高精度全方位移動ロボットの実運用のための 障害物の画像認識技術およびリアルタイム経路探索技術の開発 東京ロボティクス株式会社岡弘之 高木崇光 松尾雄希 坂本義弘 本研究は 人工知能研究振興財団の助成によって実施されたものです 1
|
|
|
- さあしゃ かたいわ
- 5 years ago
- Views:
Transcription
1 高精度全方位移動ロボットの実運用のための 障害物の画像認識技術およびリアルタイム経路探索技術の開発 東京ロボティクス株式会社岡弘之 高木崇光 松尾雄希 坂本義弘 本研究は 人工知能研究振興財団の助成によって実施されたものです 1




2 弊社の紹介 所在地 東京都新宿区西早稲田 事業内容 主にロボットアームを開発 製造 販売 国際ロボット展 (irex2017) に出展 Deep Learning を用いた 野菜のピッキングデモ を実演 2

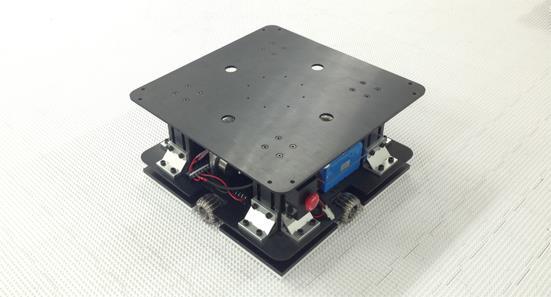

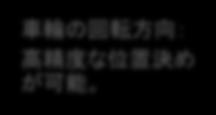


3 高精度全方位移動ロボット Precise Omni 移動台車 構造 歯車の噛み合いと車輪のエンコーダにより 精密な位置決めを実現 床は特殊パネル 特徴 目標位置に 1mm の精度で到達可能 直線移動だけでなく曲線移動も可能 ただし 床面への特殊パネルの設置が必要 車輪と床の噛み合い に特徴を有する 車輪の回転方向 : 高精度な位置決めが可能 三角錐の突起を格子状に配置した歯車状特殊パネル 車輪の垂直方向 : 横滑りが可能 [ 動画 ] 3
")


4 Precise Omni の実運用に向けた課題 課題 1 特殊パネルの上に小さな障害物 ( ボルトやナット等 ) が落下すると 移動台車の車輪に引っかかってしまう なお 3mm 以上の大きな障害物であれば バンパーとの接触により検知できる 移動台車 バンパー 大きい障害物 バンパーにより接触を検知できるため引っ掛かりを回避可能 小さい障害物 バンパーでは接触を検知できない 4
5 課題 2 複数の移動台車の移動経路を探索する リアルタイムマルチエージェント経路探索技術が必要 経路探索だけでも一般に計算量が大きいが マルチエージェントかつ互いの衝突も回避するとなると 計算量が膨大となる 部屋 棚 棚 棚 移動台車 障害物 目標位置 棚 5
6 本研究の目的 障害物の画像認識技術を開発すること 要求スペック : 全方位の検出が可能であること 移動台車の安全停止距離 (1.0m) を確保できること 安価であること (Web カメラを採用 ) 検出した障害物の位置を特定できること リアルタイムマルチエージェント経路探索技術を開発すること 要求スペック 一度に複数の移動台車の経路探索が可能であること 障害物や移動台車同士の衝突を回避可能であること 6
7 1. 障害物の画像認識技術の開発 7
")
8 障害物の検出手法の概要 障害物の特徴量を用いた検出は難しい 現場では ネジやナットだけでなく ガラス破片や金属片などあらゆる物が障害物となり 限定できない 小さい障害物の場合 Web カメラに写るサイズが小さく十分な特徴量を取得できない 移動台車の前面に取り付けた Web カメラで撮影した画像 障害物 ( ボルト ナット ) 移動台車 パネル 8
9 そこで 特殊パネルの特徴を活かした障害物検出を行うアプローチを採用した タイルパターンを検出し その中の異常なセルを判定する タイルパターンの検出 ( キャリブレーション ) 画像処理 FFT クラスタリング 線形回帰 移動台車 移動台車はタイルパターンに対して常に一定の方向を向く 異常なセルの検出 ( 障害物検出 ) 特徴量判定 ( 統計処理 ) 9

 Web カメラ (Logicool HD Webcam C615)")

10 ハードウェア構成 Web カメラを 4 方向に取り付けることで 全方位の検出を可能にした 移動台車 パネル -10deg 10cm Web カメラ 移動台車 水平視野角 制御 PC (Panasonic CF-SX1: Core i5 2.5GHz, 4GB DDR3 SDRAM) Web カメラ (Logicool HD Webcam C615) Web カメラのスペック Logicool HD Webcam C615 視野角画素数フォーカス露出白補正 水平 74.0 垂直 41.6 広角レンズ (Elecom Selfie Lens (x0.4) カメラの水平視野角は 128deg へ 210 万画素 (1920x1080) 手動 / 自動 (7cm~ ) 手動 / 自動 手動 / 自動 10
11 フローチャート キャリブレーション処理 (1 度だけ ) 障害物検出処理 ( 一定周期で繰り返し ) Start Start 1 不要な領域の除去 6 異常セルの検出 2 画像処理 7 距離の算出 3 奥行縞の検出 End 4 水平縞の検出 5 タイルパターンの再構築 End 11
12 1 不要な領域の除去 タイルでない画像領域を除去する 各ブロックの特徴量 (= 内部の HSV 値の平均 ) を算出 リファレンス領域はタイルであるとする 各ブロックの特徴量がリファレンスから許容範囲内に収まっているかを判定 ブロック毎に HSV 色空間を算出 変換 リファレンス領域 RGB 色空間 ( 画像信号 ) HSV 色空間 ( 知覚的信号 ) リファレンスから外れた特徴量を持つブロックを除去 12
13 2 画像処理 画像処理を用いて タイルパターンを強調させる ヒストグラム均等化処理 環境光の違いの影響を受けないよう 明るさを正規化 画像内で明るさの分布に偏りがある場合は さらに局所的ダイナミックレンジ圧縮処理を用いて補正する ガウシアンフィルター (σ=10) によるぼかし処理 後工程の 3 奥行縞の同定 を可能にするため ガウシアンフィルター (σ=4) によるぼかし処理 後工程の 4 水平縞の同定 を可能にするため ヒストグラム均等化処理 ガウシアンフィルター (σ=10) ガウシアンフィルター (σ=4) 13
")
14 ガウシアンフィルター (σ=10) ガウシアンフィルター (σ=4) 14
15 3 奥行縞の同定 画像の水平断面 ( 左図の黄線 ) の波形をFFTにかけて低周波成分のみ残す ( 左図のグラフ ) 次に 波の低い位置をプロットする ( 右図の青点 ) 最後に 近い青点をクラスタリングし その点群から回帰直線 ( 右図の緑線 ) を求める その際 回帰直線群が等間隔のタイルパターンになるように傾き 切片を調整する 輝度値 y 座標 [pix] x 座標 [pix] 交点 : 遠方 複数の水平断面を取得 x 座標 [pix] 15
 次に 波の低い位置から")
 上記回帰直線の2つの端点と 3で取得した 遠方の点とを結ぶ 2")
![次曲線を同定する ( 右図の赤線 ) 間隔 [pix] 間隔 [pix] y 座標](/docs-images/96/129266612/images/16-3.jpg "[pix] 次の点までの距離 検出した水平直線のプロットの両端 奥行き直線の交点 ( 遠方")
16 4 水平縞の検出 3で取得した奥行縞 ( 左図の黄線 ) の波形をFFTにかけて低周波成分のみ残す ( 左図のグラフ ) 次に 波の低い位置から 水平縞間隔の距離を取得し プロットする ( 右図の青点 ) その点群の回帰直線を求める ( 右図の緑線 ) 上記回帰直線の2つの端点と 3で取得した 遠方の点とを結ぶ 2 次曲線を同定する ( 右図の赤線 ) 間隔 [pix] 間隔 [pix] y 座標 [pix] 次の点までの距離 検出した水平直線のプロットの両端 奥行き直線の交点 ( 遠方 ) チェックする断面 y 座標 [pix] 16
17 5 タイルパターンの再構築 奥行縞の再構築 3で求めた回帰直線の傾き 切片の値から 奥行縞の直線を求める 水平縞の再構築 4のグラフから 手前の水平線から奥に向かって水平線のy 座標を逐次求める グリッドセルの生成 奥行縞と水平縞の式から タイルパターンによるグリッドセル全ての4 点頂点の座標を算出して記憶する 再構築したタイルパターン ( 緑線 ) グリッドセル 17

18 6 異常セルの検出 5で得たグリッドセルの各セルについて 特徴量を算出する 特徴量 : グリッド内の画素のHSV( 色相 彩度 輝度 ) の平均値次に 特徴量のマップに対してフィルタをかけることで 特徴量が大きく変化する箇所を検出する 変化量の外れ値は 正規分布と仮定して3σで抽出 特徴量マップ タイル領域内の各グリッドについて 平均 HSV を求める 変換 RGB 色空間 HSV 色空間 障害物の検出結果 フィルタ処理
19 7 障害物までの距離の算出 画像の座標と実空間距離を換算する方法 焦点スクリーン θ( 垂直画角 )=41.6[deg] カメラ 2lcos(θ/2) 画面の下端 2lcos(θ/2)cos(θ/2) θ/2 l ( 既知 ) 画面の中央 画面の中央 画面の下端 この間の水平線の数を 4 水平縞のグラフから算出 タイルパターンの実寸は既知であるから l が求まる 19
20 評価結果 (1) 検出範囲 移動台車から 1.31m まで離れた障害物を検出可能であることが確認できた 移動台車は 1.0m あれば安全停止できるため 十分 (2) 検出精度 20 種類の障害物を用いてテストを行った 黒いボルトや銀色のナットなど パネル床面と異なる色の物体については 100% の精度で検出することができた 一方 パネル床面と同じ白い障害物については検出することができなかった そのため 色の影響を受けにくい近赤外線センサーなどを補完的に使用することを考える必要がある パネルの取り付け溝を障害物と誤検出してしまう 溝の位置やその特徴量を予めマップで記憶しておくなど 対応が必要 (3) 処理時間 グリッドパターン生成の所要時間は2.5 秒障害物検出時間は0.05 秒カメラの撮影周期は0.2 秒リアルタイム性を十分に確保できている 20
21 2. リアルタイムマルチエージェント経路探索技術の開発 21
22 手法 マルチエージェント経路探索アルゴリズムとして A* algorithm を採用 ただし 元のアルゴリズムのままでは計算量が多いため 様々な高速化手法が提案されている 今回は GPU ベースの下記の並列計算手法 ( 1) を参考に経路探索の実装を行った ( 1) GPU Accelerated Multi-agent Path Planning based on Grid Space Decomposition, Giuseppe Caggianese, Ugo Erra 実運用に近い状況での動作検証 移動台車を多数用意することは困難であったため 今回はシミュレーションで評価を行った 22
 立体図シミュレーションデータ 縦横 20mの空間の倉庫 作業棚が7つ 移動台車が8 台存在 移動台車のタスク 作業棚に対して作業を行った後に")
 立体図 (b) 平面図 カウンター 移動台車 1 移動台車 2 青い領域は台車の移動可能領域を表す 移動台車 3 移動台車 4 移動台車 5 移動台車 8 移動台車 7 移動台車 6 (b) 平面図")
23 評価 シミュレーション環境 OS:Ubuntu LTS (64bit) メモリ :15.7GB CPU:Intel Core x 8 グラフィック :GeForce GTX 970 (a) 立体図シミュレーションデータ 縦横 20mの空間の倉庫 作業棚が7つ 移動台車が8 台存在 移動台車のタスク 作業棚に対して作業を行った後に 左上のカウンターまで移動する 経路探索の条件 100マス 100マスのグリッドを採用することで 滑らかな経路を生成することを可能とした 図 5 Precise Omni システムのシミュレーションの構築内容 図 5 Precise Omni システムのシミュレーションの構築内容 (a) 立体図 (b) 平面図 カウンター 移動台車 1 移動台車 2 青い領域は台車の移動可能領域を表す 移動台車 3 移動台車 4 移動台車 5 移動台車 8 移動台車 7 移動台車 6 (b) 平面図 移動 [ 動画 ] 23

 すれ違い前 :")
24 評価結果 シミュレーションを実行したところ 目に見える遅延は発生しなかった 移動台車が経路上で互いに衝突を回避する際に 衝突を避けることを優先した経路が選択され すれ違った後は目標地点への最短経路が選択された 図 6 2 つの移動台車がすれ違う前後の進行方向 (a) すれ違い前 : 衝突を回避するための方向を向いている (b) すれ違い後 : 目的地の方向を向いている 24
25 まとめ 25
26 まとめ 障害物検出について 障害物とその位置を検出するための基本技術を確立することができた 特徴量判定部において 機械学習などを用いることでさらに精度を改善することができると考えられる マルチエージェント経路探索について A* algorithm の改良を使用することで 実運用の要求を満たす経路探索 ( 衝突回避 リアルタイム性 ) を実現できることを確認できた 以上より 高精度全方位移動ロボット Precise Omni の実運用化の実現に向けて大きく前進できたと考える 26
27 謝辞 多くの方々にご支援頂きまして 大変感謝いたします 今後ともどうぞ宜しくお願い致します ご清聴ありがとうございました 27
高精度全方位移動ロボットの実運用のための 人工知能研究振興財団第 24 回成果発表会 東京ロボティクス株式会社 坂本義弘 岡弘之 1 弊社の紹介 所在地 東京都新宿区西早稲
 高精度全方位移動ロボットの実運用のための 障害物の画像認識技術およびリアルタイム経路探索技術の開発 @ 人工知能研究振興財団第 24 回成果発表会 2018.09.12 東京ロボティクス株式会社 坂本義弘 岡弘之 1 弊社の紹介 http://robotics.tokyo 所在地 東京都新宿区西早稲田 事業内容 主にロボットアームを開発 製造 販売 国際ロボット展 (irex2017) に出展 Deep
高精度全方位移動ロボットの実運用のための 障害物の画像認識技術およびリアルタイム経路探索技術の開発 @ 人工知能研究振興財団第 24 回成果発表会 2018.09.12 東京ロボティクス株式会社 坂本義弘 岡弘之 1 弊社の紹介 http://robotics.tokyo 所在地 東京都新宿区西早稲田 事業内容 主にロボットアームを開発 製造 販売 国際ロボット展 (irex2017) に出展 Deep
Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]
![Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]](/thumbs/94/118755799.jpg "Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]") 第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
人間の視野と同等の広視野画像を取得・提示する簡易な装置
 人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
画像類似度測定の初歩的な手法の検証
 画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
カメラレディ原稿
 IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,y.tanaka@sensor.mech.chuo-u.ac.jp 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,y.tanaka@sensor.mech.chuo-u.ac.jp 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
デジカメ天文学実習 < ワークシート : 解説編 > ガリレオ衛星の動きと木星の質量 1. 目的 木星のガリレオ衛星をデジカメで撮影し その動きからケプラーの第三法則と万有引 力の法則を使って, 木星本体の質量を求める 2. ガリレオ衛星の撮影 (1) 撮影の方法 4つのガリレオ衛星の内 一番外側を
 撮影の方法 4つのガリレオ衛星の内 一番外側を") デジカメ天文学実習 < ワークシート : 解説編 > ガリレオ衛星の動きと木星の質量 1. 目的 木星のガリレオ衛星をデジカメで撮影し その動きからケプラーの第三法則と万有引 力の法則を使って, 木星本体の質量を求める 2. ガリレオ衛星の撮影 (1) 撮影の方法 4つのガリレオ衛星の内 一番外側を回るカリストまたはその内側のガニメデが 木星から最も離れる最大離角の日に 200~300mm の望遠レンズ
デジカメ天文学実習 < ワークシート : 解説編 > ガリレオ衛星の動きと木星の質量 1. 目的 木星のガリレオ衛星をデジカメで撮影し その動きからケプラーの第三法則と万有引 力の法則を使って, 木星本体の質量を求める 2. ガリレオ衛星の撮影 (1) 撮影の方法 4つのガリレオ衛星の内 一番外側を回るカリストまたはその内側のガニメデが 木星から最も離れる最大離角の日に 200~300mm の望遠レンズ
画像処理工学
 画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
 招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
Microsoft Word - 卒論レジュメ_最終_.doc
 指紋認証のマニューシャ抽出について 澤見研究室 I02I036 兼信雄一 I02I093 柳楽和信 I02I142 吉田寛孝 1. はじめに近年, キャッシュカードや暗証番号が盗用され, 現金が引き出されるような事件が相次いでいる. これらの対向策として人間の体の一部を認証の鍵として利用する生体認証に注目が集まっている. そこで我々は, 生体認証で最も歴史がある指紋認証技術に着目した. 指紋認証方式は,2
指紋認証のマニューシャ抽出について 澤見研究室 I02I036 兼信雄一 I02I093 柳楽和信 I02I142 吉田寛孝 1. はじめに近年, キャッシュカードや暗証番号が盗用され, 現金が引き出されるような事件が相次いでいる. これらの対向策として人間の体の一部を認証の鍵として利用する生体認証に注目が集まっている. そこで我々は, 生体認証で最も歴史がある指紋認証技術に着目した. 指紋認証方式は,2
de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D.
 de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D. Mixed Reality の全体像 Kinect はただのカメラではない 3D 空間の認識 ( 深度 ) 人の全身の動きをとらえる Azure Kinect Development Environment Azure Kinect DK 開発環境
de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D. Mixed Reality の全体像 Kinect はただのカメラではない 3D 空間の認識 ( 深度 ) 人の全身の動きをとらえる Azure Kinect Development Environment Azure Kinect DK 開発環境
Microsoft PowerPoint - document pptx
 2018 年 5 月 11 日 ITDLab 株式会社 実吉敬二 Part 1. LiDARやミリ波レーダー 単眼カメラと比較したステレオカメラの優位性 1. あらゆる距離の物体を検出できる 画面に写っていれば どのような物体でも 距離精度は別にして そこまでの距離がわかる 例えば今使われている車載用のステレオカメラで東京から富士山を撮像したら 1.2 kmより遠くにあるということがわかる これは衝突回避にとって重要な情報である
2018 年 5 月 11 日 ITDLab 株式会社 実吉敬二 Part 1. LiDARやミリ波レーダー 単眼カメラと比較したステレオカメラの優位性 1. あらゆる距離の物体を検出できる 画面に写っていれば どのような物体でも 距離精度は別にして そこまでの距離がわかる 例えば今使われている車載用のステレオカメラで東京から富士山を撮像したら 1.2 kmより遠くにあるということがわかる これは衝突回避にとって重要な情報である
Microsoft Word - NJJ-105の平均波処理について_改_OK.doc
 ハンディサーチ NJJ-105 の平均波処理について 2010 年 4 月 株式会社計測技術サービス 1. はじめに平均波処理の処理アルゴリズムの内容と有効性の度合いを現場測定例から示す まず ほぼ同じ鉄筋かぶりの密接鉄筋 壁厚測定時の平均波処理画像について また ダブル筋 千鳥筋の現場測定例へ平均波処理とその他画像処理を施し 処理画像の差について比較検証し 考察を加えた ( 平均波処理画像はその他の各処理画像同様
ハンディサーチ NJJ-105 の平均波処理について 2010 年 4 月 株式会社計測技術サービス 1. はじめに平均波処理の処理アルゴリズムの内容と有効性の度合いを現場測定例から示す まず ほぼ同じ鉄筋かぶりの密接鉄筋 壁厚測定時の平均波処理画像について また ダブル筋 千鳥筋の現場測定例へ平均波処理とその他画像処理を施し 処理画像の差について比較検証し 考察を加えた ( 平均波処理画像はその他の各処理画像同様
リソース制約下における組込みソフトウェアの性能検証および最適化方法
 リソース制約下における組込みソフト ウェアの性能検証および最適化方法 広島市立大学 大学院情報科学研究科システム工学専攻 中田明夫倉田和哉百々太市 1 提案技術の概要 組込みシステムの開発 厳しいリソース制約 (CPU, ネットワークなど ) 非機能要求 ( リアルタイム性など ) の達成 開発プロセスにおける設計段階 性能問題を発見することが困難 実装段階で性能問題が発覚 設計の手戻りが発生 設計段階での性能検証手法
リソース制約下における組込みソフト ウェアの性能検証および最適化方法 広島市立大学 大学院情報科学研究科システム工学専攻 中田明夫倉田和哉百々太市 1 提案技術の概要 組込みシステムの開発 厳しいリソース制約 (CPU, ネットワークなど ) 非機能要求 ( リアルタイム性など ) の達成 開発プロセスにおける設計段階 性能問題を発見することが困難 実装段階で性能問題が発覚 設計の手戻りが発生 設計段階での性能検証手法
スライド 1
 超解像技術とは? 動画や静止画連写などで得られる複数の低解像度 (= 小さな ) 画像を組み合わせ 演算により高解像度の (= 大きな ) 画像を作り出す技術の事を一般に 超解像 技術と呼びます 超解像処理 高解像処理 (1 枚超解像 ) 超解像 のように複数の画像を用いるのではなく 1 枚の画像が持つ情報を深く解析する事で 高解像度の画像を得る最新技術です では 最新の画像処理技術により この高解像処理を実現しました
超解像技術とは? 動画や静止画連写などで得られる複数の低解像度 (= 小さな ) 画像を組み合わせ 演算により高解像度の (= 大きな ) 画像を作り出す技術の事を一般に 超解像 技術と呼びます 超解像処理 高解像処理 (1 枚超解像 ) 超解像 のように複数の画像を用いるのではなく 1 枚の画像が持つ情報を深く解析する事で 高解像度の画像を得る最新技術です では 最新の画像処理技術により この高解像処理を実現しました
Microsoft Word - NumericalComputation.docx
 数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
000
 1 1 4 2 3 5 1 段階前の状態に戻します 元に戻した操作をやりなおします レイヤ全体 または領域の中の画像をコピーします コピーした画像を貼り付けます レイヤ全体 または領域の中の画像を切り取ります レイヤ全体 または領域の中の画像を削除します 現在作成中の画像をコピーして保存します バックアップを作成する時などに使用します 現在作成中の画像に別の画像ファイルから画像を貼り付けます 部品庫の素材フォルダーを表示します
1 1 4 2 3 5 1 段階前の状態に戻します 元に戻した操作をやりなおします レイヤ全体 または領域の中の画像をコピーします コピーした画像を貼り付けます レイヤ全体 または領域の中の画像を切り取ります レイヤ全体 または領域の中の画像を削除します 現在作成中の画像をコピーして保存します バックアップを作成する時などに使用します 現在作成中の画像に別の画像ファイルから画像を貼り付けます 部品庫の素材フォルダーを表示します
実験題吊 「加速度センサーを作ってみよう《
 加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります

Microsoft Word - AutocadCivil3D.doc
 AutocadCivil3D 簡易ガイド 新規図面作成から縦断抽出までの流れ編 -1- 1 新規図面を用意する (1) ホームボタンから 新規 - 図面 をクリックします (2) ファイルの種類から 図面テンプレート (.dwt) を選択し テンプレートファイル 国土交通省 仕様 20m 測点.dwt を選択します Note. このテンプレートを使用しないと 線形抽出時の測点条件など標準としたい条件にセットされま
AutocadCivil3D 簡易ガイド 新規図面作成から縦断抽出までの流れ編 -1- 1 新規図面を用意する (1) ホームボタンから 新規 - 図面 をクリックします (2) ファイルの種類から 図面テンプレート (.dwt) を選択し テンプレートファイル 国土交通省 仕様 20m 測点.dwt を選択します Note. このテンプレートを使用しないと 線形抽出時の測点条件など標準としたい条件にセットされま
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
MATLAB EXPO 2019 Japan プレゼン資料の検討
 自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4
 は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4") 関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4WDS ローバー Ver.2.0 をリリースします 旧製品である 4WDS ローバー で好評な機能はそのままに
関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4WDS ローバー Ver.2.0 をリリースします 旧製品である 4WDS ローバー で好評な機能はそのままに
21 e-learning Development of Real-time Learner Detection System for e-learning
 21 e-learning Development of Real-time Learner Detection System for e-learning 1100349 2010 3 1 e-learning WBT (Web Based training) e-learning LMS (Learning Management System) LMS WBT e-learning e-learning
21 e-learning Development of Real-time Learner Detection System for e-learning 1100349 2010 3 1 e-learning WBT (Web Based training) e-learning LMS (Learning Management System) LMS WBT e-learning e-learning
投写距離カリキュレーター シンプルモードとアドバンスモードを切り替えることができます シンプルモード アドバンスモード
 投写距離カリキュレーター シンプルモードとアドバンスモードを切り替えることができます シンプルモード アドバンスモード シンプルモード / アドバンスモード共通 1 2 5 3 4 6 8 9 7 10 11 1 言語選択 日本語と英語の切り替えができます 2 モード切替えボタン シンプルモードとアドバンスモードの切替えができます 3 ヘルプボタン このヘルプファイルを表示します 4 印刷ボタン ブラウザの印刷機能を呼び出します
投写距離カリキュレーター シンプルモードとアドバンスモードを切り替えることができます シンプルモード アドバンスモード シンプルモード / アドバンスモード共通 1 2 5 3 4 6 8 9 7 10 11 1 言語選択 日本語と英語の切り替えができます 2 モード切替えボタン シンプルモードとアドバンスモードの切替えができます 3 ヘルプボタン このヘルプファイルを表示します 4 印刷ボタン ブラウザの印刷機能を呼び出します
Microsoft PowerPoint - 写測学会.pptx
 UAV 空撮画像における 3 次元モデリング (SfM/MVS) ソフトウェアの形状特性比較 阪南大学 北川悦司 北川悦司 博士 ( 情報学 ) 自己紹介 阪南大学経営情報学部教授 23 歳の時に IT ベンチャー企業を起業 約 12 年間で様々な業務をこなす 現在は個人事業主として企業と共同研究や受託開発などを行っている専門分野 :IT 全般 写真測量,3 次元点群処理, 画像処理,SLAM その他,
UAV 空撮画像における 3 次元モデリング (SfM/MVS) ソフトウェアの形状特性比較 阪南大学 北川悦司 北川悦司 博士 ( 情報学 ) 自己紹介 阪南大学経営情報学部教授 23 歳の時に IT ベンチャー企業を起業 約 12 年間で様々な業務をこなす 現在は個人事業主として企業と共同研究や受託開発などを行っている専門分野 :IT 全般 写真測量,3 次元点群処理, 画像処理,SLAM その他,
PowerPoint プレゼンテーション
 エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
<4D F736F F D20837E836A837D E82CC88D98FED E12E646F63>
 振動分析計 VA-12 を用いた精密診断事例 リオン株式会社 振動分析計 VA-12 を用いた精密診断事例を紹介します 振動分析計 VA-12 は 振動計と高機能 FFT アナライザが一体となったハンディタイプの測定器です 振動計として使用する場合は加速度 速度 変位の同時計測 FFT アナライザとして使用する場合は 3200 ライン分解能 20kHz の連続リアルタイム分析が可能です また カラー液晶に日本語表示がされます
振動分析計 VA-12 を用いた精密診断事例 リオン株式会社 振動分析計 VA-12 を用いた精密診断事例を紹介します 振動分析計 VA-12 は 振動計と高機能 FFT アナライザが一体となったハンディタイプの測定器です 振動計として使用する場合は加速度 速度 変位の同時計測 FFT アナライザとして使用する場合は 3200 ライン分解能 20kHz の連続リアルタイム分析が可能です また カラー液晶に日本語表示がされます
センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 -
 センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 - 目次 1: スペック... - 3-2: 付属品を確かめる... - 4-3: 時間設定 接続方法... - 4 - ... - 4 -
センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 - 目次 1: スペック... - 3-2: 付属品を確かめる... - 4-3: 時間設定 接続方法... - 4 - ... - 4 -
Microsoft Word - 犬飼.doc
 2004 年度卒業研究 肌色抽出について 岡山理科大学 総合情報学部 情報科学科 澤見研究室 I01I013 犬飼芳久 目次 1 はじめに 2 2 色空間に注目した肌色抽出手法 2.1 肌色抽出の手法について 2.2 色空間について 2.2.1 RGB 2.2.2 XYZ 2.2.3 L*a*b* 2.2.4 YCbCr 2.2.5 YIQ 2.2.6 HSV 2.2.7 修正 HSV 2.3 画素分布における検討
2004 年度卒業研究 肌色抽出について 岡山理科大学 総合情報学部 情報科学科 澤見研究室 I01I013 犬飼芳久 目次 1 はじめに 2 2 色空間に注目した肌色抽出手法 2.1 肌色抽出の手法について 2.2 色空間について 2.2.1 RGB 2.2.2 XYZ 2.2.3 L*a*b* 2.2.4 YCbCr 2.2.5 YIQ 2.2.6 HSV 2.2.7 修正 HSV 2.3 画素分布における検討
PowerPoint Presentation
 更新日 :2004/7/13 プロモデル使用カメラ 3rdEye プロモデル標準ネットワークカメラ ライブの分割表示 Axis2100 Axis2120 インターネットを通して離れた場所のライブ映像を閲覧することができます 分割表示 / 拡大表示の切替えが可能です Axis2120 はオートアイリス機能により 明るさが不足していても正確な画像を撮影することができます ライブの拡大表示 NetCam
更新日 :2004/7/13 プロモデル使用カメラ 3rdEye プロモデル標準ネットワークカメラ ライブの分割表示 Axis2100 Axis2120 インターネットを通して離れた場所のライブ映像を閲覧することができます 分割表示 / 拡大表示の切替えが可能です Axis2120 はオートアイリス機能により 明るさが不足していても正確な画像を撮影することができます ライブの拡大表示 NetCam
する距離を一定に保ち温度を変化させた場合のセンサーのカウント ( センサーが計測した距離 ) の変化を調べた ( 図 4) 実験で得られたセンサーの温度変化とカウント変化の一例をグラフ 1 に載せる グラフにおいて赤いデータ点がセンサーのカウント値である 計測距離一定で実験を行ったので理想的にはカウ
 の変化を調べた ( 図 4) 実験で得られたセンサーの温度変化とカウント変化の一例をグラフ 1 に載せる グラフにおいて赤いデータ点がセンサーのカウント値である 計測距離一定で実験を行ったので理想的にはカウ") 岡山 3.8m 新望遠鏡制御系のための多点温度計開発 京都大学理学研究科宇宙物理学教室 M1 出口和弘 1. 岡山 3.8m 新望遠鏡に使われる分割鏡のメリットと技術的ハードル我々は現在 京都大学を中心として国立天文台 岡山天体物理観測所に新技術を用いた口径 3.8m の可視 近赤外望遠鏡の建設を計画している ( 図 1) 新技術の一つとして望遠鏡の主鏡に一枚鏡ではなく 扇型のセグメントを組み合わせて一枚の円形の鏡にする分割鏡を採用している
岡山 3.8m 新望遠鏡制御系のための多点温度計開発 京都大学理学研究科宇宙物理学教室 M1 出口和弘 1. 岡山 3.8m 新望遠鏡に使われる分割鏡のメリットと技術的ハードル我々は現在 京都大学を中心として国立天文台 岡山天体物理観測所に新技術を用いた口径 3.8m の可視 近赤外望遠鏡の建設を計画している ( 図 1) 新技術の一つとして望遠鏡の主鏡に一枚鏡ではなく 扇型のセグメントを組み合わせて一枚の円形の鏡にする分割鏡を採用している
マップマッチングのアルゴリズム
 マップマッチングのアルゴリズム 羽藤英二 伊藤創太 伊藤篤志編 : ネットワーク行動学 ( BinN studies シリーズ ), pp.84-106,2014. 2015/05/29 理論勉強会 #7 M1 山本萌美 もくじ マップマッチングとは? マップマッチングのバリエーション Point to Point map-matching Point to Curve map-matching Curve
マップマッチングのアルゴリズム 羽藤英二 伊藤創太 伊藤篤志編 : ネットワーク行動学 ( BinN studies シリーズ ), pp.84-106,2014. 2015/05/29 理論勉強会 #7 M1 山本萌美 もくじ マップマッチングとは? マップマッチングのバリエーション Point to Point map-matching Point to Curve map-matching Curve
取り組みの背景目的計測点群処理の課題とポリゴン活 体制機能概要と本システムの特徴機能詳細システム構成問合せ先
 計測点群のポリゴン化による トンネル施工 検査業務の 効率化への取り組み 2017 年 日本ユニシス エクセリューションズ株式会社 ユニアデックス株式会社 1 2 3 4 5 6 7 8 取り組みの背景目的計測点群処理の課題とポリゴン活 体制機能概要と本システムの特徴機能詳細システム構成問合せ先 1. 取り組みの背景 国土交通省が推進する i-construction の重要施策である レーザスキャナや
計測点群のポリゴン化による トンネル施工 検査業務の 効率化への取り組み 2017 年 日本ユニシス エクセリューションズ株式会社 ユニアデックス株式会社 1 2 3 4 5 6 7 8 取り組みの背景目的計測点群処理の課題とポリゴン活 体制機能概要と本システムの特徴機能詳細システム構成問合せ先 1. 取り組みの背景 国土交通省が推進する i-construction の重要施策である レーザスキャナや
小型移動ロボット
 小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
Coding theorems for correlated sources with cooperative information
 グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
高度交通システムの 研究
 高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
dji.htm - 無題 <標準モード>
 Mavic Air MAVIC PRO 主な特長 主な特長 32MPスフィアパノラマ折りたたみ設計 & 優れた携帯性 3 軸ジンバル & 4Kカメラ 3 方向障害物検知スマートキャプチャー最大飛行時間 21 分高度操縦支援システム (APAS) 折りたたみ式 4Kカメラ RAWフォーマット写真 7km 動画伝送最大 27 分の飛行時間 ハイライト 寸法 168 83 49 mm (L W H) 168
Mavic Air MAVIC PRO 主な特長 主な特長 32MPスフィアパノラマ折りたたみ設計 & 優れた携帯性 3 軸ジンバル & 4Kカメラ 3 方向障害物検知スマートキャプチャー最大飛行時間 21 分高度操縦支援システム (APAS) 折りたたみ式 4Kカメラ RAWフォーマット写真 7km 動画伝送最大 27 分の飛行時間 ハイライト 寸法 168 83 49 mm (L W H) 168
情報処理学会研究報告 IPSJ SIG Technical Report 被写界深度に存在する主体物体の自動検出法の提案 萩原健太, 小枝正直 1 本研究では被写界深度に存在する物体の自動検出法の提案を提案する. 本手法を用いることにより,1 枚の静止画像中にある主体物体と非主体物体の分別が可能にな
 被写界深度に存在する主体物体の自動検出法の提案 萩原健太, 小枝正直 1 本研究では被写界深度に存在する物体の自動検出法の提案を提案する. 本手法を用いることにより,1 枚の静止画像中にある主体物体と非主体物体の分別が可能になる. 具体的には, まず 2 種類のエッジ抽出を組み合わせることで被写界深度に含まれる主体物体の特徴点群を検出する. その後, 得られた特徴点群を包囲する領域を 2 種類の手法により動的に求める.
被写界深度に存在する主体物体の自動検出法の提案 萩原健太, 小枝正直 1 本研究では被写界深度に存在する物体の自動検出法の提案を提案する. 本手法を用いることにより,1 枚の静止画像中にある主体物体と非主体物体の分別が可能になる. 具体的には, まず 2 種類のエッジ抽出を組み合わせることで被写界深度に含まれる主体物体の特徴点群を検出する. その後, 得られた特徴点群を包囲する領域を 2 種類の手法により動的に求める.
1.民営化
 参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
連続講座 断層映像法の基礎第 34 回 : 篠原 広行 他 放射状に 線を照射し 対面に検出器の列を置いておき 一度に 1 つの角度データを取得する 後は全体を 1 回転しながら次々と角度データを取得することで計測を終了する この計測で得られる投影はとなる ここで l はファンビームのファンに沿った
 連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
インターリーブADCでのタイミングスキュー影響のデジタル補正技術
 1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
物性物理学 I( 平山 ) 補足資料 No.6 ( 量子ポイントコンタクト ) 右図のように 2つ物質が非常に小さな接点を介して接触している状況を考えましょう 物質中の電子の平均自由行程に比べて 接点のサイズが非常に小さな場合 この接点を量子ポイントコンタクトと呼ぶことがあります この系で左右の2つ
 補足資料 No.6 ( 量子ポイントコンタクト ) 右図のように 2つ物質が非常に小さな接点を介して接触している状況を考えましょう 物質中の電子の平均自由行程に比べて 接点のサイズが非常に小さな場合 この接点を量子ポイントコンタクトと呼ぶことがあります この系で左右の2つ") 物性物理学 I( 平山 ) 補足資料 No.6 ( 量子ポイントコンタクト ) 右図のように つ物質が非常に小さな接点を介して接触している状況を考えましょう 物質中の電子の平均自由行程に比べて 接点のサイズが非常に小さな場合 この接点を量子ポイントコンタクトと呼ぶことがあります この系で左右のつの物質の間に電位差を設けて左から右に向かって電流を流すことを行った場合に接点を通って流れる電流を求めるためには
物性物理学 I( 平山 ) 補足資料 No.6 ( 量子ポイントコンタクト ) 右図のように つ物質が非常に小さな接点を介して接触している状況を考えましょう 物質中の電子の平均自由行程に比べて 接点のサイズが非常に小さな場合 この接点を量子ポイントコンタクトと呼ぶことがあります この系で左右のつの物質の間に電位差を設けて左から右に向かって電流を流すことを行った場合に接点を通って流れる電流を求めるためには
Microsoft PowerPoint - mp11-06.pptx
 数理計画法第 6 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 第 5 章組合せ計画 5.2 分枝限定法 組合せ計画問題 組合せ計画問題とは : 有限個の もの の組合せの中から, 目的関数を最小または最大にする組合せを見つける問題 例 1: 整数計画問題全般
数理計画法第 6 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 第 5 章組合せ計画 5.2 分枝限定法 組合せ計画問題 組合せ計画問題とは : 有限個の もの の組合せの中から, 目的関数を最小または最大にする組合せを見つける問題 例 1: 整数計画問題全般
目次 1: スペック 2 ページ 2: 付属品を確かめる 3 ページ 3: 時間設定 接続方法 3 ページ 3-1: 時間設定の方法について 3 ページ 3-2: カメラ本体に microsd カードを装着 3 ページ 3-3: カメラ本体に付属アダプタを接続 4 ページ 4: 録画 & 録音方法と
 目次 1: スペック 2 ページ 2: 付属品を確かめる 3 ページ 3: 時間設定 接続方法 3 ページ 3-1: 時間設定の方法について 3 ページ 3-2: カメラ本体に microsd カードを装着 3 ページ 3-3: カメラ本体に付属アダプタを接続 4 ページ 4: 録画 & 録音方法と LED 点灯方法 4 ページ 4-1: 録画 & 録音と LED ライトについて 4 ページ 4-2:
目次 1: スペック 2 ページ 2: 付属品を確かめる 3 ページ 3: 時間設定 接続方法 3 ページ 3-1: 時間設定の方法について 3 ページ 3-2: カメラ本体に microsd カードを装着 3 ページ 3-3: カメラ本体に付属アダプタを接続 4 ページ 4: 録画 & 録音方法と LED 点灯方法 4 ページ 4-1: 録画 & 録音と LED ライトについて 4 ページ 4-2:
CSM_FZ5_SDNB-031_10_3
 0120-919-066 www.fa.omron.co.jp 1 2 0120-919-066 www.fa.omron.co.jp 0120-919-066 www.fa.omron.co.jp 3 4 0120-919-066 www.fa.omron.co.jp 0120-919-066 www.fa.omron.co.jp 5 6 0120-919-066 www.fa.omron.co.jp
0120-919-066 www.fa.omron.co.jp 1 2 0120-919-066 www.fa.omron.co.jp 0120-919-066 www.fa.omron.co.jp 3 4 0120-919-066 www.fa.omron.co.jp 0120-919-066 www.fa.omron.co.jp 5 6 0120-919-066 www.fa.omron.co.jp
(Microsoft PowerPoint -
 NX 5 新機能紹介 Gateway / Styling / Modeling / Assemblies NX Sheet Metal / Drafting 1 Gateway ダイアログの改善 テンプレート リドゥ (Redo) ビュートライアド カメラ PDF 出力 2 Gateway ユーザビリティ ダイアログの改善 コマンド間でのダイアログ構成の統一 ガイド表示の追加 ( 選択ステップのハイライト等
NX 5 新機能紹介 Gateway / Styling / Modeling / Assemblies NX Sheet Metal / Drafting 1 Gateway ダイアログの改善 テンプレート リドゥ (Redo) ビュートライアド カメラ PDF 出力 2 Gateway ユーザビリティ ダイアログの改善 コマンド間でのダイアログ構成の統一 ガイド表示の追加 ( 選択ステップのハイライト等
Vectorworks 投影シミュレーションプラグイン
 1 概要 Vectorworks 投影シミュレーションプラグイン 利用ガイド 第 1 版 2015 年 4 月 2 日 1 Copyright 2015 ORIHALCON Technologies.All Rights Reserved. 1 概要 1 概要 投影シミュレーションプラグイン は Vectorworks 上で実際のプロジェクターやレンズパラメータを もとに 正確な 3D 投影シミュレーションを行うためのツールです
1 概要 Vectorworks 投影シミュレーションプラグイン 利用ガイド 第 1 版 2015 年 4 月 2 日 1 Copyright 2015 ORIHALCON Technologies.All Rights Reserved. 1 概要 1 概要 投影シミュレーションプラグイン は Vectorworks 上で実際のプロジェクターやレンズパラメータを もとに 正確な 3D 投影シミュレーションを行うためのツールです
News Release 国立研究開発法人新エネルギー 産業技術総合開発機構 福島県 南相馬市 株式会社 SUBARU 日本無線株式会社 日本アビオニクス株式会社 三菱電機株式会社 株式会社自律制御システム研究所 世界初 無人航空機に搭載した衝突回避システムの探知性能試験を実施
 News Release 2018.12.14 国立研究開発法人新エネルギー 産業技術総合開発機構 福島県 南相馬市 株式会社 SUBARU 日本無線株式会社 日本アビオニクス株式会社 三菱電機株式会社 株式会社自律制御システム研究所 世界初 無人航空機に搭載した衝突回避システムの探知性能試験を実施 福島ロボットテストフィールドで 有人ヘリコプター衝突回避の模擬飛行試験 NEDO ( 株 )SUBARU
News Release 2018.12.14 国立研究開発法人新エネルギー 産業技術総合開発機構 福島県 南相馬市 株式会社 SUBARU 日本無線株式会社 日本アビオニクス株式会社 三菱電機株式会社 株式会社自律制御システム研究所 世界初 無人航空機に搭載した衝突回避システムの探知性能試験を実施 福島ロボットテストフィールドで 有人ヘリコプター衝突回避の模擬飛行試験 NEDO ( 株 )SUBARU
スライド 1
 5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
Chap2.key
 . f( ) V (V V ) V e + V e V V V V ( ) V V ( ) E. - () V (0 ) () V (0 ) () V (0 ) (4) V ( ) E. - () V (0 ) () V (0 ) O r θ ( ) ( ) : (r θ) : { r cos θ r sn θ { r + () V (0 ) (4) V ( ) θ θ arg( ) : π π
. f( ) V (V V ) V e + V e V V V V ( ) V V ( ) E. - () V (0 ) () V (0 ) () V (0 ) (4) V ( ) E. - () V (0 ) () V (0 ) O r θ ( ) ( ) : (r θ) : { r cos θ r sn θ { r + () V (0 ) (4) V ( ) θ θ arg( ) : π π
【3Dプレゼン拡張機能】トレーニングマニュアル1_vol2
 3D プレゼン拡張機能 トレーニングマニュアル 1 ウェブトゥダイレクト 3D 画面周り 実装機能の解説 Vol.2 この章では 3Dプレゼン拡張機能の ウェブトゥダイレクト3D ( 以下 WTD-3D) の画面回りと実装機能の解説を行います パースメニュー画面の WTD-3D は パース作成を行う外観/ 内観の視点登録や 3D 添景部品を専用 WEB からダイレクトに配置してパースモードに移動して仕上実行
3D プレゼン拡張機能 トレーニングマニュアル 1 ウェブトゥダイレクト 3D 画面周り 実装機能の解説 Vol.2 この章では 3Dプレゼン拡張機能の ウェブトゥダイレクト3D ( 以下 WTD-3D) の画面回りと実装機能の解説を行います パースメニュー画面の WTD-3D は パース作成を行う外観/ 内観の視点登録や 3D 添景部品を専用 WEB からダイレクトに配置してパースモードに移動して仕上実行
コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10
5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10") コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10 モデリングの仕上げモデルをどう見せるか? 作成した 3DCG モデルは 最終的には 作品 として 2 次元の画像あるいは
コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10 モデリングの仕上げモデルをどう見せるか? 作成した 3DCG モデルは 最終的には 作品 として 2 次元の画像あるいは
ADS-win ご利用の皆様へ 平成 25 年 2 月 14 日 生活産業研究所株式会社 ADS-win の天空率計算における注意事項 この度 ADS-win の天空率算定時における注意事項を以下の通りまとめましたので ご利用の際にはご 確認くださいますようお願いいたします (ads-lax 及び
 ADS-win ご利用の皆様へ 平成 25 年 2 月 14 日 生活産業研究所株式会社 ADS-win の天空率計算における注意事項 この度 ADS-win の天空率算定時における注意事項を以下の通りまとめましたので ご利用の際にはご 確認くださいますようお願いいたします (ads-lax 及び ADS-LA 共通の内容となっています ) 天空率システム計算実行前の計算条件の確認について ADS-win
ADS-win ご利用の皆様へ 平成 25 年 2 月 14 日 生活産業研究所株式会社 ADS-win の天空率計算における注意事項 この度 ADS-win の天空率算定時における注意事項を以下の通りまとめましたので ご利用の際にはご 確認くださいますようお願いいたします (ads-lax 及び ADS-LA 共通の内容となっています ) 天空率システム計算実行前の計算条件の確認について ADS-win
Microsoft PowerPoint - ip02_01.ppt [互換モード]
![Microsoft PowerPoint - ip02_01.ppt [互換モード]](/thumbs/96/127250376.jpg "Microsoft PowerPoint - ip02_01.ppt [互換モード]") 空間周波数 周波数領域での処理 空間周波数 (spatial frquncy) とは 単位長さ当たりの正弦波状の濃淡変化の繰り返し回数を表したもの 正弦波 : y sin( t) 周期 : 周波数 : T f / T 角周波数 : f 画像処理 空間周波数 周波数領域での処理 波形が違うと 周波数も違う 画像処理 空間周波数 周波数領域での処理 画像処理 3 周波数領域での処理 周波数は一つしかない?-
空間周波数 周波数領域での処理 空間周波数 (spatial frquncy) とは 単位長さ当たりの正弦波状の濃淡変化の繰り返し回数を表したもの 正弦波 : y sin( t) 周期 : 周波数 : T f / T 角周波数 : f 画像処理 空間周波数 周波数領域での処理 波形が違うと 周波数も違う 画像処理 空間周波数 周波数領域での処理 画像処理 3 周波数領域での処理 周波数は一つしかない?-
3) 撮影 ( スキャン ) の方法 撮影( スキャン ) する場合の撮影エリアと撮影距離の関係を調査の上 おおよその撮影距離を定める - 今回調査を行った代表的なスマホの画角では 30cm 程度の距離であった これより離れた距離から撮影すると解像度規定を満足しない事より この 30cm 以内で撮影
 撮影 ( スキャン ) の方法 撮影( スキャン ) する場合の撮影エリアと撮影距離の関係を調査の上 おおよその撮影距離を定める - 今回調査を行った代表的なスマホの画角では 30cm 程度の距離であった これより離れた距離から撮影すると解像度規定を満足しない事より この 30cm 以内で撮影") スマホでの国税関係書類を記録する場合の留意事項 2016 年 ( 平成 28 年 )8 月公益社団法人日本文書情報マネジメント協会 電子帳簿保存法スキャナ保存の画質要件とスマホでの満足するための考え方 1) 電子帳簿保存法スキャナ保存の画質要件 解像度 ( 施行規則 3 条 5 項二号イ (1)): 200dpi 以上 カラー / 階調 ( 施行規則 3 条 5 項二号イ (2)): RGB 各 256
スマホでの国税関係書類を記録する場合の留意事項 2016 年 ( 平成 28 年 )8 月公益社団法人日本文書情報マネジメント協会 電子帳簿保存法スキャナ保存の画質要件とスマホでの満足するための考え方 1) 電子帳簿保存法スキャナ保存の画質要件 解像度 ( 施行規則 3 条 5 項二号イ (1)): 200dpi 以上 カラー / 階調 ( 施行規則 3 条 5 項二号イ (2)): RGB 各 256
<4D F736F F D DC58F498D5A814091E6318FCD814089E6919C82C682CD89BD82A92E646F63>
 第 1 章画像とは何か 第 1 章画像とは何か 画像 は英語では image であり 実際に存在する もの を 絵に描いたり カメラで撮影したりしたものである キャンバス フィルム 印画紙などに記録されて 現物が破壊されるなどで存在しなくなっても 遠方にあって直接見ることが不可能であっても 保存 伝送されていつでも どこでも自由に見ることが可能となる 本書で述べる 画像処理 はこの画像を入力とした処理である
第 1 章画像とは何か 第 1 章画像とは何か 画像 は英語では image であり 実際に存在する もの を 絵に描いたり カメラで撮影したりしたものである キャンバス フィルム 印画紙などに記録されて 現物が破壊されるなどで存在しなくなっても 遠方にあって直接見ることが不可能であっても 保存 伝送されていつでも どこでも自由に見ることが可能となる 本書で述べる 画像処理 はこの画像を入力とした処理である
FLIRTools+デモ手順書
 FLIRTools+ 簡易取扱説明書 FLIR Tools+ 手順書 1. FLIR ToolsをPCにインストールする 2. Tools+ ライセンス番号を認識させる 3. カメラの電源を入れ USBでPCと接続する 4. 表示設定 5. 静止画を撮影する 6. 動画記録スピードを設定する 7. 動画を記録する / 停止する 8. 動画からグラフを作成する 9. グラフデータ ( 温度値 ) をExcelにペーストする
FLIRTools+ 簡易取扱説明書 FLIR Tools+ 手順書 1. FLIR ToolsをPCにインストールする 2. Tools+ ライセンス番号を認識させる 3. カメラの電源を入れ USBでPCと接続する 4. 表示設定 5. 静止画を撮影する 6. 動画記録スピードを設定する 7. 動画を記録する / 停止する 8. 動画からグラフを作成する 9. グラフデータ ( 温度値 ) をExcelにペーストする
構造力学Ⅰ第12回
 第 回材の座屈 (0 章 ) p.5~ ( 復習 ) モールの定理 ( 手順 ) 座屈とは 荷重により梁に生じた曲げモーメントをで除して仮想荷重と考える 座屈荷重 偏心荷重 ( 曲げと軸力 ) 断面の核 この仮想荷重に対するある点でのせん断力 たわみ角に相当する曲げモーメント たわみに相当する ( 例 ) 単純梁の支点のたわみ角 : は 図 を仮想荷重と考えたときの 点の支点反力 B は 図 を仮想荷重と考えたときのB
第 回材の座屈 (0 章 ) p.5~ ( 復習 ) モールの定理 ( 手順 ) 座屈とは 荷重により梁に生じた曲げモーメントをで除して仮想荷重と考える 座屈荷重 偏心荷重 ( 曲げと軸力 ) 断面の核 この仮想荷重に対するある点でのせん断力 たわみ角に相当する曲げモーメント たわみに相当する ( 例 ) 単純梁の支点のたわみ角 : は 図 を仮想荷重と考えたときの 点の支点反力 B は 図 を仮想荷重と考えたときのB
Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]
![Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]](/thumbs/94/121508518.jpg "Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]") 22 年国家試験解答 1,5 フーリエ変換は線形変換 FFT はデータ数に 2 の累乗数を要求するが DFT は任意のデータ数に対応 123I-IMP Brain SPECT FBP with Ramp filter 123I-IMP Brain SPECT FBP with Shepp&Logan filter 99mTc-MIBI Myocardial SPECT における ストリークアーチファクト
22 年国家試験解答 1,5 フーリエ変換は線形変換 FFT はデータ数に 2 の累乗数を要求するが DFT は任意のデータ数に対応 123I-IMP Brain SPECT FBP with Ramp filter 123I-IMP Brain SPECT FBP with Shepp&Logan filter 99mTc-MIBI Myocardial SPECT における ストリークアーチファクト
Microsoft Word - 要領.doc
 テストハンマーによるコンクリート強度推定要領 平成 25 年 7 月 熊本県土木部 テストハンマーによるコンクリート強度推定要領本要領は 硬化コンクリートのテストハンマー強度の試験方法 ( 案 ) (2010 制定コンクリート標準示方書 [ 規準編 ] JSCE-G 504-2007) 及び テストハンマーによる強度推定調査の 6 つのポイント ( 平成 13 年 独立行政法人土木研究所 ) を参考に作成したものです
テストハンマーによるコンクリート強度推定要領 平成 25 年 7 月 熊本県土木部 テストハンマーによるコンクリート強度推定要領本要領は 硬化コンクリートのテストハンマー強度の試験方法 ( 案 ) (2010 制定コンクリート標準示方書 [ 規準編 ] JSCE-G 504-2007) 及び テストハンマーによる強度推定調査の 6 つのポイント ( 平成 13 年 独立行政法人土木研究所 ) を参考に作成したものです
コンピュータグラフィックス第6回
 コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
加振装置の性能に関する検証方法 Verification Method of Vibratory Apparatus DC-X デジタルカメラの手ぶれ補正効果に関する測定方法および表記方法 ( 光学式 ) 発行 一般社団法人カメラ映像機器工業会 Camera & Imaging Pr
 発行 一般社団法人カメラ映像機器工業会 Camera & Imaging Pr") 加振装置の性能に関する検証方法 Verification Method of Vibratory Apparatus DC-X011-2012 デジタルカメラの手ぶれ補正効果に関する測定方法および表記方法 ( 光学式 ) 発行 一般社団法人カメラ映像機器工業会 Camera & Imaging Products Association 目 次 1. まえがき ------------------------------------------------------------------------------------------------------
加振装置の性能に関する検証方法 Verification Method of Vibratory Apparatus DC-X011-2012 デジタルカメラの手ぶれ補正効果に関する測定方法および表記方法 ( 光学式 ) 発行 一般社団法人カメラ映像機器工業会 Camera & Imaging Products Association 目 次 1. まえがき ------------------------------------------------------------------------------------------------------
概論 : 人工の爆発と自然地震の違い ~ 波形の違いを調べる前に ~ 人為起源の爆発が起こり得ない場所がある 震源決定の結果から 人為起源の爆発ではない事象が ある程度ふるい分けられる 1 深い場所 ( 深さ約 2km 以上での爆発は困難 ) 2 海底下 ( 海底下での爆発は技術的に困難 ) 海中や
 2 海底下 ( 海底下での爆発は技術的に困難 ) 海中や") 地震波からみた自然地震と爆発の 識別について 平成 22 年 9 月 9 日 ( 財 ) 日本気象協会 NDC-1 概論 : 人工の爆発と自然地震の違い ~ 波形の違いを調べる前に ~ 人為起源の爆発が起こり得ない場所がある 震源決定の結果から 人為起源の爆発ではない事象が ある程度ふるい分けられる 1 深い場所 ( 深さ約 2km 以上での爆発は困難 ) 2 海底下 ( 海底下での爆発は技術的に困難
地震波からみた自然地震と爆発の 識別について 平成 22 年 9 月 9 日 ( 財 ) 日本気象協会 NDC-1 概論 : 人工の爆発と自然地震の違い ~ 波形の違いを調べる前に ~ 人為起源の爆発が起こり得ない場所がある 震源決定の結果から 人為起源の爆発ではない事象が ある程度ふるい分けられる 1 深い場所 ( 深さ約 2km 以上での爆発は困難 ) 2 海底下 ( 海底下での爆発は技術的に困難
G800
 防水 防塵 業務用デジタルカメラ 光学5倍ズーム 28-140 約1600万画素 高画質CMOS 35 判カメラ換算値 フルHD動画対応 CALS 防水/防塵 耐衝撃/耐薬品 メー トル フラッシュ 10 電子水準器 水平 アオリ対応 CALSモード すかし撮影 セキュリティ機能 カメラメモ 本カタログにおいてのレンズ焦点距離は全て35 判カメラ換算値です 現場仕様 妥協を許さないプロのために ハードな現場に必要な防水
防水 防塵 業務用デジタルカメラ 光学5倍ズーム 28-140 約1600万画素 高画質CMOS 35 判カメラ換算値 フルHD動画対応 CALS 防水/防塵 耐衝撃/耐薬品 メー トル フラッシュ 10 電子水準器 水平 アオリ対応 CALSモード すかし撮影 セキュリティ機能 カメラメモ 本カタログにおいてのレンズ焦点距離は全て35 判カメラ換算値です 現場仕様 妥協を許さないプロのために ハードな現場に必要な防水
Chap3.key
 区分求積法. 面積 ( )/ f () > n + n, S 長方形の和集合で近似 n f (n ) リーマン和 f (n ) 区分求積法 リーマン和 S S n n / n n f ()d リーマン積分 ( + ) + S (, f ( )) 微分の心 Zoom In して局所的な性質を調べる 積分の心 Zoom Ou して大域的な性質を調べる 曲線の長さ 領域の面積や体積 ある領域に含まれる物質の質量
区分求積法. 面積 ( )/ f () > n + n, S 長方形の和集合で近似 n f (n ) リーマン和 f (n ) 区分求積法 リーマン和 S S n n / n n f ()d リーマン積分 ( + ) + S (, f ( )) 微分の心 Zoom In して局所的な性質を調べる 積分の心 Zoom Ou して大域的な性質を調べる 曲線の長さ 領域の面積や体積 ある領域に含まれる物質の質量
CLEFIA_ISEC発表
 128 ビットブロック暗号 CLEFIA 白井太三 渋谷香士 秋下徹 盛合志帆 岩田哲 ソニー株式会社 名古屋大学 目次 背景 アルゴリズム仕様 設計方針 安全性評価 実装性能評価 まとめ 2 背景 AES プロジェクト開始 (1997~) から 10 年 AES プロジェクト 攻撃法の進化 代数攻撃 関連鍵攻撃 新しい攻撃法への対策 暗号設計法の進化 IC カード, RFID などのアプリケーション拡大
128 ビットブロック暗号 CLEFIA 白井太三 渋谷香士 秋下徹 盛合志帆 岩田哲 ソニー株式会社 名古屋大学 目次 背景 アルゴリズム仕様 設計方針 安全性評価 実装性能評価 まとめ 2 背景 AES プロジェクト開始 (1997~) から 10 年 AES プロジェクト 攻撃法の進化 代数攻撃 関連鍵攻撃 新しい攻撃法への対策 暗号設計法の進化 IC カード, RFID などのアプリケーション拡大
EnSightのご紹介
 オープン CAE シンポジウム 2014 汎用ポストプロセッサー EnSight の大規模データ対応 CEI ソフトウェア株式会社代表取締役吉川慈人 http://www.ceisoftware.co.jp/ 内容 大規模データで時間のかかる処理 クライアント サーバー機能 マルチスレッドによる並列処理 サーバーの分散処理 クライアントの分散処理 ( 分散レンダリング ) EnSightのOpenFOAMインターフェース
オープン CAE シンポジウム 2014 汎用ポストプロセッサー EnSight の大規模データ対応 CEI ソフトウェア株式会社代表取締役吉川慈人 http://www.ceisoftware.co.jp/ 内容 大規模データで時間のかかる処理 クライアント サーバー機能 マルチスレッドによる並列処理 サーバーの分散処理 クライアントの分散処理 ( 分散レンダリング ) EnSightのOpenFOAMインターフェース
2009 年 11 月 16 日版 ( 久家 ) 遠地 P 波の変位波形の作成 遠地 P 波の変位波形 ( 変位の時間関数 ) は 波線理論をもとに P U () t = S()* t E()* t P() t で近似的に計算できる * は畳み込み積分 (convolution) を表す ( 付録
 遠地 P 波の変位波形の作成 遠地 P 波の変位波形 ( 変位の時間関数 ) は 波線理論をもとに P U () t = S()* t E()* t P() t で近似的に計算できる * は畳み込み積分 (convolution) を表す ( 付録") 遠地 波の変位波形の作成 遠地 波の変位波形 ( 変位の時間関数 ) は 波線理論をもとに U () t S() t E() t () t で近似的に計算できる は畳み込み積分 (convolution) を表す ( 付録 参照 ) ここで St () は地震の断層運動によって決まる時間関数 1 E() t は地下構造によって生じる種々の波の到着を与える時間関数 ( ここでは 直達 波とともに 震源そばの地表での反射波や変換波を与える時間関数
遠地 波の変位波形の作成 遠地 波の変位波形 ( 変位の時間関数 ) は 波線理論をもとに U () t S() t E() t () t で近似的に計算できる は畳み込み積分 (convolution) を表す ( 付録 参照 ) ここで St () は地震の断層運動によって決まる時間関数 1 E() t は地下構造によって生じる種々の波の到着を与える時間関数 ( ここでは 直達 波とともに 震源そばの地表での反射波や変換波を与える時間関数
Microsoft PowerPoint - 第3回2.ppt
 講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
モデリングとは
 コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
3Dプリンタ用CADソフト Autodesk Meshmixer入門編[日本語版]
![3Dプリンタ用CADソフト Autodesk Meshmixer入門編[日本語版]](/thumbs/101/150216105.jpg "3Dプリンタ用CADソフト Autodesk Meshmixer入門編[日本語版]") ご購入はこちら. http://shop.cqpub.co.jp/hanbai 第 1 章操作メニュー ソフトウェアの立ち上げ時に表示されるトップ メニューと, 各メニューの役割について紹介します. ソフトウェアを使うにあたり, どこからスタートさせるのか確認しましょう. 最初に, 操作メニューから確認していきましょう. ソフトウェアを立ち上げると, 図 1-1 が現れます. この画面で, 大きく三つの操作メニュー
ご購入はこちら. http://shop.cqpub.co.jp/hanbai 第 1 章操作メニュー ソフトウェアの立ち上げ時に表示されるトップ メニューと, 各メニューの役割について紹介します. ソフトウェアを使うにあたり, どこからスタートさせるのか確認しましょう. 最初に, 操作メニューから確認していきましょう. ソフトウェアを立ち上げると, 図 1-1 が現れます. この画面で, 大きく三つの操作メニュー
SUALAB INTRODUCTION SUALAB Solution SUALAB は 人工知能 ( ディープラーニング ) による画像解析技術を通して 迅速 正確 そして使いやすいマシンビジョン用のディープラーニングソフトウェアライブラリーである SuaKIT を提供します これは 従来のマシン
 による画像解析技術を通して 迅速 正確 そして使いやすいマシンビジョン用のディープラーニングソフトウェアライブラリーである SuaKIT を提供します これは 従来のマシン") SuaKIT suɑ kít Deep learning S/WLibrary for MachineVision SuaKIT は ディスプレイ 太陽光 PCB 半導体など 様々な分野で使用できる メーカー独自のディープラーニングのマシンビジョンソフトウェアライブラリーです SuaKIT は 様々な産業分野から実際に取得された画像データに基づいて開発されました Samsung LG SK Hanwha
SuaKIT suɑ kít Deep learning S/WLibrary for MachineVision SuaKIT は ディスプレイ 太陽光 PCB 半導体など 様々な分野で使用できる メーカー独自のディープラーニングのマシンビジョンソフトウェアライブラリーです SuaKIT は 様々な産業分野から実際に取得された画像データに基づいて開発されました Samsung LG SK Hanwha
ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場
 をお使いになる 場") ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場合は まず Firmware を Ver1.9.2 以上にアップデートしてください 目次 1. Edge
ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場合は まず Firmware を Ver1.9.2 以上にアップデートしてください 目次 1. Edge
2.4GHz デジタル信号式一体型モニター ワイヤレスカメラ 4 台セット 取り扱い説明書 ~ 1 ~
 2.4GHz デジタル信号式一体型モニター ワイヤレスカメラ 4 台セット 取り扱い説明書 ~ 1 ~ 目次 1. ご使用頂く前に---------------------------------------------------------------------------------------2 2. 商品の付属品 ------------------------------------------------------------------------------------------3
2.4GHz デジタル信号式一体型モニター ワイヤレスカメラ 4 台セット 取り扱い説明書 ~ 1 ~ 目次 1. ご使用頂く前に---------------------------------------------------------------------------------------2 2. 商品の付属品 ------------------------------------------------------------------------------------------3
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
Microsoft Word - CMS_Colorgraphy_Color_Space_Calc.doc
 各種表色系の計算式.5. アドバンテック研究所 代表村上彰 表色系 (IE 93) IE で 93 年に採択した等色関数 x y, z, に基づく三色表色系である ( 視野 表色系ともいう ) 観測視野が視角 4 以下の場合に適用する 表色系における 反射による物体色の三刺激値 は次の式によって求められる k k k k x y z y d d d d (λ): 色の表示に用いる標準の光の分光分布
各種表色系の計算式.5. アドバンテック研究所 代表村上彰 表色系 (IE 93) IE で 93 年に採択した等色関数 x y, z, に基づく三色表色系である ( 視野 表色系ともいう ) 観測視野が視角 4 以下の場合に適用する 表色系における 反射による物体色の三刺激値 は次の式によって求められる k k k k x y z y d d d d (λ): 色の表示に用いる標準の光の分光分布
 メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
空間光変調器を用いた擬似振幅変調ホログラムによる光の空間モード変換 1. 研究目的 宮本研究室北谷拓磨 本研究は 中心に近づく程回折効率が小さくなるホログラムを作製し 空間光変調器 (spatial light modulator SLM) を用いて 1 次のラゲールガウスビーム (LG ビーム )
 を用いて 1 次のラゲールガウスビーム (LG ビーム )") 空間光変調器を用いた擬似振幅変調ホログラムによる光の空間モード変換 1. 研究目的 宮本研究室北谷拓磨 本研究は 中心に近づく程回折効率が小さくなるホログラムを作製し 空間光変調器 (spatial light modulator SLM) を用いて 1 次のラゲールガウスビーム (LG ビーム ) を正確に発生させることを目的とする このようなホログラムはまた 光子の軌道角運動量状態および軌道角運動量重ね合わせ状態の柔軟な検出及び操作を実現することが期待される
空間光変調器を用いた擬似振幅変調ホログラムによる光の空間モード変換 1. 研究目的 宮本研究室北谷拓磨 本研究は 中心に近づく程回折効率が小さくなるホログラムを作製し 空間光変調器 (spatial light modulator SLM) を用いて 1 次のラゲールガウスビーム (LG ビーム ) を正確に発生させることを目的とする このようなホログラムはまた 光子の軌道角運動量状態および軌道角運動量重ね合わせ状態の柔軟な検出及び操作を実現することが期待される
<4D F736F F F696E74202D20836F CC8A C58B858B4F93B982A882E682D1978E89BA814091B28BC68CA48B E >
 バットの角度 打球軌道および落下地点の関係 T999 和田真迪 担当教員 飯田晋司 目次 1. はじめに. ボールとバットの衝突 -1 座標系 -ボールとバットの衝突の前後でのボールの速度 3. ボールの軌道の計算 4. おわりに参考文献 はじめに この研究テーマにした理由は 好きな野球での小さい頃からの疑問であるバッテングについて 角度が変わればどう打球に変化が起こるのかが大学で学んだ物理と数学んだ物理と数学を使って判明できると思ったから
バットの角度 打球軌道および落下地点の関係 T999 和田真迪 担当教員 飯田晋司 目次 1. はじめに. ボールとバットの衝突 -1 座標系 -ボールとバットの衝突の前後でのボールの速度 3. ボールの軌道の計算 4. おわりに参考文献 はじめに この研究テーマにした理由は 好きな野球での小さい頃からの疑問であるバッテングについて 角度が変わればどう打球に変化が起こるのかが大学で学んだ物理と数学んだ物理と数学を使って判明できると思ったから
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
 直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
2017年度 金沢大・理系数学
 07 金沢大学 ( 理系 前期日程問題 解答解説のページへ 次の問いに答えよ ( 6 z + 7 = 0 を満たす複素数 z をすべて求め, それらを表す点を複素数平面上に図 示せよ ( ( で求めた複素数 z を偏角が小さい方から順に z, z, とするとき, z, z と 積 zz を表す 点が複素数平面上で一直線上にあることを示せ ただし, 偏角は 0 以上 未満とする -- 07 金沢大学
07 金沢大学 ( 理系 前期日程問題 解答解説のページへ 次の問いに答えよ ( 6 z + 7 = 0 を満たす複素数 z をすべて求め, それらを表す点を複素数平面上に図 示せよ ( ( で求めた複素数 z を偏角が小さい方から順に z, z, とするとき, z, z と 積 zz を表す 点が複素数平面上で一直線上にあることを示せ ただし, 偏角は 0 以上 未満とする -- 07 金沢大学
Microsoft PowerPoint - ARC-SWoPP2011OkaSlides.pptx
 データ値の局所性を利用した ライン共有キャッシュの提案 九州大学大学院 岡慶太郎 福本尚人 井上弘士 村上和彰 1 キャッシュメモリの大容量化 マルチコア プロセッサが主流 メモリウォール問題の深刻化 メモリアクセス要求増加 IOピンの制限 大容量の LL(Last Level) キャッシュを搭載 8MB の L3 キャッシュを搭載 Core i7 のチップ写真 * * http://www.atmarkit.co.jp/fsys/zunouhoudan/102zunou/corei7.html
データ値の局所性を利用した ライン共有キャッシュの提案 九州大学大学院 岡慶太郎 福本尚人 井上弘士 村上和彰 1 キャッシュメモリの大容量化 マルチコア プロセッサが主流 メモリウォール問題の深刻化 メモリアクセス要求増加 IOピンの制限 大容量の LL(Last Level) キャッシュを搭載 8MB の L3 キャッシュを搭載 Core i7 のチップ写真 * * http://www.atmarkit.co.jp/fsys/zunouhoudan/102zunou/corei7.html
スライド タイトルなし
 アンテナ狭小化に伴う方位分解能劣化 の改善と東京湾での評価結果 - 民需等の利活用拡大を目指して - 直線 4 アレイ ( 八木 ) 菱形 4 アレイ ( ダイポール ) 伊藤浩之, 千葉修, 小海尊宏, 大西喬之 *1 山田寛喜 *2 長野日本無線 ( 株 ) *1 新潟大学 *2 08 年 12 月 17 日 08 年海洋レーダ研究集会 No.1 目次 1. はじめに : 海洋レーダの課題 2.
アンテナ狭小化に伴う方位分解能劣化 の改善と東京湾での評価結果 - 民需等の利活用拡大を目指して - 直線 4 アレイ ( 八木 ) 菱形 4 アレイ ( ダイポール ) 伊藤浩之, 千葉修, 小海尊宏, 大西喬之 *1 山田寛喜 *2 長野日本無線 ( 株 ) *1 新潟大学 *2 08 年 12 月 17 日 08 年海洋レーダ研究集会 No.1 目次 1. はじめに : 海洋レーダの課題 2.
目次 ペトリネットの概要 適用事例
 ペトリネットを利用した状態遷移テスト 和田浩一 東京エレクトロン SDC FA グループ 目次 ペトリネットの概要 適用事例 ペトリネットの概要 - ペトリネットとは ペトリネット (Petri Net) とは カール アダム ペトリが 1962 年に発表した離散分散システムを数学的に表現する手法である 視覚的で 数学的な離散事象システムをモデル化するツールの一つである ペトリネットの概要 - ペトリネットの表記と挙動
ペトリネットを利用した状態遷移テスト 和田浩一 東京エレクトロン SDC FA グループ 目次 ペトリネットの概要 適用事例 ペトリネットの概要 - ペトリネットとは ペトリネット (Petri Net) とは カール アダム ペトリが 1962 年に発表した離散分散システムを数学的に表現する手法である 視覚的で 数学的な離散事象システムをモデル化するツールの一つである ペトリネットの概要 - ペトリネットの表記と挙動
isai300413web.indd
 2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
PowerPoint プレゼンテーション
 空間フィルタリング (spatal lterng) 入力画像の対応する画素値だけではなく その周囲 ( 近傍領域 ) の画素も含めた領域内の画素値を用いて 出力画像の対応する画素値を計算する処理 入力画像出力画像入力画像出力画像 画素ごとの濃淡変換 ( 階調処理 ) 領域に基づく濃淡変換 ( 空間フィルタリング ) 空間フィルタ (spatal lter) 線形フィルタ (lnear lter) w
空間フィルタリング (spatal lterng) 入力画像の対応する画素値だけではなく その周囲 ( 近傍領域 ) の画素も含めた領域内の画素値を用いて 出力画像の対応する画素値を計算する処理 入力画像出力画像入力画像出力画像 画素ごとの濃淡変換 ( 階調処理 ) 領域に基づく濃淡変換 ( 空間フィルタリング ) 空間フィルタ (spatal lter) 線形フィルタ (lnear lter) w
ホログラフィ ビームスプリッタ レーザ光 ミラー レーザ光 記録物体 ミラー 再生像 写真乾版 ホログラム 物体光 物体光 参照光 ミラー 再生光 ミラー ホログラムへの記録 ホログラムの再生 光の干渉を利用 光の回折を利用 2
 電子ホログラフィ技術を用いた 立体映像システムに関する研究開発 下馬場 朋禄 千葉大学大学院工学研究科 1 ホログラフィ ビームスプリッタ レーザ光 ミラー レーザ光 記録物体 ミラー 再生像 写真乾版 ホログラム 物体光 物体光 参照光 ミラー 再生光 ミラー ホログラムへの記録 ホログラムの再生 光の干渉を利用 光の回折を利用 2 電子ホログラフィ コンピュータ CGHを表示 LCD Controller
電子ホログラフィ技術を用いた 立体映像システムに関する研究開発 下馬場 朋禄 千葉大学大学院工学研究科 1 ホログラフィ ビームスプリッタ レーザ光 ミラー レーザ光 記録物体 ミラー 再生像 写真乾版 ホログラム 物体光 物体光 参照光 ミラー 再生光 ミラー ホログラムへの記録 ホログラムの再生 光の干渉を利用 光の回折を利用 2 電子ホログラフィ コンピュータ CGHを表示 LCD Controller
tottori2013-print.key
 1 / 152 3 / 152 2 / 152 4 / 152 5 / 152 7 / 152 6 / 152 8 / 152 9 / 152 11 / 152 Red: [R,G,B] = [255,0,0] Yellow [R,G,B] = [255, 255, 0] Magenta [R,G,B] = [255, 0, 255] W [R,G,B] = [ Green: [R,G,B] = [0,
1 / 152 3 / 152 2 / 152 4 / 152 5 / 152 7 / 152 6 / 152 8 / 152 9 / 152 11 / 152 Red: [R,G,B] = [255,0,0] Yellow [R,G,B] = [255, 255, 0] Magenta [R,G,B] = [255, 0, 255] W [R,G,B] = [ Green: [R,G,B] = [0,
文書番号 :PFA012 Revision :1.01 Photonfocus 社 PFRemote 機能 Window 株式会社アプロリンク
 Photonfocus 社 PFRemote 機能 Window 株式会社アプロリンク 目次 はじめに... 2 1 バージョン確認... 3 2 Window タブ... 4 2-1 Region of Interest... 4 2-2 Decimation... 5 2-3 Crosshairs... 6 2-4 Multi-ROI... 7 改定履歴... 9 1 はじめに この度は株式会社アプロリンク取り扱い製品をご使用いただき誠にありがとうございます
Photonfocus 社 PFRemote 機能 Window 株式会社アプロリンク 目次 はじめに... 2 1 バージョン確認... 3 2 Window タブ... 4 2-1 Region of Interest... 4 2-2 Decimation... 5 2-3 Crosshairs... 6 2-4 Multi-ROI... 7 改定履歴... 9 1 はじめに この度は株式会社アプロリンク取り扱い製品をご使用いただき誠にありがとうございます
Microsoft Word - 卒業論文.doc
 006 年度卒業研究 画像補間法を用いた拡大画像の比較 岡山理科大学総合情報学部情報科学科 澤見研究室 I03I04 兼安俊治 I03I050 境永 目次 はじめに ラスタ画像 3 画像補間法 3. ニアレストネイバー法 3. バイリニア法 3.3 バイキュービック法 4 DCT を用いた拡大画像手法 5 FIR 法 6 評価 6. SNR 6. PSNR 7 実験 7. 主観評価 7. 客観評価
006 年度卒業研究 画像補間法を用いた拡大画像の比較 岡山理科大学総合情報学部情報科学科 澤見研究室 I03I04 兼安俊治 I03I050 境永 目次 はじめに ラスタ画像 3 画像補間法 3. ニアレストネイバー法 3. バイリニア法 3.3 バイキュービック法 4 DCT を用いた拡大画像手法 5 FIR 法 6 評価 6. SNR 6. PSNR 7 実験 7. 主観評価 7. 客観評価
2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合) 断面の作成 寸法測定 異なる断面間の寸法測定 繰り返し処理...11 III. 操作手順 (Verifyの場合) 断面の作成... 1
 断面の作成 寸法測定 異なる断面間の寸法測定 繰り返し処理...11 III. 操作手順 (Verifyの場合) 断面の作成... 1") Geomagic Control / Verify 操作手順書 2D 断面における寸法測定 第 2 版 2016.6.1 会社名 連絡先変更初版 2016.3.10 新規発行 2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合)... 4 1. 断面の作成... 4 2. 寸法測定... 6 3. 異なる断面間の寸法測定... 9 4. 繰り返し処理...11 III.
Geomagic Control / Verify 操作手順書 2D 断面における寸法測定 第 2 版 2016.6.1 会社名 連絡先変更初版 2016.3.10 新規発行 2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合)... 4 1. 断面の作成... 4 2. 寸法測定... 6 3. 異なる断面間の寸法測定... 9 4. 繰り返し処理...11 III.
計算機シミュレーション
 . 運動方程式の数値解法.. ニュートン方程式の近似速度は, 位置座標 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます. 本来は が の極限をとらなければいけませんが, 有限の小さな値とすると 秒後の位置座標は速度を用いて, と近似できます. 同様にして, 加速度は, 速度 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます.
. 運動方程式の数値解法.. ニュートン方程式の近似速度は, 位置座標 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます. 本来は が の極限をとらなければいけませんが, 有限の小さな値とすると 秒後の位置座標は速度を用いて, と近似できます. 同様にして, 加速度は, 速度 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます.
( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims a
, ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims a") ( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims at the development of a mobile robot to perform greetings
( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims at the development of a mobile robot to perform greetings