re j(ωt+φ) =(10e π 4 j +5e π 3 j +3e π 6 j )e jωt](/thumbs/101/152334931.jpg "[1.1] r 1 =10e j(ωt+π/4), r 2 =5e j(ωt+π/3), r 3 =3e j(ωt+π/6) ~r = ~r 1 + ~r 2 + ~r 3 = re j(ωt+φ) =(10e π 4 j +5e π 3 j +3e π 6 j )e jωt") 3.4.7 [.] =e j(t+/4), =5e j(t+/3), 3 =3e j(t+/6) ~ = ~ + ~ + ~ 3 = e j(t+φ) =(e 4 j +5e 3 j +3e 6 j )e jt = e jφ e jt cos φ =cos 4 +5cos 3 +3cos 6 =.69 sin φ =sin 4 +5sin 3 +3sin 6 =.9 =.69 +.9 =7.74 [.]
3.4.7 [.] =e j(t+/4), =5e j(t+/3), 3 =3e j(t+/6) ~ = ~ + ~ + ~ 3 = e j(t+φ) =(e 4 j +5e 3 j +3e 6 j )e jt = e jφ e jt cos φ =cos 4 +5cos 3 +3cos 6 =.69 sin φ =sin 4 +5sin 3 +3sin 6 =.9 =.69 +.9 =7.74 [.]
<4D F736F F D20824F F6490CF95AA82C696CA90CF95AA2E646F63>
 1/15 平成 3 年 3 月 4 日午後 6 時 49 分 5 ベクトルの 重積分と面積分 5 重積分と面積分 Ⅰ. 重積分 と で 回積分することを 重積分 といいます この 重積分は何を意味しているのでしょう? 通常の積分 (1 重積分 ) では C d 図 1a 1 f d (5.1) 1 f d f ( ) は 図形的には図 1a のように面積を表しています つまり 1 f ( ) を高さとしてプロットすると図
1/15 平成 3 年 3 月 4 日午後 6 時 49 分 5 ベクトルの 重積分と面積分 5 重積分と面積分 Ⅰ. 重積分 と で 回積分することを 重積分 といいます この 重積分は何を意味しているのでしょう? 通常の積分 (1 重積分 ) では C d 図 1a 1 f d (5.1) 1 f d f ( ) は 図形的には図 1a のように面積を表しています つまり 1 f ( ) を高さとしてプロットすると図
) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8)
 a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8)") 4 4 ) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8) a b a b = 6i j 4 b c b c 9) a b = 4 a b) c = 7
4 4 ) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8) a b a b = 6i j 4 b c b c 9) a b = 4 a b) c = 7
No2 4 y =sinx (5) y = p sin(2x +3) (6) y = 1 tan(3x 2) (7) y =cos 2 (4x +5) (8) y = cos x 1+sinx 5 (1) y =sinx cos x 6 f(x) = sin(sin x) f 0 (π) (2) y
 y = p sin(2x +3) (6) y = 1 tan(3x 2) (7) y =cos 2 (4x +5) (8) y = cos x 1+sinx 5 (1) y =sinx cos x 6 f(x) = sin(sin x) f 0 (π) (2) y") No1 1 (1) 2 f(x) =1+x + x 2 + + x n, g(x) = 1 (n +1)xn + nx n+1 (1 x) 2 x 6= 1 f 0 (x) =g(x) y = f(x)g(x) y 0 = f 0 (x)g(x)+f(x)g 0 (x) 3 (1) y = x2 x +1 x (2) y = 1 g(x) y0 = g0 (x) {g(x)} 2 (2) y = µ
No1 1 (1) 2 f(x) =1+x + x 2 + + x n, g(x) = 1 (n +1)xn + nx n+1 (1 x) 2 x 6= 1 f 0 (x) =g(x) y = f(x)g(x) y 0 = f 0 (x)g(x)+f(x)g 0 (x) 3 (1) y = x2 x +1 x (2) y = 1 g(x) y0 = g0 (x) {g(x)} 2 (2) y = µ
N cos s s cos ψ e e e e 3 3 e e 3 e 3 e
 3 3 5 5 5 3 3 7 5 33 5 33 9 5 8 > e > f U f U u u > u ue u e u ue u ue u e u e u u e u u e u N cos s s cos ψ e e e e 3 3 e e 3 e 3 e 3 > A A > A E A f A A f A [ ] f A A e > > A e[ ] > f A E A < < f ; >
3 3 5 5 5 3 3 7 5 33 5 33 9 5 8 > e > f U f U u u > u ue u e u ue u ue u e u e u u e u u e u N cos s s cos ψ e e e e 3 3 e e 3 e 3 e 3 > A A > A E A f A A f A [ ] f A A e > > A e[ ] > f A E A < < f ; >
学習指導要領
 (1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 絶対値の意味を理解し適切な処理することができる 例題 1-3 の絶対値をはずせ 展開公式 ( a + b ) ( a - b ) = a 2 - b 2 を利用して根号を含む分数の分母を有理化することができる 例題 5 5 + 2 の分母を有理化せよ 実数の整数部分と小数部分の表し方を理解している
(1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 絶対値の意味を理解し適切な処理することができる 例題 1-3 の絶対値をはずせ 展開公式 ( a + b ) ( a - b ) = a 2 - b 2 を利用して根号を含む分数の分母を有理化することができる 例題 5 5 + 2 の分母を有理化せよ 実数の整数部分と小数部分の表し方を理解している
untitled
 9118 154 B-1 B-3 B- 5cm 3cm 5cm 3m18m5.4m.5m.66m1.3m 1.13m 1.134m 1.35m.665m 5 , 4 13 7 56 M 1586.1.18 7.77.9 599.5.8 7 1596.9.5 7.57.75 684.11.9 8.5 165..3 7.9 87.8.11 6.57. 166.6.16 7.57.6 856 6.6.5
9118 154 B-1 B-3 B- 5cm 3cm 5cm 3m18m5.4m.5m.66m1.3m 1.13m 1.134m 1.35m.665m 5 , 4 13 7 56 M 1586.1.18 7.77.9 599.5.8 7 1596.9.5 7.57.75 684.11.9 8.5 165..3 7.9 87.8.11 6.57. 166.6.16 7.57.6 856 6.6.5
R = Ar l B r l. A, B A, B.. r 2 R r = r2 [lar r l B r l2 ]=larl l B r l.2 r 2 R = [lar l l Br ] r r r = ll Ar l ll B = ll R rl.3 sin θ Θ = ll.4 Θsinθ
![R = Ar l B r l. A, B A, B.. r 2 R r = r2 [lar r l B r l2 ]=larl l B r l.2 r 2 R = [lar l l Br ] r r r = ll Ar l ll B = ll R rl.3 sin θ Θ = ll.4 Θsinθ](/thumbs/80/82073891.jpg "R = Ar l B r l. A, B A, B.. r 2 R r = r2 [lar r l B r l2 ]=larl l B r l.2 r 2 R = [lar l l Br ] r r r = ll Ar l ll B = ll R rl.3 sin θ Θ = ll.4 Θsinθ") .3.2 3.3.2 Spherical Coorinates.5: Laplace 2 V = r 2 r 2 x = r cos φ sin θ, y = r sin φ sin θ, z = r cos θ.93 r 2 sin θ sin θ θ θ r 2 sin 2 θ 2 V =.94 2.94 z V φ Laplace r 2 r 2 r 2 sin θ.96.95 V r 2 R
.3.2 3.3.2 Spherical Coorinates.5: Laplace 2 V = r 2 r 2 x = r cos φ sin θ, y = r sin φ sin θ, z = r cos θ.93 r 2 sin θ sin θ θ θ r 2 sin 2 θ 2 V =.94 2.94 z V φ Laplace r 2 r 2 r 2 sin θ.96.95 V r 2 R
Microsoft PowerPoint - qcomp.ppt [互換モード]
![Microsoft PowerPoint - qcomp.ppt [互換モード]](/thumbs/85/91243661.jpg "Microsoft PowerPoint - qcomp.ppt [互換モード]") 量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
( ) 2.1. C. (1) x 4 dx = 1 5 x5 + C 1 (2) x dx = x 2 dx = x 1 + C = 1 2 x + C xdx (3) = x dx = 3 x C (4) (x + 1) 3 dx = (x 3 + 3x 2 + 3x +
 2.1. C. (1) x 4 dx = 1 5 x5 + C 1 (2) x dx = x 2 dx = x 1 + C = 1 2 x + C xdx (3) = x dx = 3 x C (4) (x + 1) 3 dx = (x 3 + 3x 2 + 3x +") (.. C. ( d 5 5 + C ( d d + C + C d ( d + C ( ( + d ( + + + d + + + + C (5 9 + d + d tan + C cos (sin (6 sin d d log sin + C sin + (7 + + d ( + + + + d log( + + + C ( (8 d 7 6 d + 6 + C ( (9 ( d 6 + 8 d
(.. C. ( d 5 5 + C ( d d + C + C d ( d + C ( ( + d ( + + + d + + + + C (5 9 + d + d tan + C cos (sin (6 sin d d log sin + C sin + (7 + + d ( + + + + d log( + + + C ( (8 d 7 6 d + 6 + C ( (9 ( d 6 + 8 d
I-2 (100 ) (1) y(x) y dy dx y d2 y dx 2 (a) y + 2y 3y = 9e 2x (b) x 2 y 6y = 5x 4 (2) Bernoulli B n (n = 0, 1, 2,...) x e x 1 = n=0 B 0 B 1 B 2 (3) co
 (1) y(x) y dy dx y d2 y dx 2 (a) y + 2y 3y = 9e 2x (b) x 2 y 6y = 5x 4 (2) Bernoulli B n (n = 0, 1, 2,...) x e x 1 = n=0 B 0 B 1 B 2 (3) co") 16 I ( ) (1) I-1 I-2 I-3 (2) I-1 ( ) (100 ) 2l x x = 0 y t y(x, t) y(±l, t) = 0 m T g y(x, t) l y(x, t) c = 2 y(x, t) c 2 2 y(x, t) = g (A) t 2 x 2 T/m (1) y 0 (x) y 0 (x) = g c 2 (l2 x 2 ) (B) (2) (1)
16 I ( ) (1) I-1 I-2 I-3 (2) I-1 ( ) (100 ) 2l x x = 0 y t y(x, t) y(±l, t) = 0 m T g y(x, t) l y(x, t) c = 2 y(x, t) c 2 2 y(x, t) = g (A) t 2 x 2 T/m (1) y 0 (x) y 0 (x) = g c 2 (l2 x 2 ) (B) (2) (1)
0 スペクトル 時系列データの前処理 法 平滑化 ( スムージング ) と微分 明治大学理 学部応用化学科 データ化学 学研究室 弘昌
 と微分 明治大学理 学部応用化学科 データ化学 学研究室 弘昌") 0 スペクトル 時系列データの前処理 法 平滑化 ( スムージング ) と微分 明治大学理 学部応用化学科 データ化学 学研究室 弘昌 スペクトルデータの特徴 1 波 ( 波数 ) が近いと 吸光度 ( 強度 ) の値も似ている ノイズが含まれる 吸光度 ( 強度 ) の極大値 ( ピーク ) 以外のデータも重要 時系列データの特徴 2 時刻が近いと プロセス変数の値も似ている ノイズが含まれる プロセス変数の極大値
0 スペクトル 時系列データの前処理 法 平滑化 ( スムージング ) と微分 明治大学理 学部応用化学科 データ化学 学研究室 弘昌 スペクトルデータの特徴 1 波 ( 波数 ) が近いと 吸光度 ( 強度 ) の値も似ている ノイズが含まれる 吸光度 ( 強度 ) の極大値 ( ピーク ) 以外のデータも重要 時系列データの特徴 2 時刻が近いと プロセス変数の値も似ている ノイズが含まれる プロセス変数の極大値
Microsoft PowerPoint - 画像工学2007-5印刷用
 教室 : 4- NOVEMBER 6 画像工学 7 年度版 Imging Scinc nd Tchnolog 画像工学 7 年度版 5 慶応義塾大学理工学部 教授 中島真人 3. 画像のスペクトラム 3-. 画像のフーリエ変換と空間周波数の概念 3-. 簡単な図形のフーリエ変換 3-3. フーリエ変換の重要な性質 3-4. MTF と画像の評価 今週と来週は あまり面白くない. でも 後の講義を理解するために,
教室 : 4- NOVEMBER 6 画像工学 7 年度版 Imging Scinc nd Tchnolog 画像工学 7 年度版 5 慶応義塾大学理工学部 教授 中島真人 3. 画像のスペクトラム 3-. 画像のフーリエ変換と空間周波数の概念 3-. 簡単な図形のフーリエ変換 3-3. フーリエ変換の重要な性質 3-4. MTF と画像の評価 今週と来週は あまり面白くない. でも 後の講義を理解するために,
m dv = mg + kv2 dt m dv dt = mg k v v m dv dt = mg + kv2 α = mg k v = α 1 e rt 1 + e rt m dv dt = mg + kv2 dv mg + kv 2 = dt m dv α 2 + v 2 = k m dt d
 m v = mg + kv m v = mg k v v m v = mg + kv α = mg k v = α e rt + e rt m v = mg + kv v mg + kv = m v α + v = k m v (v α (v + α = k m ˆ ( v α ˆ αk v = m v + α ln v α v + α = αk m t + C v α v + α = e αk m
m v = mg + kv m v = mg k v v m v = mg + kv α = mg k v = α e rt + e rt m v = mg + kv v mg + kv = m v α + v = k m v (v α (v + α = k m ˆ ( v α ˆ αk v = m v + α ln v α v + α = αk m t + C v α v + α = e αk m
春期講座 ~ 極限 1 1, 1 2, 1 3, 1 4,, 1 n, n n {a n } n a n α {a n } α {a n } α lim n an = α n a n α α {a n } {a n } {a n } 1. a n = 2 n {a n } 2, 4, 8, 16,
 春期講座 ~ 極限 1 1, 1 2, 1 3, 1 4,, 1 n, n n {a n } n a n α {a n } α {a n } α lim an = α n a n α α {a n } {a n } {a n } 1. a n = 2 n {a n } 2, 4, 8, 16, 32, n a n {a n } {a n } 2. a n = 10n + 1 {a n } lim an
春期講座 ~ 極限 1 1, 1 2, 1 3, 1 4,, 1 n, n n {a n } n a n α {a n } α {a n } α lim an = α n a n α α {a n } {a n } {a n } 1. a n = 2 n {a n } 2, 4, 8, 16, 32, n a n {a n } {a n } 2. a n = 10n + 1 {a n } lim an
[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s
![[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s](/thumbs/94/118579915.jpg "[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s") [ ]. lim e 3 IC ) s49). y = e + ) ) y = / + ).3 d 4 ) e sin d 3) sin d ) s49) s493).4 z = y z z y s494).5 + y = 4 =.6 s495) dy = 3e ) d dy d = y s496).7 lim ) lim e s49).8 y = e sin ) y = sin e 3) y =
[ ]. lim e 3 IC ) s49). y = e + ) ) y = / + ).3 d 4 ) e sin d 3) sin d ) s49) s493).4 z = y z z y s494).5 + y = 4 =.6 s495) dy = 3e ) d dy d = y s496).7 lim ) lim e s49).8 y = e sin ) y = sin e 3) y =
Microsoft PowerPoint - presen
 解析支援ネット OKAYAMA 画像解析に関する技術講演会 2008.03.28 車上からの道路標識の認識 岡山県立大学情報工学部スポーツシステム工学科山内仁 はじめに 高度道路交通システム (ITS) VICS ETC etc. 走行支援道路システム (AHS) 車載カメラによる環境認識 (AHS-i) 道路標識の認識 認知に関わる事故の防止 2 車両運行に関わる標識 標識情報の取得手段 : 車載カメラ
解析支援ネット OKAYAMA 画像解析に関する技術講演会 2008.03.28 車上からの道路標識の認識 岡山県立大学情報工学部スポーツシステム工学科山内仁 はじめに 高度道路交通システム (ITS) VICS ETC etc. 走行支援道路システム (AHS) 車載カメラによる環境認識 (AHS-i) 道路標識の認識 認知に関わる事故の防止 2 車両運行に関わる標識 標識情報の取得手段 : 車載カメラ
tottori2013-print.key
 1 / 152 3 / 152 2 / 152 4 / 152 5 / 152 7 / 152 6 / 152 8 / 152 9 / 152 11 / 152 Red: [R,G,B] = [255,0,0] Yellow [R,G,B] = [255, 255, 0] Magenta [R,G,B] = [255, 0, 255] W [R,G,B] = [ Green: [R,G,B] = [0,
1 / 152 3 / 152 2 / 152 4 / 152 5 / 152 7 / 152 6 / 152 8 / 152 9 / 152 11 / 152 Red: [R,G,B] = [255,0,0] Yellow [R,G,B] = [255, 255, 0] Magenta [R,G,B] = [255, 0, 255] W [R,G,B] = [ Green: [R,G,B] = [0,
ii p ϕ x, t = C ϕ xe i ħ E t +C ϕ xe i ħ E t ψ x,t ψ x,t p79 やは時間変化しないことに注意 振動 粒子はだいたい このあたりにいる 粒子はだいたい このあたりにいる p35 D.3 Aψ Cϕdx = aψ ψ C Aϕ dx
 i B5 7.8. p89 4. ψ x, tψx, t = ψ R x, t iψ I x, t ψ R x, t + iψ I x, t = ψ R x, t + ψ I x, t p 5.8 π π π F e ix + F e ix + F 3 e 3ix F e ix + F e ix + F 3 e 3ix dx πψ x πψx p39 7. AX = X A [ a b c d x
i B5 7.8. p89 4. ψ x, tψx, t = ψ R x, t iψ I x, t ψ R x, t + iψ I x, t = ψ R x, t + ψ I x, t p 5.8 π π π F e ix + F e ix + F 3 e 3ix F e ix + F e ix + F 3 e 3ix dx πψ x πψx p39 7. AX = X A [ a b c d x
コンピュータグラフィックス第6回
 コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
3/4/8:9 { } { } β β β α β α β β
 α β : α β β α β α, [ ] [ ] V, [ ] α α β [ ] β 3/4/8:9 3/4/8:9 { } { } β β β α β α β β [] β [] β β β β α ( ( ( ( ( ( [ ] [ ] [ β ] [ α β β ] [ α ( β β ] [ α] [ ( β β ] [] α [ β β ] ( / α α [ β β ] [ ] 3
α β : α β β α β α, [ ] [ ] V, [ ] α α β [ ] β 3/4/8:9 3/4/8:9 { } { } β β β α β α β β [] β [] β β β β α ( ( ( ( ( ( [ ] [ ] [ β ] [ α β β ] [ α ( β β ] [ α] [ ( β β ] [] α [ β β ] ( / α α [ β β ] [ ] 3