マルチGNSS解析に関する技術指針
|
|
|
- あきお こやぎ
- 7 years ago
- Views:
Transcription
1 3.4. 観測スケジュール解析用データの取得に関するスケジュールは 表 13のとおりである 比較基線場のセッションH1 およびH2 に関しては 雨の影響による基線長の変化があるか不明であったため 同じ組み合わせによる観測を実施した 表 13 観測スケジュール一覧表 観測日 内 容 セッション ID 11 月 26 日 ( 月 ) 比較基線場 H1,H2 11 月 27 日 ( 火 ) 上空視界不良地域 F1,F2 11 月 29 日 ( 木 ) 2 周波スタティック 2S1,2S2 11 月 30 日 ( 金 ) 3 級 TS 観測 12 月 3 日 ( 月 ) 1 周波スタティック 1S1,1S2,1S3,1S4 12 月 4 日 ( 火 ) 比較基線場 H3,H4 12 月 5 日 ( 水 ) キネマティック K1,K2,K3,K4 12 月 6 日 ( 木 ) 比較基線場 H1,H2 4. RTKLIB を用いた基線解析 4.1. RTKLIBによる解析手法本業務で扱う解析プログラムは RTKLIB ver である プログラム開発者から各種変更のパッチプログラムが提供されており 本業務では rtklib_2.4.1_p7 で提供されているものを使用した 本業務の解析途中で 2 周波で解析するとき L2 波の中に L2C がある場合 異機種間では Float 解となる事例が生じた RTKLIB は L2C と L2P(Y) があった場合 L2C を優先して使用する仕様である そこで 受信機で取得したデータを RINEX 変換する段階で L2C を除外したデータを作成した このときに用いたプログラムは rtkconv_2.4.2b9 である TOPCON 受信機および Trimble 受信機から RINEX の変換は 国土地理院開発の BINEX2RINEX を用いて RINEXversion2.12 に変換し 解析を実施した また 解析の条件による差が生じないことを確認するために 全ての組み合わせで解析の設定を統一し 基線解析を実施した 3 RTKLIB は 東京海洋大学の高須知二氏が作成したオープンソースプログラムである URL



2 解析設定基線解析に用いた RTKLIB は 様々な手法やオプションを備えている 解析手法によっては Fix 率が大きく変わることがある 本業務では 解析手法を出来るだけ固定して基線解析を行うことにより それぞれの条件で解析された結果が解析手法の違いに左右されないように配慮し 解析を実施した 後処理で基線解析を行うソフトウェア名は RTKPOST である 本業務で共通の設定については 以下のとおりである なお オプション画面における Setting1 および Setting2 は 解析手法ごとに異なる 図 52 RTKPOST 初期画面 図 53 RTKPOST Output 画面 図 54 RTKPOST Statistics 画面 -29-


 解析設定 スタティック")

3 図 55 RTKPOST Positions 画面 図 56 RTKPOST Files 画面 スタティック 2 周波解析設定比較基線場の長基線解析は Static モードで 2 周波を使用して解析を実施した 基本的には rtkpost のデフォルト設定を用いている 平成 23 年度の報告では 長基線解析において Ionosphere Correction は Estimate STEC を選ぶと安定した解が得られていたが 今回の実験では 10km 程度の基線解析においては Fix 解が得られにくい結果となった そこで Ionosphere Correction は OFF を選択し Integer Ambiguity Resolution は Fix and Hold を選択した 図 57 スタティック長距離 (10km 以上 ) 解析設定 スタティック 2 周波解析が必要な電子基準点からの基線においては 基線長が 15km 程度であるため Ionosphere Correction を Estimate STEC にして解析を実施したが Fix 率が非常に良くなかったため 比較基線場と同じ設定にして 仰角 Mask や観測時間 サンプリング時間を変えて解析を実施した -30-
4 スタティック 1 周波解析設定 比較基線場の短距離基線解析は Static モードで 1 周波によって解析を実施した 基本 的には長距離基線解析と同じパラメータを用いて実施した 図 58 スタティック短距離 (10km 未満 ) 解析設定 上空視界不良地域以外の 10km 未満の基線については スタティック 1 周波のオプショ ンで解析を実施した 1 周波の解析には 比較的安定して Fix 解が得られた キネマティック解析設定キネマティックの解析には 各エポック解により独立性を持たせるため Integer Ambiguity Resolution は Continuous を選択し 解析を実施した 基本的なオプションは スタティック 1 周波と同じである 図 59 キネマティック解析設定 上空視界不良地域解析設定 上空視界不良地域の解析には 衛星配置による解の比較 評価が可能となるように キ -31-


5 ネマティックの解析手法にて解析を実施した 観測時間は 2 時間の 2 セッションである 図 60 上空視界不良地域 _ 解析設定 基線解析における留意点 1 RINEX データの作成 RINEX バージョンは version2.12 に変換する TOPCON 受信機および Trimble 受信機のデータは RINEX 変換ソフト BINEX2RINEX を用いる JAVAD 受信機のデータは RINEX 変換ソフト rtkconv_2.4.2b8 を用いる 2 周波スタティックに限っては 特殊な解析を実施するため RINEX データを rtkconv_2.4.2b8 に再度読み込ませ GPS の L2C がないデータを作成する 図 61 rtkconv を用いた RINEX 変換設定 -32-

6 図 62 rtkconv を用いた RINEX 変換設定 L2C 除外モード 2 Navigation データについてナビゲーションファイルは 表 14のとおりJAVAD 受信機で得られたNAVファイルを使用して解析を実施した 表 14 基線解析に使用したナビゲーションファイル 固定局受信機 移動局受信機 NAV ファイル JAVAD JAVAD,Trimble,TOPCON 固定局 Trimble,TOPCON JAVAD 移動局 Trimble,TOPCON Trimble,TOPCON 同じ時間帯の JAVAD 受信機 3 解析結果の保存について解析結果の保存については, オプションを変更しての解析が可能なように以下の項目に注意し, ファイル管理を実施した. 解析に使用した設定ファイル (conf ファイル ) は Elevation Mask や使用衛星のチェックの有無を除き 保存する rtkpost のオプションで Output - Output Solution Status / Debug Trace は Residual と Level4 を選択する 解析に使用したデータ (obs,nav,qnav,gnav,conf) 及び結果 (pos,pos.stat, pos.trace) は 1 つのフォルダに入れる. -33-
7 本業務におけるRTKLIB 採用値 1 スタティックの場合 RTKLIB で解析を実施すると 解析が行われたエポック毎に解が求まり その都度 Fix か否かの判定が出てくる 解析結果は 解析時間を反映し Fix 解の最終行の値を採用値として成果をまとめた また Fix 解が1つも得られない場合は 採用値ではないが検証のため最終行の値を参考データとして集計した 図 63 pos ファイルの例 2 キネマティックの場合キネマティックの解析では 10 エポックの平均を採用値とするが 任意の観測時間での 10 エポックの解析では 多くの解が Float 解となった 本業務では 1 分近い観測を実施していたため 全てのエポックにおいて continuous モードで解析を実施し その観測時間の中で最初に 10 エポックの Fix 解が連続的に得られたものを 当該基線の採用値とした また 衛星の配置により Fix と Float が不規則に起きて 連続 10 エポックの Fix 解が得られない場合は Fix 解が長く続く箇所を探して 採用値とした Float のみの基線は 解が得られないという記録にとどめた -34-
8 4.2. 解析種類基線解析は 全ての基線においてGPS,GPS+QZSS GPS+QZSS+GLONASSの 3 種類で比較するため 以下の本文では 表 15のとおり略称を定義する また 前述のとおりGPS 近代化に伴うL2Cコードを排除したデータを長距離基線に採用したため この記号をG として GPSの全信号を用いた場合と区別した 表 15 衛星システムの略称と表記 衛星測位システム システム名 略称 略表記 Global Positioning System GPS G GPS 近代化による L2C を排除したデータ G Global Navigation Satellite System GLONASS R Quasi-Zenith Satellite System QZSS J 4.3. 観測データの rtkplot による出図 観測で得られた全 RINEX ファイルを用いて rtkplot による出図を実施した 出力内容 は表 16 のとおり なお 出力結果については報告書付属資料に示す 表 16 RTKPLOT による出力内容 表示内容 標記 1 受信衛星総数 Sats/DOP ALL 2 スカイプロット L1+L2 Skyplot ALL 3 スカイプロット L1 Skyplot L1 4 スカイプロット L2 Skyplot L2 5 全衛星信号対雑音比 L1 L1 SNR ALL 6 全衛星信号対雑音比 L2 L2 SNR ALL 7 準天頂衛星信号対雑音比 L1 L1 SNR J1 8 準天頂衛星信号対雑音比 L2 L2 SNR J1 9 衛星番号別受信時間 L1+L2 Raw Obs ALL 10 衛星番号別受信時間 L1 Raw Obs L1 11 衛星番号別受信時間 L2 Raw Obs L2-35-
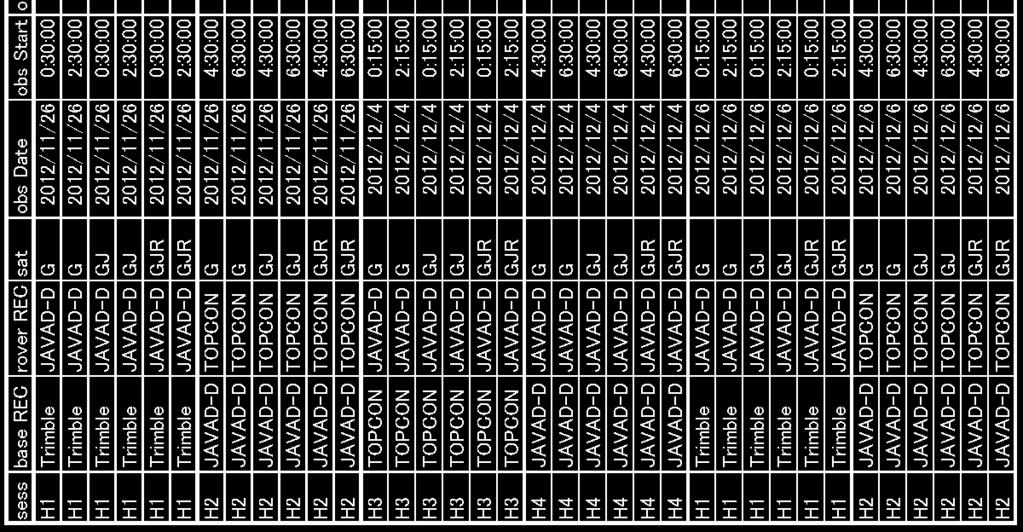
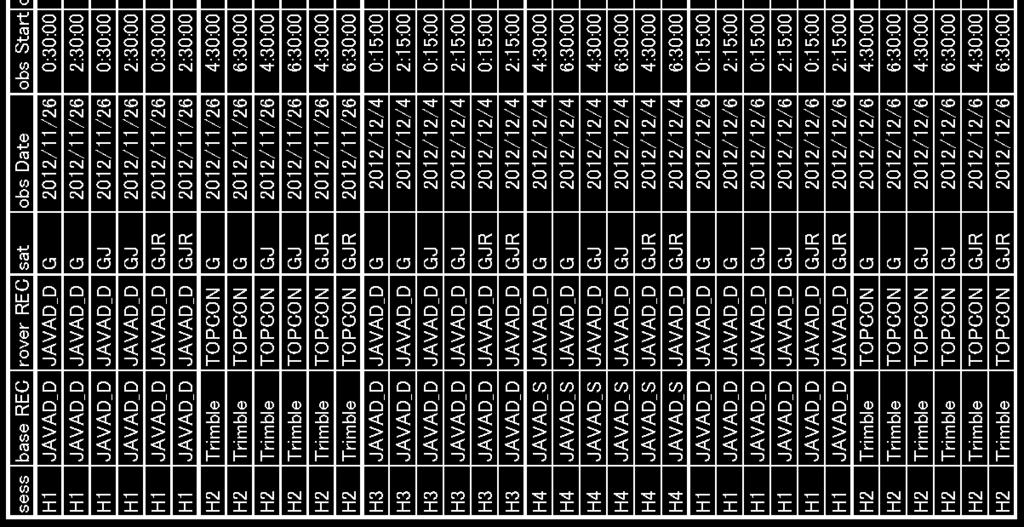
9 4.4. 網平均計算公共測量を模した 1 級 ~3 級基準点点間距離を基線解析し その点の座標を得るために用いた平均計算ソフトは 株式会社パスコ開発による PAG-U および KENQ である TS による点検座標の算出も PAG-U を用いて実施した 5. 解析結果と評価 5.1. 比較基線場におけるGNSS 観測比較基線場におけるGNSS 観測は 表 6のとおり 4 セッション (Session_ID:H1~H4) 実施した H1 およびH2 については 観測時に雨天であったため 気象の影響が考えられた その影響を確認するため 12 月 6 日に点検測量を実施した 各セッションでの観測時間および受信機情報を表 17に示す 本業務では 多くの解析用データを取得し解析を実施する必要があるため 受信機からRINEXファイルにする際 ファイル名を次のルールで設定して管理している RINEX ファイル名の例 H1_0001_331 セッション名 測点名 通算日 観測セッシ区分ョン名 比較基線場 H1 H2 H3 H4 表 17 比較基線場観測記録一覧表 点番号 点名 観測日 時刻 (UTC) 観測アンテナ高ファイル名通算日受信機名受信機番号開始終了時間 (m) RINEX Ver 高岡 No /11/ :22:00 3:46:00 3:24:00 Trimble 5135K H1_0001_ 高岡 No /11/ :16:30 3:45:00 3:28:30 JAVAD D H1_0002_ 高岡 No /11/ :25:30 3:55:30 3:30:00 JAVAD D H1_0010_ 国松 No /11/ :12:25 3:46:02 3:33:37 TOPCON H1_0013_ 高岡 No /12/ :51:15 3:30:26 3:39:11 Trimble 5135K H1_0001_ 高岡 No /12/ :51:30 3:30:30 3:39:00 JAVAD D H1_0002_ 高岡 No /12/ :03:30 3:30:30 3:27:00 JAVAD D H1_0010_ 国松 No /12/ :00:22 3:30:20 3:29:58 TOPCON H1_0013_ 高岡 No /11/ :27:30 7:51:30 3:24:00 JVAD D H2_0001_ 高岡 No /11/ :23:51 7:52:03 3:28:12 TOPCON H2_0002_ 高岡 No /11/ :11:00 7:59:45 3:48:45 Trimble 5135K H2_0010_ 国松 No /11/ :25:30 8:13:30 3:48:00 JAVAD D H2_0013_ 高岡 No /12/ :04:30 7:45:30 3:41:00 JVAD D H2_0001_ 高岡 No /12/ :04:37 7:45:29 3:40:52 TOPCON H2_0002_ 高岡 No /12/ :54:18 7:46:16 3:51:58 Trimble 5135K H2_0010_ 国松 No /12/ :00:30 7:45:00 3:44:30 JAVAD D H2_0013_ 高岡 No /12/ :01:27 3:31:30 3:30:03 TOPCON H3_0001_ 高岡 No /12/ :03:00 3:30:30 3:27:30 JAVAD D H3_0002_ 高岡 No /12/ :54:30 3:37:00 3:42:30 JAVAD D H3_0010_ 国松 No /12/ :00:30 3:30:15 3:29:45 Trimble 5135K H3_0013_ 高岡 No /12/ :16:00 7:54:30 3:38:30 JAVAD D H4_0001_ 高岡 No /12/ :15:30 7:53:30 3:38:00 JAVAD D H4_0002_ 高岡 No /12/ :12:30 7:45:00 3:32:30 JAVAD S H4_0010_ 国松 No /12/ :06:00 7:45:00 3:39:00 JAVAD D H4_0013_
10 つくば長距離 GNSS 比較基線場の成果は 平成 23 年 4 月 25 日 平成 23 年 5 月 2 日より採用と記載された成果表を使用し 解析及び成果の比較を実施した 比較基線場での観測は 4 箇所 ( 国松 No.13, 高岡 No.1, 高岡 No.2, 高岡 No.10) で実施した 比較基線場の成果は公表されている表 18および表 19に示すデータを使用して比較検討を実施した なお No.1~No.2 の短距離基線については 国土地理院で公表されていない成果である したがって 表 18から求めた計算値を用いて比較検討を行った 表 18 比較基線場成果表 (ITRF2005 座標系単位 :m) Name ID X Y Z No No No No 表 19 比較基線場成果基線ベクトルと基線長 ( 単位 :m) 基線 dx dy dz 距離 No.13~No No.13~No No.13~No No.10~No No.10~No No.1~No 長基線解析長基線解析は 国松 No.13 から高岡 No.1, 高岡 No.2, 高岡 No.10 の 3 基線である 基線解析結果を表 22から表 30に示す RTKLIBで解析された基線解析結果は posファイル ( テキストデータ ) で出力されるが 本業務では多くのデータ解析が必要であるため ファイル名を次のルールで管理した セッション名通算日高度角マスク データ取得時間 pos ファイル名の例 H1_0013_0001_331_G JR_15_30_3h 始点終点衛星 データ取得間隔 長基線解析では GPS の L2C を 入れた解析 と 入れない解析 を実施しており 同一セッションに同じ測辺を 6 種類解析している -37-
11 表 20 長距離基線における解析種類 種類 使用衛星 概要 1 G GPS 衛星のみを使用した解析 2 G L2C を除外した GPS を使用した解析 3 GJ GPS と準天頂衛星を使用した解析 4 G J L2C を除外した GPS と準天頂衛星を使用した解析 5 GJR GPS と準天頂衛星および GLONASS を使用した解析 6 G JR L2C を除外した GPS と準天頂衛星および GLONASS を使用した解析 解析結果の一覧表 ( 表番号 ) には 解析に使用した衛星数 Fix 解の基準衛星 Fix 解と比較基線場成果値との比較 ( NEU 成分 ) とRatio Float 解と比較基線場成果値との比較 ( NEU 成分 ) とRatio 3 時間データから得られたFix 数とFloat 数を集計し 掲載した 比較基線場成果値と比較した較差は 作業規程の準則 ( 付録 1 測量機器検定基準 )( 平成 23 年 3 月 31 日 ) における判定基準 ( 表 21 参照 ) を 許容範囲として区別した 解析結果の表に示す青文字は 成果との較差が許容範囲内である場合を表し 赤文字は 許容範囲を超えている場合として評価した 色が塗られているセルは データがない あるいは許容範囲を越えている箇所を示す 表 21 許容範囲の判定基準観測方法別性能基準判定項目スタティック法 短縮スタティック法 キネマティック法 RTK 法 ネットワーク型 RTK 法水平成分 N E の差 15mm 以内高さ成分 U の差 50mm 以内 解析結果は 解析時に作られるposファイルを基に集計している posファイルでは 図 64 のようにFixの判定であるが Fix 解の座標値が XYZ 全てにおいて 0 であるものがあった このような結果については 今回の集計結果にはFix 解やFloat 解にカウントしていない 図 64 pos ファイルにおける Fix 判定で解が得られないサンプル -38-

12 表 22 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.1_Mask15-39-


13 表 23 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.2_Mask15-40-

14 表 24 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.10_Mask15-41-

15 表 25 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.1_Mask30-42-


16 表 26 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.2_Mask30-43-
17 表 27 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.10_Mask30-44-


18 表 28 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.1_Mask45-45-


19 表 29 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.2_Mask45-46-

20 表 30 比較基線場 _ 長基線解析結果 _ 国松 No.13 高岡 No.10_Mask45-47-
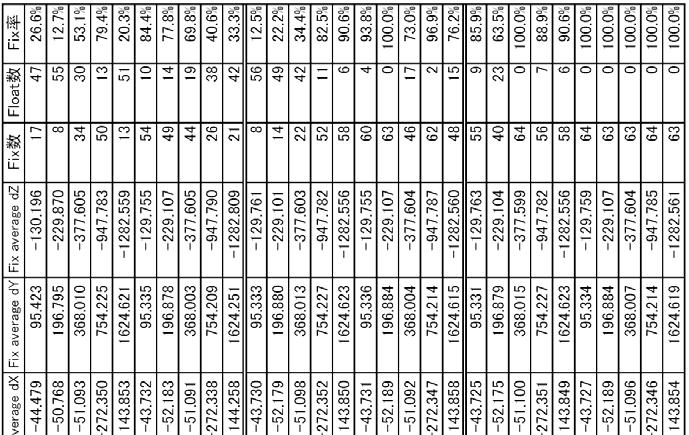
21 RTKLIB では Ratio が 3.0 より低い場合 Float 解の判定となるが Float 解の場合でも解は 比較基線場の成果に対して許容範囲に入っているものがある ただし Float 解の場合は Fix 解に比べて許容範囲を超えるものも多く 成果にばらつきがあり安定しない 比較基線場長基線解析結果は解析辺に対する Fix した辺の数は 50% 程度であり Fix 解が得られにくい解析結果となった また 受信機の組み合わせによる解析結果の違いは 同機種であれば Fix 解が得られる確率が高く 異機種の組み合わせでは Fix 解が得られないという傾向となった 今回の業務では 同機種が JAVAD 受信機のみであり Trimble 社製や TOPCON 社製の同機種観測は実施していない 高度角マスクの違いによる比較は マスクを少しずつ上げていくと 衛星数が減少し 当然の結果として Fix 解の数がやや少なくなる傾向がある 今回の解析データからは GLONASS 衛星を加えた場合 解析に用いる衛星数は増えるが Float 解になる傾向が見られた GPS に準天頂衛星を加えた解析では 大きな変化は見られない Fix 解については RTKLIBの解析手法やオプションの選択方法によって大きくFix 率が変化した 例として 長距離基線場 No.13~No.2 の基線において 解析によるFix 数および Float 数の違いを表 31に示す 表の中で示す1~3の解析手法の違いは以下の通りである 1 本業務で最終的に採用としたオプション設定で解析した結果である 2 Solution Type を Combined Ionosphere Correction を Broadcast Troposphere Correction を Saastamoinen に設定して解析を行ったものである 3 Solution Type を Forward Ionosphere Correction を Broadcast Troposphere Correction を Saastamoinen に設定して解析を行ったものである 表 31 解析のオプション設定による Fix 数の変化例 sess base REC rover REC sat obs Date obs Start obs End elv Fix 数 Float 数 Fix 数 Float 数 Fix 数 Float 数 H1 TOPCON JAVAD_D G 2012/11/26 0:30:00 3:30: H1 TOPCON JAVAD_D GJ 2012/11/26 0:30:00 3:30: H2 JAVAD_D TOPCON G 2012/11/26 4:30:00 7:30: H2 JAVAD_D TOPCON GJ 2012/11/26 4:30:00 7:30: H3 Trimble JAVAD_D G 2012/12/4 0:15:00 3:15: H3 Trimble JAVAD_D GJ 2012/12/4 0:15:00 3:15: H4 JAVAD_D JAVAD_D G 2012/12/4 4:30:00 7:30: H4 JAVAD_D JAVAD_D GJ 2012/12/4 4:30:00 7:30: H1 TOPCON JAVAD_D G 2012/12/6 0:15:00 3:15: H1 TOPCON JAVAD_D GJ 2012/12/6 0:15:00 3:15: H2 JAVAD_D TOPCON G 2012/12/6 4:30:00 7:30: H2 JAVAD_D TOPCON GJ 2012/12/6 4:30:00 7:30: 安定した解が得られるようにするためには 多くのサンプルを解析し 統計的に Fix 解 が多く得られる 解析プログラムのオプションの設定が必要である -48-
22 短距離基線短距離基線場の解析は 高岡 No.10 から高岡 No.1 および高岡 No.2 の 2 基線に加えて 高岡 No.1 から高岡 No.2 の短基線についても解析を実施した 解析は 観測時間 3 時間の中から 最初の 1 時間と最後の 1 時間の 2 セッションを解析した 短距離基線で Fix する確率は 非常に高く 全ての基線で Fix 解が得られた ただし 成果を比較すると全ての基線が許容範囲に入っているわけではない 許容範囲を超える基線は Ratio がかなり低くなっている Ratio は観測時間中に途中で消える衛星や途中でデータ受信可能になった衛星が存在すると数値が下がる傾向である 本業務では Ratio が悪くなっていく途中で観測時間が終了となっている場合 最後の Fix 解をその観測時間の採用値とするため その採用値を比較基線場の成果と比較すると許容範囲に収まらないためである 解析プログラムで 衛星のマスク処理について検討する必要があると考えられる 短距離基線の解析結果を表 32から表 40に示す -49-


23 表 32 比較基線場 _ 短基線解析結果 _ 国松 No.1 高岡 No.2_Mask15-50-


24 表 33 比較基線場 _ 短基線解析結果 _ 国松 No.10 高岡 No.1_Mask15-51-


25 表 34 比較基線場 _ 短基線解析結果 _ 国松 No.10 高岡 No.2_Mask15-52-

26 表 35 比較基線場 _ 短基線解析結果 _ 国松 No.1 高岡 No.2_Mask30-53-

27 表 36 比較基線場 _ 短基線解析結果 _ 国松 No.10 高岡 No.1_Mask30-54-


28 表 37 比較基線場 _ 短基線解析結果 _ 国松 No.10 高岡 No.2_Mask30-55-


29 表 38 比較基線場 _ 短基線解析結果 _ 国松 No.1 高岡 No.2_Mask45-56-


30 表 39 比較基線場 _ 短基線解析結果 _ 国松 No.10 高岡 No.1_Mask45-57-

31 表 40 比較基線場 _ 短基線解析結果 _ 国松 No.10 高岡 No.2_Mask45-58-
32 5.2. スタティック 2 周波スタティック 2 周波の解析は 電子基準点から 1 級基準点相当の 3 点を結ぶ基線が 10km 以上の長基線 国土地理院周辺に位置する 1 級基準点相当の 3 点を結ぶ 3 基線が短基線となり 合計 6 基線で構成される 観測は 1 日で 2 セッション実施しており それぞれの基線解析を実施した またスタティック法の観測時間短縮や短縮スタティックの可能性なども検討するため 観測時間の中で時間を区切って解析を実施した 解析に使用したデータは 表 41のとおりである 観測セッシ区分ョン名 スタ 2 テ周ィ波ック 2S1 2S2 表 41 スタティック 2 周波観測記録一覧表 点番号 点名 観測日 時刻 (UTC) 観測アンテナ高ファイル名通算日受信機名受信機番号開始終了時間 (m) RINEX Ver 院内 No /11/ :33:00 2:30:30 2:57:30 JAVAD D S1_1011_ 公共 No /11/ :59:30 2:31:30 2:32:00 JAVAD D S1_1001_ 公共 No /11/ :10:30 2:30:15 2:19:45 JAVAD D S1_1002_ 院内 No /11/ :40:21 5:15:01 2:34:40 TOPCON S2_1011_ 公共 No /11/ :42:15 5:00:45 2:18:30 JAVAD D S2_1001_ 公共 No /11/ :40:30 5:00:15 2:19:45 Trimble 5135K S2_1002_333 図 65 スタテッィク 2 周波平均図 -59-
33 2 周波スタティックは 基線解析をするだけではなく 新点位置の評価を含む 新点位置の算出には公共基準点測量の 1 級基準点測量を模して実施した 与点となる電子基準点成果は 国土地理院ホームページより成果値を検索し 使用した また 与点の成果にセミ ダイナミック補正を行い 今期成果としてこれを使用して基線解析を実施した セミ ダイナミック補正のプログラムは Web 版 SemiDynaEXE Ver を使用し パラメータは SemiDyna2012.par を指定して変換を行った 表 42 解析に使用した電子基準点の成果と セミ ダイナミック補正 後の成果 元期 今期 ID Name 石下 阿見 守谷 石下 阿見 守谷 B L 標高 ジオイド高 楕円体高 X Y Z 使用した電子基準点の受信機は 石下と阿見がTOPCON 社製で 守谷がTrimble 社製で あり 本業務で借用したGNSSと同型の受信機で観測されている したがって 電子基準点 との長基線において同機種や異機種の観測が可能である 図 65における 10km 未満のの基 線は スタティック 1 周波の解析であるため 1 時間以上の解析やL2Pを使用した解析は実 施していない 下記基線ベクトルの解析種類を表 43に示す 表 43 2 周波スタティック解析における解析種類 基線ベクトル 衛星 スタティック短縮スタティック解析時間解析時間 石下 院内 No.11 G, GJ, GJR, 2h,1h45m,1h30m, G, G J, G JR 1h15m,1h 1h,40m,20m 阿見 公共 No.4 G, GJ, GJR, 2h,1h45m,1h30m, G, G J, G JR 1h15m,1h 1h,40m,20m 守谷 公共 No.9 G, GJ, GJR, 2h,1h45m,1h30m, G, G J, G JR 1h15m,1h 1h,40m,20m 院内 No.11 公共 No.4 G,GJ,GJR 1h 1h,40m,20m 公共 No.4 公共 No.9 G,GJ,GJR 1h 1h,40m,20m 公共 No.9 院内 No.11 G,GJ,GJR 1h 1h,40m,20m 次ページより基線解析結果を表 44~ 表 53 に示す -60-
34 表 44 2S1 セッション解析結果 ( スタティック 30S サンプリング 1/3) -61-
35 表 45 2S1 セッション解析結果 ( スタティック 30S サンプリング 2/3) -62-
36 表 46 2S1 セッション解析結果 ( スタティック 30S サンプリング 3/3) -63-
37 表 47 2S2 セッション解析結果 ( スタティック 30S サンプリング 1/3) -64-
38 表 48 2S2 セッション解析結果 ( スタティック 30S サンプリング 2/3) -65-
39 表 49 2S2 セッション解析結果 ( スタティック 30S サンプリング 3/3) -66-
40 表 50 2S1 セッション解析結果 ( 短縮スタティック 15S サンプリング 1/2) -67-
41 表 51 2S1 セッション解析結果 ( 短縮スタティック 15S サンプリング 2/2) -68-
42 表 52 2S2 セッション解析結果 ( 短縮スタティック 15S サンプリング 1/2) -69-
43 表 53 2S2 セッション解析結果 ( 短縮スタティック 15S サンプリング 2/2) -70-
44 基線解析によって図 65の 6 種類の基線ベクトル全てでFix 解が得られた場合 平均図のとおり電子基準点を固定した 3 次元網平均計算を実施した GPS 衛星のみを用いてGPSの L2Cを除したG 解析結果のスタティック法 _ 長距離 2 時間解析を比較対象として 各条件で網平均計算を実施できた測点について表 54と表 55に示す 表 54 実用網平均計算結果 (2 周波スタティック :Session_2S1) ID NAME sat samp Latitude Longitude ellipsoid h X Y H geoid dx dy dh ddmmss.ssss dddmmss.ssss m m m m m m m m 2S1_ スタティック法 _ 長距離 2 時間解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S1_ スタティック法 _ 長距離 1 時間 45 分解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S1_ スタティック法 _ 長距離 1 時間 30 分解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S1_ スタティック法 _ 長距離 1 時間 15 分解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S1_ スタティック法 _ 長距離 1 時間解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S1_ 短縮スタティック法 _ 長距離 1 時間解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S1_ 短縮スタティック法 _ 長距離 40 分解析 _ 短距離 40 分解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S1_ 短縮スタティック法 _ 長距離 20 分解析 _ 短距離 20 分解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G'
45 表 55 実用網平均計算結果 (2 周波スタティック :Session_2S2) ID NAME sat samp Latitude Longitude ellipsoid h X Y H geoid dx dy dh ddmmss.ssss dddmmss.ssss m m m m m m m m 2S2_ スタティック法 _ 長距離 2 時間解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S2_ スタティック法 _ 長距離 1 時間 45 分解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S2_ スタティック法 _ 長距離 1 時間 30 分解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S2_ スタティック法 _ 長距離 1 時間 15 分解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S2_ スタティック法 _ 長距離 1 時間解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S2_ 短縮スタティック法 _ 長距離 1 時間解析 _ 短距離 1 時間解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' S2_ 短縮スタティック法 _ 長距離 40 分解析 _ 短距離 40 分解析 583 石下 G' 阿見 G' 守谷 G' 院内 No11 G' 公共 No4 G' 公共 No9 G' 次元網平均計算は 全基線で Fix 解が得られた G での解析結果を用いて実施した 比 較する座標系は平面直角座標系第 9 系の XY および H を使用して比較した 最大値は平面位置で最大 5mm 程度の較差であり 高低差では 19mm であった 較差が 最大値である基線は 短縮スタティックの検証において 15 秒サンプリングで 20 分の解析 を実施した基線である セッション 2S2 では阿見から公共 No.4 の基線解析で Fix 解が得ら れなかった データが少ないため 統計的な評価は難しいが 20 分の短縮スタティックの 観測では難しいと考えられる また 準天頂衛星および GLONASS データを用いた基線は 電子基準点との長基線ベクトルで Fix 解を得ることができず 3 次元網平均計算は実施不可 能であった -72-
46 5.3. スタティック 1 周波スタティック 1 周波の観測は 1 日で実施し 院内 No.11 1 級 No.1 1 級 No.1 1 級 No.2 の 2 つの基線ベクトルは重複辺として 2 セッションの測量網で 2 セット観測を実施した 各観測は 10km 以下の短距離である したがって 1 周波のみの解析である 基線解析に用いたデータは 表 56に示す 基線解析した各セッションの基線ベクトルは 重複辺の点検計算を実施し 基線ベクトル成分を利用して 3 次元網平均計算を実施した これらの網平均計算は 固定重量とした また 与点は スタティック 2 周波で求めた新点 3 点 ( 院内 No.11 公共 No.4 公共 No.9) とした 表 57に与点として使用した成果を示す 与点は 2S1 セッションで得られた長距離 2 時間 短距離 1 時間解析の実用網平均計算結果を使用した 観測区分 スタティック 1 周波 セッション名 1S1 1S2 1S3 1S4 表 56 スタティック 1 周波観測記録一覧表 点番号 点名 観測日 時刻 (UTC) 観測アンテナ高ファイル名通算日受信機名受信機番号開始終了時間 (m) RINEX Ver 院内 No /12/ :01:00 1:30:30 1:29:30 JAVAD D S1_1011_ 公共 No /12/ :00:30 1:30:15 1:29:45 JAVAD D S1_1002_ 級 No /12/ :00:30 1:30:15 1:29:45 JAVAD D S1_0101_ 級 No /12/ :00:30 1:30:30 1:30:00 JAVAD S S1_0102_ 院内 No /12/ :20:00 6:50:30 1:30:30 JAVAD D S2_1011_ 公共 No /12/ :20:30 6:50:30 1:30:00 JAVAD D S2_1001_ 級 No /12/ :20:30 6:50:15 1:29:45 JAVAD D S2_0101_ 級 No /12/ :20:30 6:50:45 1:30:15 JAVAD S S2_0102_ 院内 No /12/ :41:15 3:10:00 1:28:45 JAVAD D S3_1011_ 公共 No /12/ :40:30 3:10:15 1:29:45 JAVAD D S3_1002_ 級 No /12/ :40:30 3:11:30 1:31:00 Trimble 5135K S3_0101_ 級 No /12/ :39:22 3:10:32 1:31:10 TOPCON S3_0102_ 院内 No /12/ :41:00 5:11:15 1:30:15 JAVAD D S4_1011_ 公共 No /12/ :40:30 5:10:30 1:30:00 JAVAD D S4_1001_ 級 No /12/ :40:30 5:10:15 1:29:45 Trimble 5135K S4_0101_ 級 No /12/ :40:49 5:10:39 1:29:50 TOPCON S4_0102_338 表 57 スタティック 1 周波与点成果一覧表 ID NAME 緯度 経度 楕円体高 X Y Z 1011 院内 No 公共 No 公共 No 周波スタティックの解析は 全ての基線でFix 解が得られた しかし 重複辺の点検を実施すると 許容範囲を超える基線が多数散見された 重複辺の許容範囲は 作業規定の準則における重複基線ベクトルの較差の許容範囲を採用した 重複基線ベクトルの較差の許容範囲は 表 58のとおりである -73-
47 表 58 点検計算の許容範囲 区分許容範囲備考 基線ベクトルの環閉合差重複する基線ベクトルの較差 水平 ( N E) 高さ ( U) 20mm 30mm N N N: 辺数 ΔN: 水平面の南北方向の閉合差又は較差 水平 ( N E) 高さ ( U) 20mm 30mm ΔE: 水平面の東西方向の閉合差又は較差 ΔU: 高さ方向の閉合差又は較差 重複辺の較差が許容範囲を超える基線は Ratio が低い基線で起きていることが判明した 1 時間の解析の中で 30 分を過ぎたあたりから Fix 解が得られる確率が下がり始めて 解析終了時には Ratio が1 桁台にまで落ちている そのような場合 たとえ解が Fix していても その解は成果と比較して 数十 cm 程度ずれてしまう場合がある Ratio が低い基線ベクトルについては 衛星状況を Skyplot で1 基線ずつ確認し 衛星の位相差の組み合わせに影響を与える途中で観測できなくなる衛星 あるいは途中から現れる衛星を省いて再度基線解析を行い 結果を比較する作業が必要となった 図 66 スタティック 1 周波平均図 -74-
48 解析した基線ベクトルは 1 つの基線ベクトルにつきスタティック (30 秒サンプリング ) で 3 種類の解析時間 短縮スタティック (15 秒サンプリング ) で 3 種類の解析時間をそれぞれ 使用する衛星をGPS GPSに準天頂衛星加えたもの GPSと準天頂衛星にGLONASS を加えたものの 3 種類の解析を実施した スタティック 1 周波の解析は全部で 4 セッション実施しているが 1S1 と 1S2 の組み合わせで同機種の受信機による観測値の平均計算 1S3 と 1S4 の組み合わせで異機種の受信機による観測値の平均計算が実施できるようにしている 1 つの組み合わせによる基線解析の種類を表 59に示す 表 59 1 周波スタティック解析における解析種類 基線ベクトル 衛星 スタティック短縮スタティック解析時間解析時間 1 級 No.1 1 級 No.2 G, GJ, GJR, 1h,45m,30m 40m,30m, 20m 1 級 No.2 公共 No.9 G, GJ, GJR, 1h,45m,30m 40m,30m,20m 公共 No.9 院内 No.11 G, GJ, GJR, 1h,45m,30m 40m,30m,20m 院内 No.11 1 級 No.1 G, GJ, GJR, 1h,45m,30m 40m,30m,20m 1 級 No.1 1 級 No.2 G, GJ, GJR, 1h,45m,30m 40m,30m,20m 1 級 No.2 公共 No.4 G, GJ, GJR, 1h,45m,30m 40m,30m,20m 公共 No.4 院内 No.11 G, GJ, GJR, 1h,45m,30m 40m,30m,20m 院内 No.11 1 級 No.1 G, GJ, GJR, 1h,45m,30m 40m,30m,20m 基線解析した結果を表 61~ 表 64に示す Ratioが低い基線ベクトルについては 特定の衛星を外す等の処理を行い Ratioが落ちることを防ぐように調整を行った 衛星の除外処理をして基線解析を行った基線は 表 60のとおりである 表 60 除外した測位衛星一覧表観測日開始時間自至 REC REC 除外した衛星番号 2012/12/3 00:15:00 院内 No.11 1 級 No.1 JAVAD_D JAVAD_D 除外 :3, 7, 8, 17, /12/3 00:15:00 1 級 No.1 1 級 No.2 JAVAD_D JAVAD_S 除外 :3, 7, 8, 17, /12/3 00:15:00 1 級 No.2 公共 No.9 JAVAD_S JAVAD_D 除外 :3, 7, 8, 17, /12/3 04:00:00 1 級 No.1 1 級 No.2 Trimble TOPCON 除外 :2, 5, /12/3 04:00:00 1 級 No.2 公共 No.4 TOPCON JAVAD_D 除外 :2, 5,
49 表 61 1S1 セッション解析結果 base line base REC rover REC obs Start obs End obs Time sat samp BaseSat1 BaseSat2 Fix_Last_dX Fix_Last_dY Fix_Last_dZ Ratio Fix 数 Float 数 0:15:00 1:15:00 1h 00m G 30 G :15:00 1:00:00 0h 45m G 30 G :15:00 0:45:00 0h 30m G 30 G 級 No.1 0:15:00 1:15:00 1h 00m GJ 30 J 級 JAVAD_D JAVAD_S 0:15:00 1:00:00 0h 45m GJ 30 J No.2 0:15:00 0:45:00 0h 30m GJ 30 J :15:00 1:15:00 1h 00m GJR 30 J1 R :15:00 1:00:00 0h 45m GJR 30 J1 R :15:00 0:45:00 0h 30m GJR 30 J1 R :15:00 1:15:00 1h 00m G 30 G :15:00 1:00:00 0h 45m G 30 G :15:00 0:45:00 0h 30m G 30 G 級 No.2 0:15:00 1:15:00 1h 00m GJ 30 J 公共 JAVAD_S JAVAD_D 0:15:00 1:00:00 0h 45m GJ 30 J No.9 0:15:00 0:45:00 0h 30m GJ 30 J :15:00 1:15:00 1h 00m GJR 30 J1 R :15:00 1:00:00 0h 45m GJR 30 J1 R :15:00 0:45:00 0h 30m GJR 30 J1 R :15:00 1:15:00 1h 00m G 30 G :15:00 1:00:00 0h 45m G 30 G :15:00 0:45:00 0h 30m G 30 G 公共 No.9 0:15:00 1:15:00 1h 00m GJ 30 J 院内 JAVAD_D JAVAD_D 0:15:00 1:00:00 0h 45m GJ 30 J No.11 0:15:00 0:45:00 0h 30m GJ 30 J :15:00 1:15:00 1h 00m GJR 30 J1 R :15:00 1:00:00 0h 45m GJR 30 J1 R :15:00 0:45:00 0h 30m GJR 30 J1 R :15:00 1:15:00 1h 00m G 30 G :15:00 1:00:00 0h 45m G 30 G :15:00 0:45:00 0h 30m G 30 G 院内 No.11 0:15:00 1:15:00 1h 00m GJ 30 J 級 JAVAD_D JAVAD_D 0:15:00 1:00:00 0h 45m GJ 30 J No.1 0:15:00 0:45:00 0h 30m GJ 30 J :15:00 1:15:00 1h 00m GJR 30 J1 R :15:00 1:00:00 0h 45m GJR 30 J1 R :15:00 0:45:00 0h 30m GJR 30 J1 R :15:00 0:55:00 0h 40m G 15 G :15:00 0:45:00 0h 30m G 15 G :15:00 0:35:00 0h 20m G 15 G 級 No.1 0:15:00 0:55:00 0h 40m GJ 15 J 級 JAVAD_D JAVAD_S 0:15:00 0:45:00 0h 30m GJ 15 J No.2 0:15:00 0:35:00 0h 20m GJ 15 J :15:00 0:55:00 0h 40m GJR 15 J1 R :15:00 0:45:00 0h 30m GJR 15 J1 R :15:00 0:35:00 0h 20m GJR 15 J1 R :15:00 0:55:00 0h 40m G 15 G :15:00 0:45:00 0h 30m G 15 G :15:00 0:35:00 0h 20m G 15 G 級 No.2 0:15:00 0:55:00 0h 40m GJ 15 J 公共 JAVAD_S JAVAD_D 0:15:00 0:45:00 0h 30m GJ 15 J No.9 0:15:00 0:35:00 0h 20m GJ 15 J :15:00 0:55:00 0h 40m GJR 15 J1 R :15:00 0:45:00 0h 30m GJR 15 J1 R :15:00 0:35:00 0h 20m GJR 15 J1 R :15:00 0:55:00 0h 40m G 15 G :15:00 0:45:00 0h 30m G 15 G :15:00 0:35:00 0h 20m G 15 G 公共 No.9 0:15:00 0:55:00 0h 40m GJ 15 J 院内 JAVAD_D JAVAD_D 0:15:00 0:45:00 0h 30m GJ 15 J No.11 0:15:00 0:35:00 0h 20m GJ 15 J :15:00 0:55:00 0h 40m GJR 15 J1 R :15:00 0:45:00 0h 30m GJR 15 J1 R :15:00 0:35:00 0h 20m GJR 15 J1 R :15:00 0:55:00 0h 40m G 15 G :15:00 0:45:00 0h 30m G 15 G :15:00 0:35:00 0h 20m G 15 G 院内 No.11 0:15:00 0:55:00 0h 40m GJ 15 J 級 JAVAD_D JAVAD_D 0:15:00 0:45:00 0h 30m GJ 15 J No.1 0:15:00 0:35:00 0h 20m GJ 15 J :15:00 0:55:00 0h 40m GJR 15 J1 R :15:00 0:45:00 0h 30m GJR 15 J1 R :15:00 0:35:00 0h 20m GJR 15 J1 R
50 表 62 1S2 セッション解析結果 base line base REC rover REC obs Start obs End obs Time sat samp BaseSat1 BaseSat2 Fix_Last_dX Fix_Last_dY Fix_Last_dZ Ratio Fix 数 Float 数 5:30:00 6:30:00 1h 00m G 30 G :30:00 6:15:00 0h 45m G 30 G 級 No.1 1 級 No.2 1 級 No.2 公共 No.4 公共 No.4 院内 No.11 院内 No.11 1 級 No.1 1 級 No.1 1 級 No.2 1 級 No.2 公共 No.4 公共 No.4 院内 No.11 JAVAD_D JAVAD_S JAVAD_S JAVAD_D JAVAD_D JAVAD_D JAVAD_D JAVAD_D JAVAD_D JAVAD_S JAVAD_S JAVAD_D JAVAD_D JAVAD_D 院内 No.11 1 級 JAVAD_D JAVAD_D No.1 5:30:00 6:00:00 0h 30m G 30 G :30:00 6:30:00 1h 00m GJ 30 J :30:00 6:15:00 0h 45m GJ 30 J :30:00 6:00:00 0h 30m GJ 30 J :30:00 6:30:00 1h 00m GJR 30 J1 R :30:00 6:15:00 0h 45m GJR 30 J1 R :30:00 6:00:00 0h 30m GJR 30 J1 R :30:00 6:30:00 1h 00m G 30 G :30:00 6:15:00 0h 45m G 30 G :30:00 6:00:00 0h 30m G 30 G :30:00 6:30:00 1h 00m GJ 30 J :30:00 6:15:00 0h 45m GJ 30 J :30:00 6:00:00 0h 30m GJ 30 J :30:00 6:30:00 1h 00m GJR 30 J1 R :30:00 6:15:00 0h 45m GJR 30 J1 R :30:00 6:00:00 0h 30m GJR 30 J1 R :30:00 6:30:00 1h 00m G 30 G :30:00 6:15:00 0h 45m G 30 G :30:00 6:00:00 0h 30m G 30 G :30:00 6:30:00 1h 00m GJ 30 J :30:00 6:15:00 0h 45m GJ 30 J :30:00 6:00:00 0h 30m GJ 30 J :30:00 6:30:00 1h 00m GJR 30 J1 R :30:00 6:15:00 0h 45m GJR 30 J1 R :30:00 6:00:00 0h 30m GJR 30 J1 R :30:00 6:30:00 1h 00m G 30 G :30:00 6:15:00 0h 45m G 30 G :30:00 6:00:00 0h 30m G 30 G :30:00 6:30:00 1h 00m GJ 30 J :30:00 6:15:00 0h 45m GJ 30 J :30:00 6:00:00 0h 30m GJ 30 J :30:00 6:30:00 1h 00m GJR 30 J1 R :30:00 6:15:00 0h 45m GJR 30 J1 R :30:00 6:00:00 0h 30m GJR 30 J1 R :30:00 6:10:00 0h 40m G 15 G :30:00 6:00:00 0h 30m G 15 G :30:00 5:50:00 0h 20m G 15 G :30:00 6:10:00 0h 40m GJ 15 J :30:00 6:00:00 0h 30m GJ 15 J :30:00 5:50:00 0h 20m GJ 15 J :30:00 6:10:00 0h 40m GJR 15 J1 R :30:00 6:00:00 0h 30m GJR 15 J1 R :30:00 5:50:00 0h 20m GJR 15 J1 R :30:00 6:10:00 0h 40m G 15 G :30:00 6:00:00 0h 30m G 15 G :30:00 5:50:00 0h 20m G 15 G :30:00 6:10:00 0h 40m GJ 15 J :30:00 6:00:00 0h 30m GJ 15 J :30:00 5:50:00 0h 20m GJ 15 J :30:00 6:10:00 0h 40m GJR 15 J1 R :30:00 6:00:00 0h 30m GJR 15 J1 R :30:00 5:50:00 0h 20m GJR 15 J1 R :30:00 6:10:00 0h 40m G 15 G :30:00 6:00:00 0h 30m G 15 G :30:00 5:50:00 0h 20m G 15 G :30:00 6:10:00 0h 40m GJ 15 J :30:00 6:00:00 0h 30m GJ 15 J :30:00 5:50:00 0h 20m GJ 15 J :30:00 6:10:00 0h 40m GJR 15 J1 R :30:00 6:00:00 0h 30m GJR 15 J1 R :30:00 5:50:00 0h 20m GJR 15 J1 R :30:00 6:10:00 0h 40m G 15 G :30:00 6:00:00 0h 30m G 15 G :30:00 5:50:00 0h 20m G 15 G :30:00 6:10:00 0h 40m GJ 15 J :30:00 6:00:00 0h 30m GJ 15 J :30:00 5:50:00 0h 20m GJ 15 J :30:00 6:10:00 0h 40m GJR 15 J1 R :30:00 6:00:00 0h 30m GJR 15 J1 R :30:00 5:50:00 0h 20m GJR 15 J1 R
51 表 63 1S3 セッション解析結果 base line base REC rover REC obs Start obs End obs Time sat samp BaseSat1 BaseSat2 Fix_Last_dX Fix_Last_dY Fix_Last_dZ Ratio Fix 数 Float 数 1:45:00 2:45:00 1h 00m G 30 G :45:00 2:30:00 0h 45m G 30 G 級 No.1 1 級 No.2 1 級 No.2 公共 No.9 公共 No.9 院内 No.11 院内 No.11 1 級 No.1 1 級 No.1 1 級 No.2 1 級 No.2 公共 No.9 公共 No.9 院内 No.11 Trimble TOPCON TOPCON JAVAD_D JAVAD_D JAVAD_D JAVAD_D Trimble Trimble TOPCON TOPCON JAVAD_D JAVAD_D JAVAD_D 院内 No.11 1 級 JAVAD_D Trimble No.1 1:45:00 2:15:00 0h 30m G 30 G :45:00 2:45:00 1h 00m GJ 30 J :45:00 2:30:00 0h 45m GJ 30 J :45:00 2:15:00 0h 30m GJ 30 J :45:00 2:45:00 1h 00m GJR 30 J1 R :45:00 2:30:00 0h 45m GJR 30 J1 R :45:00 2:15:00 0h 30m GJR 30 J1 R :45:00 2:45:00 1h 00m G 30 G :45:00 2:30:00 0h 45m G 30 G :45:00 2:15:00 0h 30m G 30 G :45:00 2:45:00 1h 00m GJ 30 J :45:00 2:30:00 0h 45m GJ 30 J :45:00 2:15:00 0h 30m GJ 30 J :45:00 2:45:00 1h 00m GJR 30 J1 R :45:00 2:30:00 0h 45m GJR 30 J1 R :45:00 2:15:00 0h 30m GJR 30 J1 R :45:00 2:45:00 1h 00m G 30 G :45:00 2:30:00 0h 45m G 30 G :45:00 2:15:00 0h 30m G 30 G :45:00 2:45:00 1h 00m GJ 30 J :45:00 2:30:00 0h 45m GJ 30 J :45:00 2:15:00 0h 30m GJ 30 J :45:00 2:45:00 1h 00m GJR 30 J1 R :45:00 2:30:00 0h 45m GJR 30 J1 R :45:00 2:15:00 0h 30m GJR 30 J1 R :45:00 2:45:00 1h 00m G 30 G :45:00 2:30:00 0h 45m G 30 G :45:00 2:15:00 0h 30m G 30 G :45:00 2:45:00 1h 00m GJ 30 J :45:00 2:30:00 0h 45m GJ 30 J :45:00 2:15:00 0h 30m GJ 30 J :45:00 2:45:00 1h 00m GJR 30 J1 R :45:00 2:30:00 0h 45m GJR 30 J1 R :45:00 2:15:00 0h 30m GJR 30 J1 R :45:00 2:25:00 0h 40m G 15 G :45:00 2:15:00 0h 30m G 15 G :45:00 2:05:00 0h 20m G 15 G :45:00 2:25:00 0h 40m GJ 15 J :45:00 2:15:00 0h 30m GJ 15 J :45:00 2:05:00 0h 20m GJ 15 J :45:00 2:25:00 0h 40m GJR 15 J1 R :45:00 2:15:00 0h 30m GJR 15 J1 R :45:00 2:05:00 0h 20m GJR 15 J1 R :45:00 2:25:00 0h 40m G 15 G :45:00 2:15:00 0h 30m G 15 G :45:00 2:05:00 0h 20m G 15 G :45:00 2:25:00 0h 40m GJ 15 J :45:00 2:15:00 0h 30m GJ 15 J :45:00 2:05:00 0h 20m GJ 15 J :45:00 2:25:00 0h 40m GJR 15 J1 R :45:00 2:15:00 0h 30m GJR 15 J1 R :45:00 2:05:00 0h 20m GJR 15 J1 R :45:00 2:25:00 0h 40m G 15 G :45:00 2:15:00 0h 30m G 15 G :45:00 2:05:00 0h 20m G 15 G :45:00 2:25:00 0h 40m GJ 15 J :45:00 2:15:00 0h 30m GJ 15 J :45:00 2:05:00 0h 20m GJ 15 J :45:00 2:25:00 0h 40m GJR 15 J1 R :45:00 2:15:00 0h 30m GJR 15 J1 R :45:00 2:05:00 0h 20m GJR 15 J1 R :45:00 2:25:00 0h 40m G 15 G :45:00 2:15:00 0h 30m G 15 G :45:00 2:05:00 0h 20m G 15 G :45:00 2:25:00 0h 40m GJ 15 J :45:00 2:15:00 0h 30m GJ 15 J :45:00 2:05:00 0h 20m GJ 15 J :45:00 2:25:00 0h 40m GJR 15 J1 R :45:00 2:15: 00 0h 30m GJR 15 J1 R :45:00 2:05: 00 0h 20m GJR 15 J1 R
52 表 64 1S4 セッション解析結果 base line base REC rover REC obs Start obs End obs Time sat samp BaseSat1 BaseSat2 Fix_Last_dX Fix_Last_dY Fix_Last_dZ Ratio Fix 数 Float 数 4:00:00 5:00:00 1h 00m G 30 G :00:00 4:45:00 0h 45m G 30 G 級 No.1 1 級 No.2 1 級 No.2 公共 No.4 公共 No.4 院内 No.11 院内 No.11 1 級 No.1 1 級 No.1 1 級 No.2 1 級 No.2 公共 No.4 公共 No.4 院内 No.11 Trimble TOPCON TOPCON JAVAD_D 院内 No.11 1 級 JAVAD_D No.1 TOPCON TOPCON JAVAD_D JAVAD_D JAVAD_D JAVAD_D Trimble Trimble JAVAD_D JAVAD_D Trimble 4:00:00 4:30:00 0h 30m G 30 G :00:00 5:00:00 1h 00m GJ 30 J :00:00 4:45:00 0h 45m GJ 30 J :00:00 4:30:00 0h 30m GJ 30 J :00:00 5:00:00 1h 00m GJR 30 J1 R :00:00 4:45:00 0h 45m GJR 30 J1 R :00:00 4:30:00 0h 30m GJR 30 J1 R :00:00 5:00:00 1h 00m G 30 G :00:00 4:45:00 0h 45m G 30 G :00:00 4:30:00 0h 30m G 30 G :00:00 5:00:00 1h 00m GJ 30 J :00:00 4:45:00 0h 45m GJ 30 J :00:00 4:30:00 0h 30m GJ 30 J :00:00 5:00:00 1h 00m GJR 30 J1 R :00:00 4:45:00 0h 45m GJR 30 J1 R :00:00 4:30:00 0h 30m GJR 30 J1 R :00:00 5:00:00 1h 00m G 30 G :00:00 4:45:00 0h 45m G 30 G :00:00 4:30:00 0h 30m G 30 G :00:00 5:00:00 1h 00m GJ 30 J :00:00 4:45:00 0h 45m GJ 30 J :00:00 4:30:00 0h 30m GJ 30 J :00:00 5:00:00 1h 00m GJR 30 J1 R :00:00 4:45:00 0h 45m GJR 30 J1 R :00:00 4:30:00 0h 30m GJR 30 J1 R :00:00 5:00:00 1h 00m G 30 G :00:00 4:45:00 0h 45m G 30 G :00:00 4:30:00 0h 30m G 30 G :00:00 5:00:00 1h 00m GJ 30 J :00:00 4:45:00 0h 45m GJ 30 J :00:00 4:30:00 0h 30m GJ 30 J :00:00 5:00:00 1h 00m GJR 30 J1 R :00:00 4:45:00 0h 45m GJR 30 J1 R :00:00 4:30:00 0h 30m GJR 30 J1 R :00:00 4:40:00 0h 40m G 15 G :00:00 4:30:00 0h 30m G 15 G :00:00 4:20:00 0h 20m G 15 G :00:00 4:40:00 0h 40m GJ 15 J :00:00 4:30:00 0h 30m GJ 15 J :00:00 4:20:00 0h 20m GJ 15 J :00:00 4:40:00 0h 40m GJR 15 J1 R :00:00 4:30:00 0h 30m GJR 15 J1 R :00:00 4:20:00 0h 20m GJR 15 J1 R :00:00 4:40:00 0h 40m G 15 G :00:00 4:30:00 0h 30m G 15 G :00:00 4:20:00 0h 20m G 15 G :00:00 4:40:00 0h 40m GJ 15 J :00:00 4:30:00 0h 30m GJ 15 J :00:00 4:20:00 0h 20m GJ 15 J :00:00 4:40:00 0h 40m GJR 15 J1 R :00:00 4:30:00 0h 30m GJR 15 J1 R :00:00 4:20:00 0h 20m GJR 15 J1 R :00:00 4:40:00 0h 40m G 15 G :00:00 4:30:00 0h 30m G 15 G :00:00 4:20:00 0h 20m G 15 G :00:00 4:40:00 0h 40m GJ 15 J :00:00 4:30:00 0h 30m GJ 15 J :00:00 4:20:00 0h 20m GJ 15 J :00:00 4:40:00 0h 40m GJR 15 J1 R :00:00 4:30:00 0h 30m GJR 15 J1 R :00:00 4:20:00 0h 20m GJR 15 J1 R :00:00 4:40:00 0h 40m G 15 G :00:00 4:30:00 0h 30m G 15 G :00:00 4:20:00 0h 20m G 15 G :00:00 4:40:00 0h 40m GJ 15 J :00:00 4:30:00 0h 30m GJ 15 J :00:00 4:20:00 0h 20m GJ 15 J :00:00 4:40:00 0h 40m GJR 15 J1 R :00:00 4:30:00 0h 30m GJR 15 J1 R :00:00 4:20:00 0h 20m GJR 15 J1 R



53 表 65 1S1 と 1S2 における重複辺の点検 -80-


54 表 66 1S2 と 1S4 における重複辺の点検 -81-



55 表 67 1S3 と 1S4 における重複辺の点検 -82-



56 表 68 1S1 と 1S3 における重複辺の点検 -83-
57 基線解析したベクトルは 全ての組み合わせで重複基線ベクトルの点検を実施し 重複 する基線ベクトルの較差が許容範囲内であることを確認した ( 表 65~ 表 68 参照 ) 本業務での観測は 各セッションにおける基線ベクトルは環閉合を点検できる網になっており これらを点検した 点検結果は 表 69のとおりである 重複する基線ベクトル基線ベクトルの較差が許容範囲内にあるデータについては 基線ベクトルの環閉合差も許容範囲内であった 点検計算の許容範囲は 表 58のとおりである 表 69 各セッションにおける環閉合の点検 区分 スタティック 短縮スタティック sess sat elv samp obs Time sess1 環閉合 sess2 環閉合 N E U N E U 1S1, 1S2 G h S1, 1S2 G m S1, 1S2 G m S3, 1S4 G h S3, 1S4 G m S3, 1S4 G m S1, 1S2 GJ h S1, 1S2 GJ m S1, 1S2 GJ m S3, 1S4 GJ h S3, 1S4 GJ m S3, 1S4 GJ m S1, 1S2 GJR h S1, 1S2 GJR m S1, 1S2 GJR m S3, 1S4 GJR h S3, 1S4 GJR m S3, 1S4 GJR m S1, 1S2 G m S1, 1S2 G m S1, 1S2 G m S3, 1S4 G m S3, 1S4 G m S3, 1S4 G m S1, 1S2 GJ m S1, 1S2 GJ m S1, 1S2 GJ m S3, 1S4 GJ m S3, 1S4 GJ m S3, 1S4 GJ m S1, 1S2 GJR m S1, 1S2 GJR m S1, 1S2 GJR m S3, 1S4 GJR m S3, 1S4 GJR m S3, 1S4 GJR m 次元網平均計算は 1S1 と 1S2 で得られた基線ベクトルを使用して 1 つの解を計算した さらに 1S3 と 1S4 で得られた基線ベクトルを使用して もう 1 つの解を計算した それぞれの重複基線ベクトルは 観測した時間が早い基線を採用辺として取扱い 3 次元網平均計算で使用して計算を実施した 院内 No.11 を 1 点固定した仮定網平均計算の結果から精度管理表を表 70~ 表 73のとおり作成した -84-
58 表 70 仮定網平均計算精度管理表 (1/4) sess sat elv samp Time 自 至 斜距離 観測値 偏差 ID NAME ID NAME S X Y Z X Y Z 1S1, 1S2 G h 級 No 級 No S1, 1S2 G h 級 No 公共 No S1, 1S2 G h 1009 公共 No 院内 No S1, 1S2 G h 1011 院内 No 級 No S1, 1S2 G h 級 No 公共 No S1, 1S2 G h 1004 公共 No 院内 No S1, 1S2 G m 級 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1009 公共 No 院内 No S1, 1S2 G m 1011 院内 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1004 公共 No 院内 No S1, 1S2 G m 級 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1009 公共 No 院内 No S1, 1S2 G m 1011 院内 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1004 公共 No 院内 No S3, 1S4 G h 級 No 級 No S3, 1S4 G h 級 No 公共 No S3, 1S4 G h 1009 公共 No 院内 No S3, 1S4 G h 1011 院内 No 級 No S3, 1S4 G h 級 No 公共 No S3, 1S4 G h 1004 公共 No 院内 No S3, 1S4 G m 級 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1009 公共 No 院内 No S3, 1S4 G m 1011 院内 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1004 公共 No 院内 No S3, 1S4 G m 級 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1009 公共 No 院内 No S3, 1S4 G m 1011 院内 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1004 公共 No 院内 No S1, 1S2 GJ h 級 No 級 No S1, 1S2 GJ h 級 No 公共 No S1, 1S2 GJ h 1009 公共 No 院内 No S1, 1S2 GJ h 1011 院内 No 級 No S1, 1S2 GJ h 級 No 公共 No S1, 1S2 GJ h 1004 公共 No 院内 No S1, 1S2 GJ m 級 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1009 公共 No 院内 No S1, 1S2 GJ m 1011 院内 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1004 公共 No 院内 No S1, 1S2 GJ m 級 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1009 公共 No 院内 No S1, 1S2 GJ m 1011 院内 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1004 公共 No 院内 No
59 表 71 仮定網平均計算精度管理表 (2/4) sess sat elv samp Time 自 至 斜距離 観測値 偏差 ID NAME ID NAME S X Y Z X Y Z 1S3, 1S4 GJ h 級 No 級 No S3, 1S4 GJ h 級 No 公共 No S3, 1S4 GJ h 1009 公共 No 院内 No S3, 1S4 GJ h 1011 院内 No 級 No S3, 1S4 GJ h 級 No 公共 No S3, 1S4 GJ h 1004 公共 No 院内 No S3, 1S4 GJ m 級 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1009 公共 No 院内 No S3, 1S4 GJ m 1011 院内 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1004 公共 No 院内 No S3, 1S4 GJ m 級 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1009 公共 No 院内 No S3, 1S4 GJ m 1011 院内 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1004 公共 No 院内 No S1, 1S2 GJR h 級 No 級 No S1, 1S2 GJR h 級 No 公共 No S1, 1S2 GJR h 1009 公共 No 院内 No S1, 1S2 GJR h 1011 院内 No 級 No S1, 1S2 GJR h 級 No 公共 No S1, 1S2 GJR h 1004 公共 No 院内 No S1, 1S2 GJR m 級 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1009 公共 No 院内 No S1, 1S2 GJR m 1011 院内 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1004 公共 No 院内 No S1, 1S2 GJR m 級 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1009 公共 No 院内 No S1, 1S2 GJR m 1011 院内 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1004 公共 No 院内 No S3, 1S4 GJR h 級 No 級 No S3, 1S4 GJR h 級 No 公共 No S3, 1S4 GJR h 1009 公共 No 院内 No S3, 1S4 GJR h 1011 院内 No 級 No S3, 1S4 GJR h 級 No 公共 No S3, 1S4 GJR h 1004 公共 No 院内 No S3, 1S4 GJR m 級 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1009 公共 No 院内 No S3, 1S4 GJR m 1011 院内 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1004 公共 No 院内 No S3, 1S4 GJR m 級 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1009 公共 No 院内 No S3, 1S4 GJR m 1011 院内 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1004 公共 No 院内 No
60 表 72 仮定網平均計算精度管理表 (3/4) sess sat elv samp Time 自 至 斜距離 観測値 偏差 ID NAME ID NAME S X Y Z X Y Z 1S1, 1S2 G m 級 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1009 公共 No 院内 No S1, 1S2 G m 1011 院内 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1004 公共 No 院内 No S1, 1S2 G m 級 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1009 公共 No 院内 No S1, 1S2 G m 1011 院内 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1004 公共 No 院内 No S1, 1S2 G m 級 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1009 公共 No 院内 No S1, 1S2 G m 1011 院内 No 級 No S1, 1S2 G m 級 No 公共 No S1, 1S2 G m 1004 公共 No 院内 No S3, 1S4 G m 級 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1009 公共 No 院内 No S3, 1S4 G m 1011 院内 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1004 公共 No 院内 No S3, 1S4 G m 級 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1009 公共 No 院内 No S3, 1S4 G m 1011 院内 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1004 公共 No 院内 No S3, 1S4 G m 級 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1009 公共 No 院内 No S3, 1S4 G m 1011 院内 No 級 No S3, 1S4 G m 級 No 公共 No S3, 1S4 G m 1004 公共 No 院内 No S1, 1S2 GJ m 級 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1009 公共 No 院内 No S1, 1S2 GJ m 1011 院内 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1004 公共 No 院内 No S1, 1S2 GJ m 級 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1009 公共 No 院内 No S1, 1S2 GJ m 1011 院内 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1004 公共 No 院内 No S1, 1S2 GJ m 級 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1009 公共 No 院内 No S1, 1S2 GJ m 1011 院内 No 級 No S1, 1S2 GJ m 級 No 公共 No S1, 1S2 GJ m 1004 公共 No 院内 No
61 表 73 仮定網平均計算精度管理表 (4/4) sess sat elv samp Time 自 至 斜距離 観測値 偏差 ID NAME ID NAME S X Y Z X Y Z 1S3, 1S4 GJ m 級 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1009 公共 No 院内 No S3, 1S4 GJ m 1011 院内 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1004 公共 No 院内 No S3, 1S4 GJ m 級 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1009 公共 No 院内 No S3, 1S4 GJ m 1011 院内 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1004 公共 No 院内 No S3, 1S4 GJ m 級 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1009 公共 No 院内 No S3, 1S4 GJ m 1011 院内 No 級 No S3, 1S4 GJ m 級 No 公共 No S3, 1S4 GJ m 1004 公共 No 院内 No S1, 1S2 GJR m 級 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1009 公共 No 院内 No S1, 1S2 GJR m 1011 院内 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1004 公共 No 院内 No S1, 1S2 GJR m 級 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1009 公共 No 院内 No S1, 1S2 GJR m 1011 院内 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1004 公共 No 院内 No S1, 1S2 GJR m 級 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1009 公共 No 院内 No S1, 1S2 GJR m 1011 院内 No 級 No S1, 1S2 GJR m 級 No 公共 No S1, 1S2 GJR m 1004 公共 No 院内 No S3, 1S4 GJR m 級 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1009 公共 No 院内 No S3, 1S4 GJR m 1011 院内 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1004 公共 No 院内 No S3, 1S4 GJR m 級 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1009 公共 No 院内 No S3, 1S4 GJR m 1011 院内 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1004 公共 No 院内 No S3, 1S4 GJR m 級 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1009 公共 No 院内 No S3, 1S4 GJR m 1011 院内 No 級 No S3, 1S4 GJR m 級 No 公共 No S3, 1S4 GJR m 1004 公共 No 院内 No
62 表 74 実用網平均計算新点位置の標準偏差 sess sat elv samp obs Time ID NAME Std.Dev. S H 1S1, 1S2 G h 級 No S1, 1S2 G h 級 No S1, 1S2 G m 級 No S1, 1S2 G m 級 No S1, 1S2 G m 級 No S1, 1S2 G m 級 No S3, 1S4 G h 級 No S3, 1S4 G h 級 No S3, 1S4 G m 級 No S3, 1S4 G m 級 No S3, 1S4 G m 級 No S3, 1S4 G m 級 No S1, 1S2 GJ h 級 No S1, 1S2 GJ h 級 No S1, 1S2 GJ m 級 No S1, 1S2 GJ m 級 No S1, 1S2 GJ m 級 No S1, 1S2 GJ m 級 No S3, 1S4 GJ h 級 No S3, 1S4 GJ h 級 No S3, 1S4 GJ m 級 No S3, 1S4 GJ m 級 No S3, 1S4 GJ m 級 No S3, 1S4 GJ m 級 No S1, 1S2 GJR h 級 No S1, 1S2 GJR h 級 No S1, 1S2 GJR m 級 No S1, 1S2 GJR m 級 No S1, 1S2 GJR m 級 No S1, 1S2 GJR m 級 No S3, 1S4 GJR h 級 No S3, 1S4 GJR h 級 No S3, 1S4 GJR m 級 No S3, 1S4 GJR m 級 No S3, 1S4 GJR m 級 No S3, 1S4 GJR m 級 No S1, 1S2 G m 級 No S1, 1S2 G m 級 No S1, 1S2 G m 級 No S1, 1S2 G m 級 No S1, 1S2 G m 級 No S1, 1S2 G m 級 No S3, 1S4 G m 級 No S3, 1S4 G m 級 No S3, 1S4 G m 級 No S3, 1S4 G m 級 No S3, 1S4 G m 級 No S3, 1S4 G m 級 No S1, 1S2 GJ m 級 No S1, 1S2 GJ m 級 No S1, 1S2 GJ m 級 No S1, 1S2 GJ m 級 No S1, 1S2 GJ m 級 No S1, 1S2 GJ m 級 No S3, 1S4 GJ m 級 No S3, 1S4 GJ m 級 No S3, 1S4 GJ m 級 No S3, 1S4 GJ m 級 No S3, 1S4 GJ m 級 No S3, 1S4 GJ m 級 No S1, 1S2 GJR m 級 No S1, 1S2 GJR m 級 No S1, 1S2 GJR m 級 No S1, 1S2 GJR m 級 No S1, 1S2 GJR m 級 No S1, 1S2 GJR m 級 No S3, 1S4 GJR m 級 No S3, 1S4 GJR m 級 No S3, 1S4 GJR m 級 No S3, 1S4 GJR m 級 No S3, 1S4 GJR m 級 No S3, 1S4 GJR m 級 No
63 仮定網平均計算によって大きな残差がないことを確認し 3 点固定の実用網平均計算を実施した 各解析条件における新点位置の標準偏差は 表 74のとおり ±10 mm 以内で非常に小さかった 実用網平均計算の結果から平面直角座標系におけるXYHを抽出し 比較した 比較の対象となる成果はGPSのみで解析した 1 時間のスタティック解析結果である それらの結果を表 75と表 76に示す 結果は 全ての解で最大 10mm 以下の較差であった これらの較差は ほぼ観測時間に比例して大きくなる傾向があった 表 75 1S1 および 1S2 における実用網平均計算結果の新点の残差 NAME sat samp obs Time dx dy dh obs Time dx dy dh obs Time dx dy dh 1 級 No1 G 30 1h m m 級 No2 G 30 1h m m 級 No1 G 15 40m m m 級 No2 G 15 40m m m 級 No1 GJ 30 1h m m 級 No2 GJ 30 1h m m 級 No1 GJ 15 40m m m 級 No2 GJ 15 40m m m 級 No1 GJR 30 1h m m 級 No2 GJR 30 1h m m 級 No1 GJR 15 40m m m 級 No2 GJR 15 40m m m 表 76 1S3 および 1S4 における実用網平均計算結果の新点の残差 NAME sat samp obs Time dx dy dh obs Time dx dy dh obs Time dx dy dh 1 級 No1 G 30 1h m m 級 No2 G 30 1h m m 級 No1 G 15 40m m m 級 No2 G 15 40m m m 級 No1 GJ 30 1h m m 級 No2 GJ 30 1h m m 級 No1 GJ 15 40m m m 級 No2 GJ 15 40m m m 級 No1 GJR 30 1h m m 級 No2 GJR 30 1h m m 級 No1 GJR 15 40m m m 級 No2 GJR 15 40m m m
64 5.4. キネマティックキネティックの観測は 表 77のとおり実施した K1 は固定局 移動局ともにJAVAD 受信機を用いて同機種で往復観測し K2~K4 を異機種で衛星のデータを取得し 解析した キネマティックで解析した基線は 図 67のとおりである 観測区分 キネマティック キネマティック 表 77 キネマティック観測記録一覧表 セッシ時刻 (UTC) 観測アンテナ高ファイル名点番号点名観測日通算日受信機名受信機番号ョン名開始終了時間 (m) RINEX Ver 院内 No /12/ :00:21 1:36:32 1:36:11 JAVAD D K1_1011_ 級 No /12/ :18:18 0:19:27 0:01:09 JAVAD D K1_0301_ 級 No /12/ :24:18 0:25:18 0:01:00 JAVAD D K1_0302_ 級 No /12/ :29:17 0:30:17 0:01:00 JAVAD D K1_0101_ 級 No /12/ :35:17 0:36:18 0:01:01 JAVAD D K1_0102_340 K 公共 No /12/ :51:17 0:52:18 0:01:01 JAVAD D K1_1002_ 公共 No /12/ :53:16 0:54:18 0:01:02 JAVAD D K1_1002_340_ 級 No /12/ :06:15 1:07:18 0:01:03 JAVAD D K1_0102_340_ 級 No /12/ :12:15 1:13:18 0:01:03 JAVAD D K1_0101_340_ 級 No /12/ :23:15 1:24:18 0:01:03 JAVAD D K1_0302_340_ 級 No /12/ :28:16 1:29:18 0:01:02 JAVAD D K1_0301_340_ 院内 No /12/ :59:04 3:31:19 1:32:15 TOPCON K2_1011_ 級 No /12/ :14:15 2:15:18 0:01:03 JAVAD D K2_0301_ 級 No /12/ :19:16 2:20:18 0:01:02 JAVAD D K2_0302_ 級 No /12/ :29:15 2:30:18 0:01:03 JAVAD D K2_0101_ 級 No /12/ :36:16 2:37:18 0:01:02 JAVAD D K2_0102_340 K 公共 No /12/ :45:15 2:46:18 0:01:03 JAVAD D K2_1002_ 公共 No /12/ :47:16 2:48:18 0:01:02 JAVAD D K2_1002_340_ 級 No /12/ :59:15 3:00:18 0:01:03 JAVAD D K2_0102_340_ 級 No /12/ :05:16 3:06:18 0:01:02 JAVAD D K2_0101_340_ 級 No /12/ :14:16 3:15:18 0:01:02 JAVAD D K2_0302_340_ 級 No /12/ :19:15 3:20:18 0:01:03 JAVAD D K2_0301_340_ 院内 No /12/ :35:16 7:50:32 2:15:16 Trimble 5135K K3_1011_ 級 No /12/ :58:18 5:59:17 0:00:59 JAVAD D K3_0301_ 級 No /12/ :10:17 6:11:17 0:01:00 JAVAD D K3_0302_ 級 No /12/ :27:18 6:28:17 0:00:59 JAVAD D K3_0101_ 級 No /12/ :39:18 6:40:17 0:00:59 JAVAD D K3_0102_340 K 公共 No /12/ :55:18 6:56:17 0:00:59 JAVAD D K3_1002_ 公共 No /12/ :57:19 6:58:18 0:00:59 JAVAD D K3_1002_340_ 級 No /12/ :20:18 7:21:17 0:00:59 JAVAD D K3_0102_340_ 級 No /12/ :30:38 7:31:37 0:00:59 JAVAD D K3_0101_340_ 級 No /12/ :36:18 7:37:17 0:00:59 JAVAD D K3_0302_340_ 級 No /12/ :40:20 7:41:18 0:00:58 JAVAD D K3_0301_340_ 院内 No /12/ :35:16 7:50:32 2:15:16 Trimble 5135K K4_1011_ 級 No /12/ :00:19 6:01:17 0:00:58 TOPCON K4_0301_ 級 No /12/ :22:17 6:23:16 0:00:59 TOPCON K4_0302_ 級 No /12/ :29:18 6:30:18 0:01:00 TOPCON K4_0101_ 級 No /12/ :41:17 6:42:16 0:00:59 TOPCON K4_0102_340 K 公共 No /12/ :00:17 7:01:17 0:01:00 TOPCON K4_1002_ 公共 No /12/ :02:16 7:03:17 0:01:01 TOPCON K4_1002_340_ 級 No /12/ :22:17 7:23:16 0:00:59 TOPCON K4_0102_340_ 級 No /12/ :32:18 7:33:16 0:00:58 TOPCON K4_0101_340_ 級 No /12/ :38:08 7:39:07 0:00:59 TOPCON K4_0302_340_ 級 No /12/ :42:17 7:43:18 0:01:01 TOPCON K4_0301_340_2 キネマティックで使用する与点は スタティックで得られた成果を用いた 成果は 緯度 経度 楕円体高を地心座標系に変換して基線解析の与点座標とした 基線解析結果を表 79~ 表 82に示す 解析時間は 約 1 分間の観測時間のうちで連続した 10 エポックのFix 解が得られたものを採用値としている 連続して 10 エポックが得られない場合は Fix 解の連続データが長いものを採用値として エポック数を記録した -91-
65 図 67 キネマティック平均図 キネマティック基線解析に用いた与点の成果は 院内 No.11 公共 No.4 公共 No.9 は 2 周波スタティックでの実用網平均計算の結果で 1 級 No.1 および 1 級 No.2 は 1 周波スタテ ィックでの実用網平均計算の結果を用いて解析した その成果を表 78に示す 表 78 キネマティック基線解析与点成果 ID NAME 緯度 経度 楕円体高 X Y Z 1011 院内 No 公共 No 公共 No 級 No 級 No キネマティックの基線解析結果の点検は 往復の基線ベクトルを比較することで点検し た 結果を 表 83 表 84に示す -92-

66 表 79 キネマティック基線解析結果 (Session:K1) -93-


67 表 80 キネマティック基線解析結果 (Session:K2) -94-



68 表 81 キネマティック基線解析結果 (Session:K3) -95-


69 表 82 キネマティック基線解析結果 (Session:K4) -96-

70 表 83 往復観測の基線較差 (K1 K2) -97-



71 表 84 往復観測の基線較差 (K3 K4) -98-
72 キネマティックの基線解析においても Fix 解が得られない基線は 1 基線ずつ衛星の状 況を確認して Fix 解が得られるように解析に使用する衛星を除外する処理を実施した しか し 観測時間が短時間なため 大きな改善が見られない基線が多かった 往復の基線が 重複する基線ベクトルの点検の許容範囲 ( 表 58 参照 ) 内である場合 以下のように固定点を定め 3 次元網平均計算し 各点の座標を求めた 1 院内 No.11 と公共 No.9 固定 1 級相当 2 院内 No.11 と 1 級 No.2 固定 2 級相当 3 院内 No.11 と 1 級 No.1 固定 3 級相当この計算によって求めた各点の成果を スタティックで求めた既知点座標およびTSで求めた 3 級基準点の座標を既知とした成果と比較し, その較差を算出した その結果を表 85 に示す 表 85 キネマティック網平均計算結果 sess ID NAME sat 等級 dx dy dh 等級 dx dy dh 等級 dx dy dh K 級 No1 G 1 級 2 級 3 級 K 級 No2 G 1 級 2 級 級 K 級 No1 G 1 級 2 級 K 級 No2 G 1 級 K 級 No1 GJ 1 級 2 級 3 級 K 級 No2 GJ 1 級 2 級 級 K 級 No1 GJ 1 級 2 級 K 級 No2 GJ 1 級 K 級 No1 GJR 1 級 2 級 3 級 K 級 No2 GJR 1 級 級 級 K 級 No1 GJR 1 級 級 K 級 No2 GJR 1 級 K 級 No1 G 1 級 2 級 3 級 K 級 No2 G 1 級 2 級 3 級 K 級 No1 G 1 級 2 級 K 級 No2 G 1 級 K 級 No1 GJ 1 級 級 級 K 級 No2 GJ 1 級 級 級 K 級 No1 GJ 1 級 級 K 級 No2 GJ 1 級 K 級 No1 GJR 1 級 級 級 K 級 No2 GJR 1 級 級 級 K 級 No1 GJR 1 級 級 K 級 No2 GJR 1 級 K 級 No1 G 1 級 2 級 3 級 K 級 No2 G 1 級 2 級 3 級 K 級 No1 G 1 級 2 級 K 級 No2 G 1 級 K 級 No1 GJ 1 級 2 級 3 級 K 級 No2 GJ 1 級 2 級 3 級 K 級 No1 GJ 1 級 2 級 K 級 No2 GJ 1 級 K 級 No1 GJR 1 級 2 級 3 級 K 級 No2 GJR 1 級 級 級 K 級 No1 GJR 1 級 級 K 級 No2 GJR 1 級 K 級 No1 G 1 級 2 級 3 級 K 級 No2 G 1 級 級 級 K 級 No1 G 1 級 級 K 級 No2 G 1 級 K 級 No1 GJ 1 級 2 級 3 級 K 級 No2 GJ 1 級 級 級 K 級 No1 GJ 1 級 級 K 級 No2 GJ 1 級 K 級 No1 GJR 1 級 2 級 3 級 K 級 No2 GJR 1 級 級 級 K 級 No1 GJR 1 級 級 K 級 No2 GJR 1 級
73 空欄は 固定とする基線解析あるいは当該箇所において解が得られなかった あるいは 往復の基線ベクトルの較差が許容範囲を超えていたことを示す 全体的な傾向としては 3 級 No.1 の解が得られない傾向である また 比較的使用する衛星が増加する つまり準天頂衛星や GLONASS 衛星を追加することによって 解が得られる傾向であった トータル ステーションによる 3 級基準点測量 図 68 3 級基準点 TS 観測 _ 平均図 キネマティックと比較する基準成果として TSで観測を実施した 図 68のとおり平均計算を行い 基準成果を求めた 得られた成果を表 86に示す この基準成果を使用して キネマティックの成果と比較して評価を行った -100-
74 表 86 トータル ステーションによる基準点成果 ID NAME X(N) Y(E) H geoid 級 No 級 No 級 No 院内 No 上空視界不良地域 上空視界不良地域は 新点 4 点として計算を実施した 基線解析は キネマティックモ ードで 1 時間の観測データを解析し衛星配置の違いにより 刻々と Fix 解や Float 解が変 わるのを確認することを目的とした ただし 採用値は 1 時間の Fix 解の平均値として基 線解析の集計を実施した 基線解析は 4 点 6 基線を解析した GNSS 受信機は 全て JAVAD 受信機を用いて観測を実施している 表 87 上空視界不良地域観測記録一覧表 観測セッシ時刻 (UTC) 観測アンテナ高ファイル名点番号点名観測日通算日受信機名受信機番号区分ョン名開始終了時間 (m) RINEX Ver.2.12 上 1011 院内 No /11/ :03:00 2:16:30 2:13:30 JAVAD D F1_1011_332 空 5001 CS1 2012/11/ :00:30 2:15:30 2:15:00 JAVAD D F1_5001_332 F1 視 5002 CS2 2012/11/ :00:30 2:15:30 2:15:00 JAVAD D F1_5002_332 界 5003 OS1 2012/11/ :00:30 2:17:00 2:16:30 JAVAD S F1_5003_332 不 1011 院内 No /11/ :33:30 7:51:30 2:18:00 JAVAD D F2_1011_332 良 5001 CS1 2012/11/ :30:30 7:50:30 2:20:00 JAVAD D F2_5001_332 地 F CS2 2012/11/ :31:00 7:50:30 2:19:30 JAVAD D F2_5002_332 域 5003 OS1 2012/11/ :30:30 7:51:00 2:20:30 JAVAD S F2_5003_332 図 69 上空視界不良地域平均図 GNSS 観測は 2 セッション実施したが セッション間の時間を長くして衛星配置を変える必要があったため セッションの間の時間を利用して TS による測量によって 各測点の基準成果を求めた 上空視界不良地域の基線解析結果を表 88に示す 上空視界不良地域においては Fix 解が得られていても TSから求めた成果より数 mの較差がある基線があった -101-




75 表 88 上空視界不良地域 _ 基線解析結果 -102-
76 トータル ステーションによる上空視界不良地域の観測 図 70 上空視界不良地域 TS による観測 _ 平均図 表 89 TS による網平均計算 Name ID 緯度 経度 楕円体高 CS CS OS No TSによる観測は 院内 No.11 とOpenSky1(OS1) を電子基準点 守谷 から求め, 開放トラバーでCloseSky1(CS1) 及びCloseSky2(CS2) の基準成果を求めた TS 観測による基準成果は 表 89のとおりである -103-
マルチGNSS解析に関する技術指針
 マルチ GNSS 解析に関する技術指針 検討資料作成業務 報告書 平成 25 年 3 月 国土交通省国土地理院 目次 1. 目的... 1 2. 概要... 1 2.1. 全世界的衛星測位システム (GNSS)... 1 2.2. 準天頂衛星システム (QZSS)... 1 2.3. マルチGNSS 業務概要... 4 3. 解析用データの取得... 5 3.1. 比較基線場におけるGNSS 観測...
マルチ GNSS 解析に関する技術指針 検討資料作成業務 報告書 平成 25 年 3 月 国土交通省国土地理院 目次 1. 目的... 1 2. 概要... 1 2.1. 全世界的衛星測位システム (GNSS)... 1 2.2. 準天頂衛星システム (QZSS)... 1 2.3. マルチGNSS 業務概要... 4 3. 解析用データの取得... 5 3.1. 比較基線場におけるGNSS 観測...
Microsoft Word - 【マルチ&QZSS対応】電子基準点のみ基準点測量マニュアル(平成27年7月22日改)
") 国土地理院技術資料 A1-No.367 電子基準点のみを既知点とした 基準点測量マニュアル 平成 27 年 7 月 国土交通省国土地理院 目 次 [ 序 ] 概説 1 1. はじめに 1 2. マニュアルの利用について 1 3. 作業実施にあたっての手続 1 第 1 章総則 2 第 2 章電子基準点のみを既知点とした 2 級基準点測量 3 第 1 節要旨 3 第 2 節作業計画 4 第 3 節選点
国土地理院技術資料 A1-No.367 電子基準点のみを既知点とした 基準点測量マニュアル 平成 27 年 7 月 国土交通省国土地理院 目 次 [ 序 ] 概説 1 1. はじめに 1 2. マニュアルの利用について 1 3. 作業実施にあたっての手続 1 第 1 章総則 2 第 2 章電子基準点のみを既知点とした 2 級基準点測量 3 第 1 節要旨 3 第 2 節作業計画 4 第 3 節選点
Microsoft PowerPoint - ネットワーク型RTK-GPS 利用方法.pptx
 ネットワーク型 RTK-GPS を 利用する運用基準について GPS を利用する測量方法 静止測量 ( スタティック法 ) 電子基準点を利用した静止測量 123A 123B 特徴 高精度である (5mm) 複数台の GPS が必要となる 基準点が必要である 基準点踏査が必要である 1 時間程度の観測が必要 リアルタイムキネマティック測量 (RTK 法 ) 特徴 高精度である (5mm) 基準点踏査不要
ネットワーク型 RTK-GPS を 利用する運用基準について GPS を利用する測量方法 静止測量 ( スタティック法 ) 電子基準点を利用した静止測量 123A 123B 特徴 高精度である (5mm) 複数台の GPS が必要となる 基準点が必要である 基準点踏査が必要である 1 時間程度の観測が必要 リアルタイムキネマティック測量 (RTK 法 ) 特徴 高精度である (5mm) 基準点踏査不要
測量士補 重要事項 はじめに GNSS測量の基礎
 GNSS 測量の基礎 (1)GNSS とは GNSS(Global Navigation Satellite Systems: 全地球衛星航法 ( または測位 ) システム ) 測量とは いわゆるカーナビを想像すればよい つまり 上空の衛星から発射される電波を受信する事により 地上の位置を求める測量である 衛星として代表的なものは アメリカの GPS 衛星であるが その他にも次のようなものがある アメリカの
GNSS 測量の基礎 (1)GNSS とは GNSS(Global Navigation Satellite Systems: 全地球衛星航法 ( または測位 ) システム ) 測量とは いわゆるカーナビを想像すればよい つまり 上空の衛星から発射される電波を受信する事により 地上の位置を求める測量である 衛星として代表的なものは アメリカの GPS 衛星であるが その他にも次のようなものがある アメリカの
GPS仰角15度
 SPAC シンポジウム 2012 GPS, QZS, GLONASS を利用した 高精度測位の現状 2012 年 11 月 21 日 幹事細谷素之 協議会の目的 ( 以下 協議会 という ) は 国土交通省国土地理院が所有する電子基準点リアルタイムデータの民間開放を要望するとともに リアルタイムデータの利活用と普及を推進することを目的として平成 13 年 11 月に設立されました 2 電子基準点を利用した
SPAC シンポジウム 2012 GPS, QZS, GLONASS を利用した 高精度測位の現状 2012 年 11 月 21 日 幹事細谷素之 協議会の目的 ( 以下 協議会 という ) は 国土交通省国土地理院が所有する電子基準点リアルタイムデータの民間開放を要望するとともに リアルタイムデータの利活用と普及を推進することを目的として平成 13 年 11 月に設立されました 2 電子基準点を利用した
Microsoft Word - NS-Surveyマニュアル_Ver1.2.1_.doc
 後処理基線解析ソフトウェア (NS-Survey) 操作マニュアル 2006/11/17 Ver1.2.1 公共測量への PCV 補正 (GPS スタティック測量 ) 対応版 日本 GPS ソリューションズ株式会社 1. はじめに 基線解析ソフトウェア (NS-Survey) は NetSurv2000 または NetSurv3000 シリーズで観測した静止測量データのインポート 基線解析および各種帳票出力を行うソフトウェアです
後処理基線解析ソフトウェア (NS-Survey) 操作マニュアル 2006/11/17 Ver1.2.1 公共測量への PCV 補正 (GPS スタティック測量 ) 対応版 日本 GPS ソリューションズ株式会社 1. はじめに 基線解析ソフトウェア (NS-Survey) は NetSurv2000 または NetSurv3000 シリーズで観測した静止測量データのインポート 基線解析および各種帳票出力を行うソフトウェアです
<4D F736F F F696E74202D2091AA88CA91E589EF8D E9197BF62208E E707074>
 RTK-GPS/GLONASS における 受信機間 inter-channel bias の calibration とその評価 東京海洋大学山田英輝 発表内容 研究の背景と目的 バイアス較正実験概要 実験結果及び考察 RTK 測位への適用 まとめ 移動体 RTK 測位結果 ( 周波 + 瞬時 AR) Only GPS Fix solution: 5 % Float solution: 4 % NovAtel
RTK-GPS/GLONASS における 受信機間 inter-channel bias の calibration とその評価 東京海洋大学山田英輝 発表内容 研究の背景と目的 バイアス較正実験概要 実験結果及び考察 RTK 測位への適用 まとめ 移動体 RTK 測位結果 ( 周波 + 瞬時 AR) Only GPS Fix solution: 5 % Float solution: 4 % NovAtel
<936F8B4C8AEE8F80935F90BB967B D2816A E20312E30312E786C73>
 計算 1 基線解析 PCV 補正固定点の決定 セミダイナミック補正 ( 有 無 ) 平均計算で使用する重量の決定 ( 固定値又は基線解析で求められた値 ) 固定点データ入力 -X 座標 Y 座標 標高入力 アンテナ高編集 基線長 10km 未満 -1 周波 基線長 10km 以上 -2 周波解析するベクトルを選択 データの棄却率が30% 以内である (30% を超える場合は再測が必要 ) 解析結果評価
計算 1 基線解析 PCV 補正固定点の決定 セミダイナミック補正 ( 有 無 ) 平均計算で使用する重量の決定 ( 固定値又は基線解析で求められた値 ) 固定点データ入力 -X 座標 Y 座標 標高入力 アンテナ高編集 基線長 10km 未満 -1 周波 基線長 10km 以上 -2 周波解析するベクトルを選択 データの棄却率が30% 以内である (30% を超える場合は再測が必要 ) 解析結果評価
Microsoft Word - マルチGMNSS測量マニュアル(案)解説_確定版(2)
解説_確定版(2)") マルチ GNSS 測量マニュアル ( 案 ) ー近代化 GPS Galileo 等の活用ー 解説 平成 27 年 8 月 国土交通省国土地理院 目次 はじめに 1 1. 概説について 2 1-1. マルチ GNSSの利用により期待される効果 2 1-2.3 周波測位で期待される効果 3 1-3. マニュアルの利用について 4 1-4. 統合処理について 5 1-4-1. 統合処理の概要 5 1-4-2.
マルチ GNSS 測量マニュアル ( 案 ) ー近代化 GPS Galileo 等の活用ー 解説 平成 27 年 8 月 国土交通省国土地理院 目次 はじめに 1 1. 概説について 2 1-1. マルチ GNSSの利用により期待される効果 2 1-2.3 周波測位で期待される効果 3 1-3. マニュアルの利用について 4 1-4. 統合処理について 5 1-4-1. 統合処理の概要 5 1-4-2.
国土地理院時報124.indb
 65 測量の効率化 低コスト化を実現 - スマート サーベイ プロジェクトの取り組み - Realization of Efficient and Low-cost Surveys -Approach of Smart Survey Project- 測地部後藤清 林保 飯村友三郎 1 越智久巳一 日下正明 2 岩田和美 井上武久 3 宮本純一 佐藤雄大 河和宏 Geodetic Department
65 測量の効率化 低コスト化を実現 - スマート サーベイ プロジェクトの取り組み - Realization of Efficient and Low-cost Surveys -Approach of Smart Survey Project- 測地部後藤清 林保 飯村友三郎 1 越智久巳一 日下正明 2 岩田和美 井上武久 3 宮本純一 佐藤雄大 河和宏 Geodetic Department
<4D F736F F D E53538B5A8F DB88FD896BE95F18D908F BB967B8CB48D65815E B835793FC82E8816A2E646F6
 序 建設技術審査証明事業 ( 測量技術 ) は 民間において自主的に開発された新しい建設技術の活用促進に寄与することを目的として創設した事業である 社団法人日本測量協会は 建設技術審査証明協議会の会員として その技術の性能などを客観的に審査して証明することで信頼性を高め 普及を後押しする仕組みとして事業を行っている 当協会では 測量に関する機器 データの取得 処理等の技術および 測量とその関連システムの開発技術を審査の対象としており
序 建設技術審査証明事業 ( 測量技術 ) は 民間において自主的に開発された新しい建設技術の活用促進に寄与することを目的として創設した事業である 社団法人日本測量協会は 建設技術審査証明協議会の会員として その技術の性能などを客観的に審査して証明することで信頼性を高め 普及を後押しする仕組みとして事業を行っている 当協会では 測量に関する機器 データの取得 処理等の技術および 測量とその関連システムの開発技術を審査の対象としており
測量士補 重要事項 基準点測量 基準点測量の作業工程
 < 試験合格へのポイント > 基準点測量の作業工程 基準点測量の作業工程は トータルステーション ( 以下 TS) による方法 と GNSS 測量機による方法 の 2 つに大別されるが ここでは特に気にせず 基準点測量における作業工程 として覚えればよい また 作業工程を詳細に分類した形式についても過去に出題されることがあるが 全体的な流れをしっかりとつかんでおけば問題はない ( : 最重要事項 :
< 試験合格へのポイント > 基準点測量の作業工程 基準点測量の作業工程は トータルステーション ( 以下 TS) による方法 と GNSS 測量機による方法 の 2 つに大別されるが ここでは特に気にせず 基準点測量における作業工程 として覚えればよい また 作業工程を詳細に分類した形式についても過去に出題されることがあるが 全体的な流れをしっかりとつかんでおけば問題はない ( : 最重要事項 :
測量機器性能基準
 測量機器性能基準 測量機器性能基準 平成 13 年 3 月 29 日国地達第 2 8 号 改正平成 16 年 5 月 19 日国地達第 19 号改正平成 18 年 2 月 10 日国地達第 3 号改正平成 23 年 3 月 10 日国地達第 6 号改正平成 28 年 3 月 28 日国地達第 7 号 目 次 第 1 章総則 ( 第 1 条 ~ 第 5 条 ) 目的 ( 第 1 条 ) 1 適用範囲及び種類
測量機器性能基準 測量機器性能基準 平成 13 年 3 月 29 日国地達第 2 8 号 改正平成 16 年 5 月 19 日国地達第 19 号改正平成 18 年 2 月 10 日国地達第 3 号改正平成 23 年 3 月 10 日国地達第 6 号改正平成 28 年 3 月 28 日国地達第 7 号 目 次 第 1 章総則 ( 第 1 条 ~ 第 5 条 ) 目的 ( 第 1 条 ) 1 適用範囲及び種類
測量士補重要事項 基準点測量 GNSS測量
 GNSS 測量 < 試験合格へのポイント > GNSS( 旧 GPS) 1 2 に関する問題は 基準点測量や地形測量など GNSS を用いる分野全てに 数多く出題されている いわば 定番問題 となっている GNSS であるが 一部の例外を除きその出題内容は GNSS 測量に関する基礎的なものに留まっており この基礎的な事項を理解しておけば 比較的解答しやすい問題であると言える 枝問の一部には 実務で扱っていないと解らない
GNSS 測量 < 試験合格へのポイント > GNSS( 旧 GPS) 1 2 に関する問題は 基準点測量や地形測量など GNSS を用いる分野全てに 数多く出題されている いわば 定番問題 となっている GNSS であるが 一部の例外を除きその出題内容は GNSS 測量に関する基礎的なものに留まっており この基礎的な事項を理解しておけば 比較的解答しやすい問題であると言える 枝問の一部には 実務で扱っていないと解らない
Microsoft Word - NS-Networkマニュアル_Ver1.5.1_.doc
 三次元網平均計算ソフトウェア (NS-Network) 操作マニュアル 2006/11/17 Ver1.5.1 ネットワーク型 RTK-GPS を利用する公共測量作業マニュアル ( 案 ) 対応版 日本 GPS ソリューションズ株式会社 1. はじめに RTK/VRS-RTK 用三次元網平均ソフトウェア (NS-Network) は 基線解析ソフトウェア (NS-Survey) または RTK/VRS-RTK
三次元網平均計算ソフトウェア (NS-Network) 操作マニュアル 2006/11/17 Ver1.5.1 ネットワーク型 RTK-GPS を利用する公共測量作業マニュアル ( 案 ) 対応版 日本 GPS ソリューションズ株式会社 1. はじめに RTK/VRS-RTK 用三次元網平均ソフトウェア (NS-Network) は 基線解析ソフトウェア (NS-Survey) または RTK/VRS-RTK
Microsoft Word - 【改正】GNSS水準測量マニュアル(平成29年2月27日改)(本文・黒)
(本文・黒)") 国土地理院技術資料 A1-No.368 GNSS 測量による標高の測量マニュアル 平成 29 年 2 月 国土交通省国土地理院 目 次 [ 序 ] 概説 1 1. はじめに 1 2. マニュアルの利用について 1 3.GNSS 水準測量を実施するにあたっての手続き 1 第 1 章総則 2 第 2 章 GNSS 水準測量 3 第 1 節要旨 3 第 2 節選点 4 第 3 節測量標の設置 4 第 4
国土地理院技術資料 A1-No.368 GNSS 測量による標高の測量マニュアル 平成 29 年 2 月 国土交通省国土地理院 目 次 [ 序 ] 概説 1 1. はじめに 1 2. マニュアルの利用について 1 3.GNSS 水準測量を実施するにあたっての手続き 1 第 1 章総則 2 第 2 章 GNSS 水準測量 3 第 1 節要旨 3 第 2 節選点 4 第 3 節測量標の設置 4 第 4
Microsoft PowerPoint tokura.pptx
 国産の衛星測位システムによる 3 衛星測位 海事システム工学科情報コース 8143 土倉弘子 背景と目的 現在の衛星測位システム 日本の衛星測位システム 測位計算の理論と概要 3 衛星測位計算 座標系 衛星配置 実験 静止実験 移動体実験 まとめ 目次 1 背景と目的 衛星測位システムの普及 個人利用から社会インフラ 国民生活に 必要不可欠 GNSS (Global Navigation Satellite
国産の衛星測位システムによる 3 衛星測位 海事システム工学科情報コース 8143 土倉弘子 背景と目的 現在の衛星測位システム 日本の衛星測位システム 測位計算の理論と概要 3 衛星測位計算 座標系 衛星配置 実験 静止実験 移動体実験 まとめ 目次 1 背景と目的 衛星測位システムの普及 個人利用から社会インフラ 国民生活に 必要不可欠 GNSS (Global Navigation Satellite
RTKLIBによる解析
 RTKLIB による解析 1. 計画 2. 測量 3. 解析 内山庄一郎 ( 国立研究開発法人防災科学技術研究所 ) [email protected] RTKLIB による解析 1. 計画 2. 測量 3. 解析 成功は ( 失敗は ) その時点で約束されている L1-DGNSS と RTKLIB による PPK 解析 : はじめに GNSSで観測したBaseとRover のデータを使って
RTKLIB による解析 1. 計画 2. 測量 3. 解析 内山庄一郎 ( 国立研究開発法人防災科学技術研究所 ) [email protected] RTKLIB による解析 1. 計画 2. 測量 3. 解析 成功は ( 失敗は ) その時点で約束されている L1-DGNSS と RTKLIB による PPK 解析 : はじめに GNSSで観測したBaseとRover のデータを使って
スライド 1
 AZER ZONE Station LZ-S5 ( 固定局 ) LAZER ZONE Receiver LZ-R5 ( 移動局 ) 目次 プログラム起動 ( 使用上の注意 ) 3 現場設定 4 GNSS 設定 5 観測設定 6 観測オプション設定 7 一点後方交会用座標入力 8 移動局 固定局の初期化 9 一点後方交会 10 観測 11 路線設置 ~ 路線データ作成 ~ 14 路線設置 ~ 測設誘導
AZER ZONE Station LZ-S5 ( 固定局 ) LAZER ZONE Receiver LZ-R5 ( 移動局 ) 目次 プログラム起動 ( 使用上の注意 ) 3 現場設定 4 GNSS 設定 5 観測設定 6 観測オプション設定 7 一点後方交会用座標入力 8 移動局 固定局の初期化 9 一点後方交会 10 観測 11 路線設置 ~ 路線データ作成 ~ 14 路線設置 ~ 測設誘導
バージョンアップガイド(Ver.7→Ver.7.1)
") バージョンアップガイド (Ver.7 Ver.7.1) Mercury Evoluto Ver.7 から Ver.7.1 へのバージョンアップ内容をご紹介しています 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 バージョンアップガイド Mercury Evoluto (Ver.7 Ver.7.1) 1 現場管理 P.2 1-1 現場区分の表記を変更 2 2 測量計算
バージョンアップガイド (Ver.7 Ver.7.1) Mercury Evoluto Ver.7 から Ver.7.1 へのバージョンアップ内容をご紹介しています 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 バージョンアップガイド Mercury Evoluto (Ver.7 Ver.7.1) 1 現場管理 P.2 1-1 現場区分の表記を変更 2 2 測量計算
402_トラバース計算
 トラバース計算 [ トラバース ] の解説例として 座標を入力してプロット図を作成した後 新規トラバース点を作成し トラバース網図を作成するまでの一連の流れを簡単なサンプルを用いて解説します 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 トラバース計算 トラバース計算. 入力例の説明 - 入力例の流れ図. 座標の入力 - [ 建設 CAD] を起動する - 座標を入力する.
トラバース計算 [ トラバース ] の解説例として 座標を入力してプロット図を作成した後 新規トラバース点を作成し トラバース網図を作成するまでの一連の流れを簡単なサンプルを用いて解説します 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 トラバース計算 トラバース計算. 入力例の説明 - 入力例の流れ図. 座標の入力 - [ 建設 CAD] を起動する - 座標を入力する.
武蔵12_体験版操作説明書(トラバース計算)
") 体験版操作説明書 トラバース計算 [ トラバース計算 ] の解説例として 座標を入力してプロット図を作成した後 新規トラバース点を作成し トラバース網図を作成するまでの一連の流れを簡単なサンプルを用いて解説します 解説内容がオプションプログラムの説明である場合があります ご了承ください トラバース計算 参考資料 ( 他の計算種類のサンプルデータ )...6 トラバース計算 目次 トラバース計算. 入力例の説明
体験版操作説明書 トラバース計算 [ トラバース計算 ] の解説例として 座標を入力してプロット図を作成した後 新規トラバース点を作成し トラバース網図を作成するまでの一連の流れを簡単なサンプルを用いて解説します 解説内容がオプションプログラムの説明である場合があります ご了承ください トラバース計算 参考資料 ( 他の計算種類のサンプルデータ )...6 トラバース計算 目次 トラバース計算. 入力例の説明
<4D F736F F F696E74202D2091AA926E90AC89CA C98F808B9282B582BD8AEE8F80935F91AA97CA205B8CDD8AB B83685D>
 測地成果 2011 に準拠した基準点測量 有限会社ジオプランニング 1 測地成果 2011 に準拠した基準点測量 有限会社ジオプランニング 1 目次 2 東北地方太平洋沖地震に伴う地殻変動 ( 水平 ) 東北地方太平洋沖地震に伴う地殻変動 ( 上下 ) 最大東南東に 5.3m 最大 1.2m 沈降 3 4 1 東北地方太平洋沖地震に伴う地殻変動 目次 地震断層モデル プレート境界面上の滑り推定量 長さ
測地成果 2011 に準拠した基準点測量 有限会社ジオプランニング 1 測地成果 2011 に準拠した基準点測量 有限会社ジオプランニング 1 目次 2 東北地方太平洋沖地震に伴う地殻変動 ( 水平 ) 東北地方太平洋沖地震に伴う地殻変動 ( 上下 ) 最大東南東に 5.3m 最大 1.2m 沈降 3 4 1 東北地方太平洋沖地震に伴う地殻変動 目次 地震断層モデル プレート境界面上の滑り推定量 長さ
目次 1. 図郭のCSVから矩形シェープファイル保存... i 1.1. 変換元のCSVファイル... i 1.2. ダイアログ... i 1.3. 作成するシェープファイル... ii 2. 図郭 TIN DEM 保存 ダイアログ TINについて... 3
 地物のシェープファイルから CSV 作成説明書 2012/06/07 有限会社ジオ コーチ システムズ http://www.geocoach.co.jp/ [email protected] 等高線や標高点のシェープファイルから TIN を発生し グリッドの XYZ の CSV ファイルを作成します 地物のシェープファイル 図郭別 CSV ファイル 等高線 標高点 範囲指定シェープファイル TIN
地物のシェープファイルから CSV 作成説明書 2012/06/07 有限会社ジオ コーチ システムズ http://www.geocoach.co.jp/ [email protected] 等高線や標高点のシェープファイルから TIN を発生し グリッドの XYZ の CSV ファイルを作成します 地物のシェープファイル 図郭別 CSV ファイル 等高線 標高点 範囲指定シェープファイル TIN
GPS/GNSS: Satellite Navigation
 海外の精密測位 - 準天頂衛星への期待と大学間連携 - MADOCA 利用検討会 2016 年 3 月 29 日 久保信明 ( 東京海洋大学 ) 1 海外連携基準点の例 ( アジア ) フィリピン大学 ( マニラ ) インドネシア大学 ( ジャカルタ ) 東京海洋大学 ( 東京 ) 準天頂衛星 1 つをみても見え方は異なる 現段階で BEIDOU は高仰角に多数 2 これまでに設置してきた大学 チュラロンコン大学
海外の精密測位 - 準天頂衛星への期待と大学間連携 - MADOCA 利用検討会 2016 年 3 月 29 日 久保信明 ( 東京海洋大学 ) 1 海外連携基準点の例 ( アジア ) フィリピン大学 ( マニラ ) インドネシア大学 ( ジャカルタ ) 東京海洋大学 ( 東京 ) 準天頂衛星 1 つをみても見え方は異なる 現段階で BEIDOU は高仰角に多数 2 これまでに設置してきた大学 チュラロンコン大学
Microsoft Word - 03基準点成果表
 基準点成果表 ( 情報 ) < 試験合格へのポイント > 基準点成果表 ( 又は 基準点成果情報 ) に関する問題である 近年では 基準点成果表の項目 ( 内容 ) に関する問題よりは 平面直角座標系に絡めた問題が出題されているため 平面直角座標系の特徴も併せて覚える方か良い ここでは 水準点を除くものを基準点として記述する 基準点について ( : 最重要事項 : 重要事項 : 知っておくと良い )
基準点成果表 ( 情報 ) < 試験合格へのポイント > 基準点成果表 ( 又は 基準点成果情報 ) に関する問題である 近年では 基準点成果表の項目 ( 内容 ) に関する問題よりは 平面直角座標系に絡めた問題が出題されているため 平面直角座標系の特徴も併せて覚える方か良い ここでは 水準点を除くものを基準点として記述する 基準点について ( : 最重要事項 : 重要事項 : 知っておくと良い )
地籍基本調査成果電子納品要領(案)平成24年10月版対応について
平成24年10月版対応について") 地籍基本調査成果電子納品要領 ( 案 ) 平成 24 年 10 月版対応について WingneoINFINITY ver2.10(tp2) にて 地籍基本調査成果電子納品要領 ( 案 ) 平成 24 年 10 月版 に 今要領案の成果の作成に際し 注意点と地籍基本調査成果簿出力フォーマット作成についてご案内いたします 成果管理にて今要領案の成果を作成する際には 成果ダイレクト電納の 官民境界等先行型調査成果電納
地籍基本調査成果電子納品要領 ( 案 ) 平成 24 年 10 月版対応について WingneoINFINITY ver2.10(tp2) にて 地籍基本調査成果電子納品要領 ( 案 ) 平成 24 年 10 月版 に 今要領案の成果の作成に際し 注意点と地籍基本調査成果簿出力フォーマット作成についてご案内いたします 成果管理にて今要領案の成果を作成する際には 成果ダイレクト電納の 官民境界等先行型調査成果電納
Microsoft Word - M8P_miniEVKボードによるRTKマニュアル.docx
 M8P mini-evk ボードによる RTK マニュアル 2016/08/27 A 版 2016/09/03 目次 1. ハードウェアの接続及び設置... 1 2. 受信機の設定... 2 2.1 u-center 及び u-blox 受信機ドライバのインストール... 2 2.2 基準局受信機の設定... 3 2.3 移動局 ( ローバー ) 受信機の設定... 5 3. ソフトウェアの設定...
M8P mini-evk ボードによる RTK マニュアル 2016/08/27 A 版 2016/09/03 目次 1. ハードウェアの接続及び設置... 1 2. 受信機の設定... 2 2.1 u-center 及び u-blox 受信機ドライバのインストール... 2 2.2 基準局受信機の設定... 3 2.3 移動局 ( ローバー ) 受信機の設定... 5 3. ソフトウェアの設定...
屋内 3 次元 測位 + 地図 総合技術開発 現状 屋内 3 次元測位統一的な測位手法 情報交換手順がなく 共通の位置情報基盤が効率的に整備されない 技術開発 屋内外のシームレス測位の実用化 (1) 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内
 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内") 資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
BTXAV7バージョンアップガイド
 バージョンアップガイド (2016R1 Ver.7) BLUETREND XA 2016R1 から Ver.7 へのバージョンアップ内容をご紹介しています 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 バージョンアップガイド BLUETREND XA (2016R1 Ver.7) 1 メイン 共通 P.2 1-1 印刷コマンドの統合 2 2 CAD P.3 2-1
バージョンアップガイド (2016R1 Ver.7) BLUETREND XA 2016R1 から Ver.7 へのバージョンアップ内容をご紹介しています 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 バージョンアップガイド BLUETREND XA (2016R1 Ver.7) 1 メイン 共通 P.2 1-1 印刷コマンドの統合 2 2 CAD P.3 2-1
<4D F736F F F696E74202D20322D32305F8F B AF4C312D E28BAD904D8D8682CC474C4F4E CE899E205B8CDD8AB783828
 第 14 回電子航法研究所研究発表会 June 6, 2014 20. 準天頂衛星 L1-SAIF 補強信号の GLONASS 対応 航法システム領域坂井丈泰 星野尾一明 伊藤憲 June 2014 - Slide 1 はじめに 準天頂衛星システム (QZSS): 準天頂衛星軌道上の測位衛星による衛星測位サービス GPS 補完信号に加え 補強信号を放送 補強信号 :L1-SAIF LEX の 2 種類
第 14 回電子航法研究所研究発表会 June 6, 2014 20. 準天頂衛星 L1-SAIF 補強信号の GLONASS 対応 航法システム領域坂井丈泰 星野尾一明 伊藤憲 June 2014 - Slide 1 はじめに 準天頂衛星システム (QZSS): 準天頂衛星軌道上の測位衛星による衛星測位サービス GPS 補完信号に加え 補強信号を放送 補強信号 :L1-SAIF LEX の 2 種類
<90E096BE8F912E786C7378>
 コンパス togis.xls 説明書 画面構成 2: 属性入力 3: プレビュー画面 6: 各種ツール 4: データベース 5: ファイル出力 1: 測量成果入力 1 測量成果入力 濃い黄色の部分に入力された測量成果が図形になる 右の BP1~BP10 までの欄は 分割して測量した場合に使用する [ 表のクリア ]: 現在入力されている値を消去する セル移動制御 :Enter キーで移動する順番を制御する
コンパス togis.xls 説明書 画面構成 2: 属性入力 3: プレビュー画面 6: 各種ツール 4: データベース 5: ファイル出力 1: 測量成果入力 1 測量成果入力 濃い黄色の部分に入力された測量成果が図形になる 右の BP1~BP10 までの欄は 分割して測量した場合に使用する [ 表のクリア ]: 現在入力されている値を消去する セル移動制御 :Enter キーで移動する順番を制御する
【資料3-2】光格子時計の測地分野での利用可能性
 資料 3-2 科学技術 学術審議会先端研究基盤部会量子科学技術委員会 ( 第 3 回 ) 平成 28 年 5 月 1 日 平成 28 年 5 月 1 日第 3 回量子科学技術委員会 光格子時計の測地分野での利用可能性 国土交通省国土地理院測地部物理測地課矢萩智裕 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information
資料 3-2 科学技術 学術審議会先端研究基盤部会量子科学技術委員会 ( 第 3 回 ) 平成 28 年 5 月 1 日 平成 28 年 5 月 1 日第 3 回量子科学技術委員会 光格子時計の測地分野での利用可能性 国土交通省国土地理院測地部物理測地課矢萩智裕 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information
目 次 1. はじめに 動作システム 起動方法 本ツールの機能 計算方法 使用方法 緯度 経度への換算 平面直角座標への変換 一度に計算可能なデータ数と追加方法
 平面直角座標 緯度経度相互変換ツール xy2keido マニュアル (ver1.00) CIVIL WORKS 目 次 1. はじめに... 3 2. 動作システム... 3 3. 起動方法... 3 4. 本ツールの機能... 4 5. 計算方法... 4 6. 使用方法... 5 6-1. 緯度 経度への換算... 5 6-2. 平面直角座標への変換... 8 6-3. 一度に計算可能なデータ数と追加方法...
平面直角座標 緯度経度相互変換ツール xy2keido マニュアル (ver1.00) CIVIL WORKS 目 次 1. はじめに... 3 2. 動作システム... 3 3. 起動方法... 3 4. 本ツールの機能... 4 5. 計算方法... 4 6. 使用方法... 5 6-1. 緯度 経度への換算... 5 6-2. 平面直角座標への変換... 8 6-3. 一度に計算可能なデータ数と追加方法...
(Microsoft Word - TBC\221\200\215\354\203K\203C\203hRev,A.doc)
") Trimbl e Business C en ter はじめに本書では TBC で静止測量 VRS 観測における解析とレポート出力 座標データ出力についての基本的な操作方法を説明しています 詳しい設定 操作方法はヘルプなどを参照してください Trimble Business Center(TBC) 目次 準備... 2 プロジェクトフォルダの準備... 2 静止測量データや後処理キネマティック (PPK)
Trimbl e Business C en ter はじめに本書では TBC で静止測量 VRS 観測における解析とレポート出力 座標データ出力についての基本的な操作方法を説明しています 詳しい設定 操作方法はヘルプなどを参照してください Trimble Business Center(TBC) 目次 準備... 2 プロジェクトフォルダの準備... 2 静止測量データや後処理キネマティック (PPK)
2_時報120.indd
 55 Towards the Introduction of Semi-Dynamic Correction 測地部檜山洋平 森下遊 山尾裕美 湯通堂亨 越智久巳一 Geodetic Department Yohei HIYAMA, Yu MORISHITA, Hiromi YAMAO, Toru YUTSUDO and Kumikazu OCHI 中部地方測量部岩田昭雄 Chubu Regional
55 Towards the Introduction of Semi-Dynamic Correction 測地部檜山洋平 森下遊 山尾裕美 湯通堂亨 越智久巳一 Geodetic Department Yohei HIYAMA, Yu MORISHITA, Hiromi YAMAO, Toru YUTSUDO and Kumikazu OCHI 中部地方測量部岩田昭雄 Chubu Regional
(3) 筆界基準杭 縮尺区分 1/250 1/500 1/1000 1/2500 1/5000 1km2当たり点数 366~548 点 137~274 点 91~137 14~22 4~5 備考 ( 削除 ) (2) 地籍図根多角本点 航測図根本点又は筆界基準杭 縮尺区分 1/250 1/500 1
 筆界基準杭 縮尺区分 1/250 1/500 1/1000 1/2500 1/5000 1km2当たり点数 366~548 点 137~274 点 91~137 14~22 4~5 備考 ( 削除 ) (2) 地籍図根多角本点 航測図根本点又は筆界基準杭 縮尺区分 1/250 1/500 1") 地籍調査作業規程準則運用基準 ( 別表 ) 新旧対照表 新 ( 傍線部分は改正部分 ) 旧 別表第 1 点配置密度の標準 ( 1 km2当たり点数 ) 第 11 条 第 21 条 第 22 条 第 26 条 第 27 条及び第 45 条 (1) 地籍図根三角点 見通し区分 新点間距離 同一路線の節点間の距離 1 km2当たりの標準点数 水田 畑 集落及び集落周辺等 700m 150m 以上 3 点
地籍調査作業規程準則運用基準 ( 別表 ) 新旧対照表 新 ( 傍線部分は改正部分 ) 旧 別表第 1 点配置密度の標準 ( 1 km2当たり点数 ) 第 11 条 第 21 条 第 22 条 第 26 条 第 27 条及び第 45 条 (1) 地籍図根三角点 見通し区分 新点間距離 同一路線の節点間の距離 1 km2当たりの標準点数 水田 畑 集落及び集落周辺等 700m 150m 以上 3 点
受信機時計誤差項の が残ったままであるが これをも消去するのが 重位相差である. 重位相差ある時刻に 衛星 から送られてくる搬送波位相データを 台の受信機 でそれぞれ測定する このとき各受信機で測定された衛星 からの搬送波位相データを Φ Φ とし 同様に衛星 からの搬送波位相データを Φ Φ とす
 RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
GNSS Conductor GF ユーザーガイド (Document No. SE )
") GNSS Conductor GF ユーザーガイド (Document No. ) www.furuno.com IMPORTANT NOTICE 本書に記載された内容を発行元 ( 古野電気株式会社 ) の書面による許可なく複写 複製 転載および第三者へ開示することを禁止します FURUNO ELECTRIC CO., LTD. All rights reserved. 記載の製品 仕様は予告なく変更することがあります
GNSS Conductor GF ユーザーガイド (Document No. ) www.furuno.com IMPORTANT NOTICE 本書に記載された内容を発行元 ( 古野電気株式会社 ) の書面による許可なく複写 複製 転載および第三者へ開示することを禁止します FURUNO ELECTRIC CO., LTD. All rights reserved. 記載の製品 仕様は予告なく変更することがあります
2.6. GPS の L2P(Y)と L2C 信 号 間 の 擬 似 距 離 バイアスの 観 測 条 件 による 変 化 GPS の L2P(Y) 信 号 と L2C 信 号 間 で 発 生 する 擬 似 距 離 バイアスが メーカや 機 種 温 度 変 化 アンテナ 機 種 受 信 機 ファームウ
と L2C 信 号 間 の 擬 似 距 離 バイアスの 観 測 条 件 による 変 化 GPS の L2P(Y) 信 号 と L2C 信 号 間 で 発 生 する 擬 似 距 離 バイアスが メーカや 機 種 温 度 変 化 アンテナ 機 種 受 信 機 ファームウ") 2.5. GPS の L2P(Y)と L2C 信 号 間 の 擬 似 距 離 バイアスの 補 正 値 を 推 定 する 方 法 GPS の L2P(Y) 信 号 と L2C 信 号 間 で 発 生 する 擬 似 距 離 バイアス( 以 下 L2P-L2C バ イアス)の 補 正 値 を 推 定 する 方 法 について 調 査 した L2P-L2C バイアスは 主 に 受 信 機 内 の 各 信 号
2.5. GPS の L2P(Y)と L2C 信 号 間 の 擬 似 距 離 バイアスの 補 正 値 を 推 定 する 方 法 GPS の L2P(Y) 信 号 と L2C 信 号 間 で 発 生 する 擬 似 距 離 バイアス( 以 下 L2P-L2C バ イアス)の 補 正 値 を 推 定 する 方 法 について 調 査 した L2P-L2C バイアスは 主 に 受 信 機 内 の 各 信 号
503_単路線簡易計算
 手簿記簿作成 + 単路線簡易計算 電子野帳生データを取り込み 手簿データ 記簿データを作成し 点検路線計算を行い 単路線水平計算 単路線高低計算を行う流れを解説します 本書では 次ページのような 級データを例に解説します 解説内容がオプションプログラムの説明である場合が あります ご了承ください このサンプル図は 実際の出力結果と若干異なる場合があります 目次 単路線簡易計算. 入力例の説明. 現場の作成
手簿記簿作成 + 単路線簡易計算 電子野帳生データを取り込み 手簿データ 記簿データを作成し 点検路線計算を行い 単路線水平計算 単路線高低計算を行う流れを解説します 本書では 次ページのような 級データを例に解説します 解説内容がオプションプログラムの説明である場合が あります ご了承ください このサンプル図は 実際の出力結果と若干異なる場合があります 目次 単路線簡易計算. 入力例の説明. 現場の作成
Taro10-測地成果2000マニュアル.PDF
 国土地理院技術資料 A 1-244 測地成果 2000 導入に伴う公共測量成果座標変換マニュアル 平成 13 年 3 月国土交通省国土地理院 International Terrestrial Reference Frame Geodetic Reference System 1980 1980-1- GRS80 Very Long Base- line Interferometry Global
国土地理院技術資料 A 1-244 測地成果 2000 導入に伴う公共測量成果座標変換マニュアル 平成 13 年 3 月国土交通省国土地理院 International Terrestrial Reference Frame Geodetic Reference System 1980 1980-1- GRS80 Very Long Base- line Interferometry Global
R8sGNSS-Trimble SKY Controller
 Trimble Trimble 業務に合わせて 柔軟に拡張が行える新しい仕組みのGNSS受信機 K100 1 台の受信機で 今必要な構成と 将来的な拡張性を両立 PMS652 01 測位の多様性に対応した新システム PMS123 新しい発想のスケラブル TrimbleGNSS 受信機 Trimble R8s は Trimble の高い技術力はそのままに 用途と精度の多様化に対応可能な完全なスケラビリティ受信機です
Trimble Trimble 業務に合わせて 柔軟に拡張が行える新しい仕組みのGNSS受信機 K100 1 台の受信機で 今必要な構成と 将来的な拡張性を両立 PMS652 01 測位の多様性に対応した新システム PMS123 新しい発想のスケラブル TrimbleGNSS 受信機 Trimble R8s は Trimble の高い技術力はそのままに 用途と精度の多様化に対応可能な完全なスケラビリティ受信機です
Microsoft PowerPoint - 00_GIKEN_MMSユーザー会用.pptx
 1.MMS-K320 による 17 条申請に関する精度検証について 2.IP-S2 Lite について ( 紹介 ) 1 1.MMS-K320 による 17 条申請に関する精度検証について 平成 25 年 7 月 MMS-K320 導入 2 1 自社作業マニュアルの作成 作業全体フロー マニュアルに加え 計測経験からのノウハウを加味した計測手順書を用いて高精度なデータ取得を目指しています 初期化作業場所開始時刻方位角検定初期化走行
1.MMS-K320 による 17 条申請に関する精度検証について 2.IP-S2 Lite について ( 紹介 ) 1 1.MMS-K320 による 17 条申請に関する精度検証について 平成 25 年 7 月 MMS-K320 導入 2 1 自社作業マニュアルの作成 作業全体フロー マニュアルに加え 計測経験からのノウハウを加味した計測手順書を用いて高精度なデータ取得を目指しています 初期化作業場所開始時刻方位角検定初期化走行
Time Server Pro. TS-2910 リリースノート お客様各位 2019/09/13 セイコーソリューションズ株式会社 Time Server Pro.(TS-2910/TS-2912) システムソフトウェアリリースノート Ver2.1.1 V2.2 変更点 Version 2.2 (
 システムソフトウェアリリースノート Ver2.1.1 V2.2 変更点 Version 2.2 (") お客様各位 019/09/13 セイコーソリューションズ株式会社 Time Server Pro.(TS-910/TS-91) システムソフトウェアリリースノート Ver.1.1 V. 変更点 Version. (019/09/13) 1 PTP 機能の ITU-T G.875. プロファイルをサポートしました これに伴い 関連する CLI コマンドを追加 変更しました show ptp コマンドで表示される
お客様各位 019/09/13 セイコーソリューションズ株式会社 Time Server Pro.(TS-910/TS-91) システムソフトウェアリリースノート Ver.1.1 V. 変更点 Version. (019/09/13) 1 PTP 機能の ITU-T G.875. プロファイルをサポートしました これに伴い 関連する CLI コマンドを追加 変更しました show ptp コマンドで表示される
測量士補 重要事項 レベルによる観測作業の注意事項
 < 試験合格へのポイント > レベルによる観測作業の注意事項 レベルによる観測作業の注意事項に関する問題は 基本的を押さえておけば必ず解ける問題である 多少なりとも実務に携わっている方であれば 容易に解ける問題ではあるが 実務に携わらない方も この程度の事は測量の基本として覚えておくべきであろう また 観測作業の注意事項は レベルの誤差と消去法 と組み合わせて出題されるため 合わせて覚えると良い (
< 試験合格へのポイント > レベルによる観測作業の注意事項 レベルによる観測作業の注意事項に関する問題は 基本的を押さえておけば必ず解ける問題である 多少なりとも実務に携わっている方であれば 容易に解ける問題ではあるが 実務に携わらない方も この程度の事は測量の基本として覚えておくべきであろう また 観測作業の注意事項は レベルの誤差と消去法 と組み合わせて出題されるため 合わせて覚えると良い (
GSILIB の開発 125 GSILIB の開発 Development of Multi-GNSS Analysis Software GSILIB 測地観測センター古屋智秋 酒井和紀 1 万所求 辻宏道 Geodetic Observation Center Tomoaki FURUYA, K
 15 Development of Multi-GNSS Analysis Software GSILIB 測地観測センター古屋智秋 酒井和紀 1 万所求 辻宏道 Geodetic Observation Center Tomoaki FURUYA, Kazuki SAKAI, Motomu MANDOKORO and Hiromichi TSUJI 地理地殻活動研究センター畑中雄樹 宗包浩志 川元智司
15 Development of Multi-GNSS Analysis Software GSILIB 測地観測センター古屋智秋 酒井和紀 1 万所求 辻宏道 Geodetic Observation Center Tomoaki FURUYA, Kazuki SAKAI, Motomu MANDOKORO and Hiromichi TSUJI 地理地殻活動研究センター畑中雄樹 宗包浩志 川元智司
平成9年度水道事業年報 1概況 2施設
 () (mm) 12 3 31 12 3 31 4 5 6 7 8 9 10 11 12 1 2 3 145,085 146,117 146,352 146,409 146,605 146,685 146,807 147,014 147,002 147,277
() (mm) 12 3 31 12 3 31 4 5 6 7 8 9 10 11 12 1 2 3 145,085 146,117 146,352 146,409 146,605 146,685 146,807 147,014 147,002 147,277
測量士補 重要事項 基準点測量 基準点の選点
 基準点の選点 < 試験合格へのポイント > 基準点 ( 新点 ) の選点に関する問題である 過去の出題回数はそれほど多くはないが その一部は枝問として 作業工程や基準点測量の運用にも出題される 基準点の選点に関する問題は ポイントさえ押さえてしまえば 決して難しい問題ではない 選択肢のパターンも似ているため 過去問題をこなしておけば解答は容易である あえて注意するならば トランシットや TS を用いる観測の場合と
基準点の選点 < 試験合格へのポイント > 基準点 ( 新点 ) の選点に関する問題である 過去の出題回数はそれほど多くはないが その一部は枝問として 作業工程や基準点測量の運用にも出題される 基準点の選点に関する問題は ポイントさえ押さえてしまえば 決して難しい問題ではない 選択肢のパターンも似ているため 過去問題をこなしておけば解答は容易である あえて注意するならば トランシットや TS を用いる観測の場合と
タイトル
 ! この資料は測地学研究室 HP に掲載します http://goo.gl/ly5m4o 観測地球物理学 A 2015 年 9 月 6-7 日 測地学 ~GPS 測量とデータ解析 ~ 京都大学理学研究科 地球惑星科学専攻地球物理学教室 准教授 助教 宮崎真一 風間卓仁 今日の内容 1 導入 : GPSとは? 実習 : GPS 測量 ( 固定点 & 移動点 ) 見学 : 国土地理院連続 GNSS 観測点
! この資料は測地学研究室 HP に掲載します http://goo.gl/ly5m4o 観測地球物理学 A 2015 年 9 月 6-7 日 測地学 ~GPS 測量とデータ解析 ~ 京都大学理学研究科 地球惑星科学専攻地球物理学教室 准教授 助教 宮崎真一 風間卓仁 今日の内容 1 導入 : GPSとは? 実習 : GPS 測量 ( 固定点 & 移動点 ) 見学 : 国土地理院連続 GNSS 観測点
GPS 海洋ブイの概要 GPS 衛星 GPS 衛星 陸上局 ( 基準点 ) 基準点の測位 RTK-GPS 補正データ 観測データ 観測点の測位 GPS 海洋観測ブイ 20km RTK (Real Time Kinematic) 測位 数 cm オーダの測位精度 観測センター GPS 測位により 海面
 基準点の測位 RTK-GPS 補正データ 観測データ 観測点の測位 GPS 海洋観測ブイ 20km RTK (Real Time Kinematic) 測位 数 cm オーダの測位精度 観測センター GPS 測位により 海面") 第 10 回津波予測技術に関する勉強会資料 3 GPS 海洋ブイの概要 平成 25 年 7 月 2 日 日立造船株式会社 GPS 海洋ブイの概要 GPS 衛星 GPS 衛星 陸上局 ( 基準点 ) 基準点の測位 RTK-GPS 補正データ 観測データ 観測点の測位 GPS 海洋観測ブイ 20km RTK (Real Time Kinematic) 測位 数 cm オーダの測位精度 観測センター GPS
第 10 回津波予測技術に関する勉強会資料 3 GPS 海洋ブイの概要 平成 25 年 7 月 2 日 日立造船株式会社 GPS 海洋ブイの概要 GPS 衛星 GPS 衛星 陸上局 ( 基準点 ) 基準点の測位 RTK-GPS 補正データ 観測データ 観測点の測位 GPS 海洋観測ブイ 20km RTK (Real Time Kinematic) 測位 数 cm オーダの測位精度 観測センター GPS
<4D F736F F F696E74202D E93788CA48B8694AD955C89EF5F4E6F30325F D AC48E8B8CA48B865F53438FBC
 [2] ADS-B 方式高度維持性能監視の 評価結果 監視通信領域 松永圭左, 宮崎裕己 平成 29 年 6 月 8 日第 17 回電子航法研究所研究発表会 - 発表内容 - 1. 背景 2. 高度監視システム (HMS) の概要 2.1 高度誤差の内容, 算出処理 2.2 ADS-B 方式 HMS(AHMS) の測定誤差要因 3. AHMS 試験システム 3.1 試験システム概要 3.2. データ評価結果
[2] ADS-B 方式高度維持性能監視の 評価結果 監視通信領域 松永圭左, 宮崎裕己 平成 29 年 6 月 8 日第 17 回電子航法研究所研究発表会 - 発表内容 - 1. 背景 2. 高度監視システム (HMS) の概要 2.1 高度誤差の内容, 算出処理 2.2 ADS-B 方式 HMS(AHMS) の測定誤差要因 3. AHMS 試験システム 3.1 試験システム概要 3.2. データ評価結果
観測設定 送信周波数 送信周波数 送信電力 frequency of H frequency of V H Freq_H Hz float frequency of H Freq_V Hz float frequency of V Pt_H mw float H 1 もしくは MHz 単 位 1 も
 レーダ観測パラメータ名 ( 案 ) H 水平偏波, horizontally polarized wave V 垂直偏波, vertically polarized wave レーダ情報 観測情報 21/12/2 尾上万里子 日本語名 英語名 変数名 単位 データ型 long name 次元 scale factor offset 備考 レーダサイトの緯度 latitude of R_LAT degree
レーダ観測パラメータ名 ( 案 ) H 水平偏波, horizontally polarized wave V 垂直偏波, vertically polarized wave レーダ情報 観測情報 21/12/2 尾上万里子 日本語名 英語名 変数名 単位 データ型 long name 次元 scale factor offset 備考 レーダサイトの緯度 latitude of R_LAT degree
精度を有すると認められた基準点とする ( 基準点の精度 ) 準則第 38 条 第 19 条の 4 4 級基準点は 2 次の地籍図根多角点と同等なものとして取り扱う 国土調査法第 19 条第 2 項の規定により認証され 又は同条第 5 項の規定により指定さ れた基準点のうち 4 級基準点に相当するもの
 準則第 38 条 第 19 条の 4 4 級基準点は 2 次の地籍図根多角点と同等なものとして取り扱う 国土調査法第 19 条第 2 項の規定により認証され 又は同条第 5 項の規定により指定さ れた基準点のうち 4 級基準点に相当するもの") 地籍調査作業規程準則運用基準 ( 新旧対照表 ) 新 ( 傍線部分は改正部分 ) 旧 第 1 章総則 ( 略 ) 第 1 章総則 ( 略 ) 第 2 章計画 ( 略 ) 第 2 章計画 ( 略 ) 第 3 章一筆地調査第 1 節準備作業第 2 節現地調査 ( 略 ) 第 3 章一筆地調査第 1 節準備作業第 2 節現地調査 ( 略 ) 第 4 章地籍測量第 1 節総則 第 4 章地籍測量第 1 節総則
地籍調査作業規程準則運用基準 ( 新旧対照表 ) 新 ( 傍線部分は改正部分 ) 旧 第 1 章総則 ( 略 ) 第 1 章総則 ( 略 ) 第 2 章計画 ( 略 ) 第 2 章計画 ( 略 ) 第 3 章一筆地調査第 1 節準備作業第 2 節現地調査 ( 略 ) 第 3 章一筆地調査第 1 節準備作業第 2 節現地調査 ( 略 ) 第 4 章地籍測量第 1 節総則 第 4 章地籍測量第 1 節総則
目次 1. はじめに 拡張 DMエディタについて 作業規定の準則との対応 GeoCoach3D(DM 三次元エディタ ) との違い ファイル入出力 DMとの変換 不整三角網... 5
 との違い ファイル入出力 DMとの変換 不整三角網... 5") 拡張 DM エディタ説明書 2008/10/15 有限会社ジオ コーチ システムズ http://www.geocoach.co.jp/ [email protected] 拡張 DM エディタは 作業規定の準則 の 公共測量標準図式数値地形図データファイル仕様 に記述されているフ ォーマットのファイルを処理するアプリケーションです 拡張子.dm のファイルを開き 3 次元表示 検査 修正 保存などができます
拡張 DM エディタ説明書 2008/10/15 有限会社ジオ コーチ システムズ http://www.geocoach.co.jp/ [email protected] 拡張 DM エディタは 作業規定の準則 の 公共測量標準図式数値地形図データファイル仕様 に記述されているフ ォーマットのファイルを処理するアプリケーションです 拡張子.dm のファイルを開き 3 次元表示 検査 修正 保存などができます
efit+ for TCU 測量計算
 efit + for TCU 測量計算 (M06201) はじめに この度は 弊社製品を御買い上げ頂き 誠にありがとうございます 本使用説明書は efit + for TCU の使用者のために書かれたものです ご使用の前に 本書をお読みの上で 正しくお取り扱いください また 本書はお読みになった後も 必要なときにすぐ見られるよう 大切に保管しておいてください Microsoft Windows WindowsCE
efit + for TCU 測量計算 (M06201) はじめに この度は 弊社製品を御買い上げ頂き 誠にありがとうございます 本使用説明書は efit + for TCU の使用者のために書かれたものです ご使用の前に 本書をお読みの上で 正しくお取り扱いください また 本書はお読みになった後も 必要なときにすぐ見られるよう 大切に保管しておいてください Microsoft Windows WindowsCE
第2章 位置の計算
 1 第 章位置の計算 測量において地球上の水平位置は経度と緯度 平面座標 又は極座標の距離と方向角 ( 球面距離と方位角 ) で表 される 以下では 経緯度と平面座標の関係等について計算方法について例題 ( プログラム ) を用いて示すことにしよう 以下の計算での数値は Bessel 楕円体から GRS80 楕円体に変更してあるので注意のこと.1 経緯度および方位角図.1.1 に示すように与点 Aの緯度と経度
1 第 章位置の計算 測量において地球上の水平位置は経度と緯度 平面座標 又は極座標の距離と方向角 ( 球面距離と方位角 ) で表 される 以下では 経緯度と平面座標の関係等について計算方法について例題 ( プログラム ) を用いて示すことにしよう 以下の計算での数値は Bessel 楕円体から GRS80 楕円体に変更してあるので注意のこと.1 経緯度および方位角図.1.1 に示すように与点 Aの緯度と経度
PowerPoint プレゼンテーション
 8GNSS 25 GNSS 25 1114 25 2 23 24 TCAR 3ILS L5 L1+L5 ISB GLONASS IFB GPS,GLONASS,QZSS + GPS-QZSS L2P-L2C, L2C 1/4cycle shift PPP GPS+GLONASS GPSGLONASS AR 23,24 25 25 GPSQZSS GLONASS Galileo BeiDou ISB
8GNSS 25 GNSS 25 1114 25 2 23 24 TCAR 3ILS L5 L1+L5 ISB GLONASS IFB GPS,GLONASS,QZSS + GPS-QZSS L2P-L2C, L2C 1/4cycle shift PPP GPS+GLONASS GPSGLONASS AR 23,24 25 25 GPSQZSS GLONASS Galileo BeiDou ISB

Trimble Agriculture 精密農業ソリューションカタログ
 Trimble Agriculture TRANSFORMING THE WAY THE WORLD WORKS GPS CFX-750 EZ-Guide 250 CFX-750 EZ-Guide 250 LCD 8 4.3 2 GPS 1 1 OnPath DGPS MSAS DGPS MSAS 15 20cm *1 OmniSTAR VBS 15 20cm *2 OmniSTAR XP/HP 7.5
Trimble Agriculture TRANSFORMING THE WAY THE WORLD WORKS GPS CFX-750 EZ-Guide 250 CFX-750 EZ-Guide 250 LCD 8 4.3 2 GPS 1 1 OnPath DGPS MSAS DGPS MSAS 15 20cm *1 OmniSTAR VBS 15 20cm *2 OmniSTAR XP/HP 7.5
測量試補 重要事項
 重量平均による標高の最確値 < 試験合格へのポイント > 標高の最確値を重量平均によって求める問題である 士補試験では 定番 問題であり 水準測量の計算問題としては この形式か 往復観測の較差と許容範囲 の どちらか または両方がほぼ毎年出題されている 定番の計算問題であるがその難易度は低く 基本的な解き方をマスターしてしまえば 容易に解くことができる ( : 最重要事項 : 重要事項 : 知っておくと良い
重量平均による標高の最確値 < 試験合格へのポイント > 標高の最確値を重量平均によって求める問題である 士補試験では 定番 問題であり 水準測量の計算問題としては この形式か 往復観測の較差と許容範囲 の どちらか または両方がほぼ毎年出題されている 定番の計算問題であるがその難易度は低く 基本的な解き方をマスターしてしまえば 容易に解くことができる ( : 最重要事項 : 重要事項 : 知っておくと良い
測量士補試験 重要事項 基準点測量「偏心補正計算」
 測量士補試験重要事項基準点測量 偏心補正計算 (Vr.0) 偏心補正計算 < 試験合格へのポイント > 偏心補正計算は 偏心補正計算の出題はその計算方法から 正弦定理を用いるものと余弦定理を用いるものに大別されるが 出題は正弦定理を用いる問題が主である 正弦定理を用いる問題は 与えられた数値を単に公式に当てはめればよいため 比較的簡単に解答することができる また ほぼ 100% の確率で問題文に図が示してあるため
測量士補試験重要事項基準点測量 偏心補正計算 (Vr.0) 偏心補正計算 < 試験合格へのポイント > 偏心補正計算は 偏心補正計算の出題はその計算方法から 正弦定理を用いるものと余弦定理を用いるものに大別されるが 出題は正弦定理を用いる問題が主である 正弦定理を用いる問題は 与えられた数値を単に公式に当てはめればよいため 比較的簡単に解答することができる また ほぼ 100% の確率で問題文に図が示してあるため
Visio-GGStarシリーズ2014C.vsd
 R itto GNSS Receiver GGStar GPS/GLONASS L/L2 BeiDou B/B2 P307/ GPS/GLONASS L OEM6/ USP Nu8 シリーズ 小型 軽量 低価格 ANT PWR USB Serial Da ta GPS/GLONASS Re ce iv er PWR P V Ritto plus BeiDou GGStar-P307/&OEM6/ ローコスト
R itto GNSS Receiver GGStar GPS/GLONASS L/L2 BeiDou B/B2 P307/ GPS/GLONASS L OEM6/ USP Nu8 シリーズ 小型 軽量 低価格 ANT PWR USB Serial Da ta GPS/GLONASS Re ce iv er PWR P V Ritto plus BeiDou GGStar-P307/&OEM6/ ローコスト
vecrot
 1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
Microsoft Word - NS-CTL3000マニュアル_Ver1.05_.doc
 P.1 NetSurv3000 用 GPS コントローラ (NS-CTL3000 for Pocket PC) 操作マニュアル 2006/7/28 Ver1.05 公共測量への PCV 補正 (GPS スタティック測量 ) 対応版 P.2 はじめに NetSurv3000 用 GPS コントローラ (NS-CTL/3000 for Pocket PC) は サーバ型 RTK-GPS 専用二周波 GPS
P.1 NetSurv3000 用 GPS コントローラ (NS-CTL3000 for Pocket PC) 操作マニュアル 2006/7/28 Ver1.05 公共測量への PCV 補正 (GPS スタティック測量 ) 対応版 P.2 はじめに NetSurv3000 用 GPS コントローラ (NS-CTL/3000 for Pocket PC) は サーバ型 RTK-GPS 専用二周波 GPS
図 -2 測位方式の概念図 RTK-GPS: Real Time Kinematic GPS 2 図 D-GPS RTK-GPS cm 1ms GPS CDMA 巻 8 号情報処理 2002 年 8 月 - 2 -
 1 RTK-GPS 柳原 徳久 (株)日立製作所 [email protected] 初本慎太郎 (株)日立産機システム [email protected] 日本ではカーナビゲーションが広く普及しており 新車への装着率は約 30 に達している カーナビの位置検 出には GPS Global Positioning System が用いられていることはよく知られている
1 RTK-GPS 柳原 徳久 (株)日立製作所 [email protected] 初本慎太郎 (株)日立産機システム [email protected] 日本ではカーナビゲーションが広く普及しており 新車への装着率は約 30 に達している カーナビの位置検 出には GPS Global Positioning System が用いられていることはよく知られている