Microsoft PowerPoint - CV10.ppt [互換モード]
|
|
|
- まいえ なみこし
- 7 years ago
- Views:
Transcription



1 カメラキャリブレーション 和歌山大学 2010 年 6 月 21 日
2 カメラキャリブレーション ( 校正 ) 実世界のカメラとカメラモデルとの対応付け 2
 レンズ光軸の方向 (R) - 内部パラメータ :")
: 6 個 (world coordinate")
3 カメラキャリブレーション項目 幾何学的キャリブレーション - 外部パラメータ : 6 世界座標系におけるレンズの中心座標 (t) レンズ光軸の方向 (R) - 内部パラメータ : 5 焦点距離 画像中心 画像像 ( 画素 ) サイズ 歪収差係数 カメラの外部変数 (extrinsic parameters): 6 個 (world coordinate system) 3
4 カメラキャリブレーション手順 1. 幾何学的 光学的特性が既知の対象物を撮影 2. 対象物固有の特徴 ( 特徴点の世界座標など ) とその画像特徴 ( その特徴点の画像座標 ) を対応付け ~ エピポーラ幾何 知識 ヒューリスティクス 3. カメラモデルに基づき モデルパラメータを推定モデルパラメ ~ 射影幾何 線形代数 数値解析 統計 4
5 キャリブレーションデータと安定性 ワールド座標と画像座標の対応点標 3 次元位置既知の特徴点 透視投影行列 P 安定性 既知の形状の特徴 平面上の特徴点 円 矩形など ホモグラフィ H レンズ歪み k, 画像座標同士の対応付け 3 次元位置未知の特徴点 軌跡など 基礎行列 FE F,E 簡便さ
6 Single Camera Calibration Extrinsic Parameters R : rotation matrix t : translation vector Intrinsic Parameters a f : focal length k : scale of the pixel coordinate axis u,v : image principal point 0 0 Camera Coordinate System Tsai s Method World Coordinate System Projective Camera Matrix Image Coordinate System
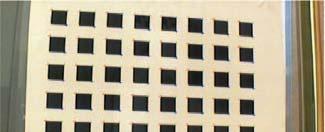
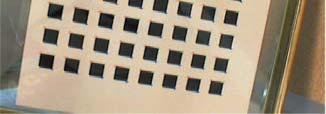
7 Example Calibration Pattern 非平面パターン平面パターン Calibration Pattern: Object with features of known size/geometry
8 Harris or Canny Corner Detector 手動か自動か入力画像からキャリブレーションパターンの特徴点を探し出す


9 カメラの内部パラメータ x f X Z x f X s x Z o x y f Y Z y f Y s Z y o y pixel size s, s x y X O image center o, o x y lens distortion k1, k 2 Z f focal length f Calibration = Determine the intrinsic parameters of a camera


10 キャリブレーション ( 内部パラメータ ) 幾何変換のパラメータ推定 透視投影 内部パラメータ X Uimage fkx 0 ox 0 Y Vimage 0 fk y oy 0 Z S 画像上の点や 3 次元空間中の点の座標を与えて パラメータを求める 最適化問題として定式化される
")



11 キャリブレーション ( 外部パラメータ ) ワールド座標系とカメラ座標系の下 t x, t y, t z と r 1,1 r 3,3 はカメラ外部パラメータ x y z 1,1 3,3 外部パラメータ


12 キャリブレーション ( 全パラメータ ) ワールド座標系と画像座標系の下で U V S image image P(3 4) X Y Z 1 world world world
13 透視投影モデルのキャリブレーション U V S image image P(3 4) X Y Z 1 world world world 行列 P 自由度 11 rank 3 画像上の点 三次元空間中の点 対応点 1 個 拘束 2 x PX 対応点 6 点以上の対応付けから求められる
14 Pの推定の線形解法 (6 points algorithm) 6 点以上の対応点から P を推定 線形最適化
15


16 行列で書くと n (n 6) 個の対応点から 2n の方程式 を最小にする P を求める は 2n 12 行列 ただしp=0 0 を除く とする (11 自由度 ) 最小二乗







17 通常の最小二乗法で微分 =0 とすると 明らかな解 p=0 しか求まらない ラグランジェの未定乗数法を使う ラグランジェ乗数 pはwの最小固有値に対応する固有ベクトル 固有方程式 pがwの固有ベクトルのとき成立
18 6 points algorithm の利点 欠点 利点 計算コストが小さい 数値計算的に安定 欠点 最小化の目的関数が 幾何学的にな意味を持たない 非線形解法 幾何学的に意味を持つ数値を最小化する
19 非線形解法 幾何学的に意味のある誤差を最小化 画像上の観測点と投影点の誤差を最小化 ( ) T T T T T 非線形最適化 ニュートン法 マーカート法など 精度は高いが 計算コストが高い 局所解が存在する 線形解を初期値にする
20 透視投影行列の分解 P を内部パラメータ K 回転 R 並進 t に分解 P= = 画像座標の傾き M=KR K: 上三角行列 Pの3 3の部分を M とするとM=KR K 上三角行列 R 正規直交行列よって QR 分解でK とRに分解できる また K が求まれば
21 透視投影行列 P の推定まとめ 3 次元座標が既知の点が必要が ワールド座標に対するカメラの位置ルド座標に対するカメラの位置 姿勢が求まる カメ台数を増やしも同じド座標 カメラの台数を増やしても 同じワールド座標に対する P を求めればよい
22 出席チェック 単眼カメラの幾何学的キャリブレーションについて 1) 透視投影行列 Pの自由度? ランク? 何点以上あれば求めることが可能ですか? 2) 紹介した透視投影行列 Pを求める方法 ( 線形 非線形 ) の利点 欠点をそれぞれ述べなさい
23 Two-view geometry 複数カメラ間のキャリブレーション 3D reconstruction Epipolar geometry E-matrix comp. F-matrix comp. H-matrix comp. Structure comp.
24 基礎行列 Fのキャリブレーション エピボラ平面 左カメラの画像点 右カメラの画像点 baseline from Hartley & Zisserman 画像間の対応点集合から基礎行列 F を推定 x T Fx=0 x x エピポーラ方程式










25 x T Fx=0 Fの推定 : 線形解法 ただし P 行列と同様に最小固有値に対応する固有ベクトルとして推定
26 非線形解法 線形解法の目的関数は幾何学的に無意味 非線形解法 目的関数 エピポーララインと対応点の距離 ステレオ復元後の再投影誤差 ニュートン法 マーカート法など 線形解を初期値とする







27 基礎行列の分解 内部パラメータ K が既知の場合 基礎行列 F から基本行列 E に変換 エピポール e e はどんな点にも対応するので eは O の最小値と対応する固有ベクトル O エピポール e は並進 t と同じ方向 ( スケールは不定 )






28 基礎行列の分解 また より の最小化によって R を求められる
29 エピポールを用いた平行化 epipolar pencil エピポーラペンシール H from Hartley & Zisserman エピポーラ線が平行になる変換
")

30 基礎行列から平行ステレオへ変換 corner 視差 (disparity) 姿勢や B の長さが分からなくても 形状を復元できる 長 エピポールさえ分かれば 形状復元ができる
31 基礎行列 F の推定まとめ 基礎行列は画像間の対応付けだけ ( 未知の点 ) 基礎行列からカメラ間の相対位置 姿勢の復元や 平行ステレオへの変換が可能 未校正の 2 枚の画像から カメラの姿勢の復元とシーンの形状復元が可能 ( ただしスケール不定 ) 自較正 uncalibrated stereo などと呼ばれる
32 内部パラメータのキャリブレーション Tsaiのアルゴリズム 3 次元座標既知の点から レンズ歪みを含む内部パラメータを推定 初期からソースコードが公開されていたため多 初期からソスコドが公開されていたため 多くの人たちが利用
33 Tsai のモデル カメラ座標 ワールド座標 投影面座標 焦点距離 回転 並進
34 Tsai のモデル 歪み座標 画像座標 スケール因子 ( 縦横比 ) 画像中心 歪み係数 サンプリング間隔 (CCD の幅 )
35 Tsai のモデル 回転 R 並進 T 6 パラメータ 焦点距離 f 1 パラメータ ひずみ係数 k 1 パラメータ 画像中心 1パラメータスケール因子 1パラメータサンプリング間隔 2パラメータ 12 パラメータの非線形最適化
36 例 入力画像 キャリブレーション後歪みを補正
37 Tsai の方法まとめ 3 次元位置既知の点から内部パラメータを推定 高次元 (12 パラメータ ) の非線形最適化 あまり安定ではないが ソースが公開されていたためよく使われた 最近は Zhang らの EasyCalib がよく使われる 平面上の座標既知の格子点 ( 平面の状態は未知 ) 数枚の平面から 歪みを含む内部 外部パラメータを推定 安定 精度は Tsai よりはいい OpenCV に含まれる
38 EasyCalib State-of-the-art calibration Z. Zhang: Flexible Camera Calibration By Viewing a Plane From Unknown Orientations (1999) Solves correspondence problem Works with planar calibration pad Works well in practice






39 格子点が直線になるように歪み補正 Homography の推定
40 Calibration Software: OpenCV
41 Calibration Software: Matlab
42 内部パラメータのキャリブレーションまとめ 昔はTsaiのアルゴリズムがよく使われた ソースが公開 不安定 3 次元位置既知の点が必要 最近はEasyCalib がよく使われる 安定 使い勝手がいい 平面上の格子点 平面の位置は未知でいい 格子点は自動検出しやすい 格子点検出も含めてソースが公開されている (OpenCV)
43 出席チェック 複数カメラの幾何学的キャリブレーションについて 透視投影行列 Pを求める場合と基礎行列 Fを求める場合の利点 欠点を述べなさい
Microsoft PowerPoint - CV11.ppt [互換モード]
![Microsoft PowerPoint - CV11.ppt [互換モード]](/thumbs/84/89591648.jpg "Microsoft PowerPoint - CV11.ppt [互換モード]") 視覚の幾何学 3 カメラキャリブレーション 呉海元 @ 和歌山大学 Rigid Bd Mti w views R t 行列 ベクトルの外積 ( 復習 ) Matri rm rss prdut a b a b a ; b a 3 b3 ab3 a3b a3 a ab a3b ab 3 a3 a b a b a b ab a a aとbは一つの平面をサポートしているので a (ab) b (ab) 幾何変換
視覚の幾何学 3 カメラキャリブレーション 呉海元 @ 和歌山大学 Rigid Bd Mti w views R t 行列 ベクトルの外積 ( 復習 ) Matri rm rss prdut a b a b a ; b a 3 b3 ab3 a3b a3 a ab a3b ab 3 a3 a b a b a b ab a a aとbは一つの平面をサポートしているので a (ab) b (ab) 幾何変換
カメラレディ原稿
 IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,[email protected] 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,[email protected] 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
スライド 1
 5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
Microsoft PowerPoint - H17-5時限(パターン認識).ppt
.ppt") パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
vecrot
 1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
航空機の運動方程式
 オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
IPSJ SIG Technical Report Vol.2009-CVIM-168 No /9/ Latest Algorithm for 3-D Reconstruction from Two Views Kento Yamada, 1 Yasu
 2 3 2 3 2 3 Latest Algorithm for 3-D Reconstruction from Two Views Kento Yamada, Yasushi Kanazawa, Kenichi Kanatani 2 and Yasuyuki Sugaya 3 This paper presents a new algorithm for reconstructing the 3-D
2 3 2 3 2 3 Latest Algorithm for 3-D Reconstruction from Two Views Kento Yamada, Yasushi Kanazawa, Kenichi Kanatani 2 and Yasuyuki Sugaya 3 This paper presents a new algorithm for reconstructing the 3-D
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit [email protected] http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit [email protected] http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
代数 幾何 < ベクトル > 1 ベクトルの演算 和 差 実数倍については 文字の計算と同様 2 ベクトルの成分表示 平面ベクトル : a x e y e x, ) ( 1 y1 空間ベクトル : a x e y e z e x, y, ) ( 1 1 z1
 ( 1 y1 空間ベクトル : a x e y e z e x, y, ) ( 1 1 z1") 代数 幾何 < ベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル :, 空間ベクトル : z,, z 成分での計算ができるようにすること ベクトルの内積 : os 平面ベクトル :,, 空間ベクトル :,,,, z z zz 4 ベクトルの大きさ 平面上 : 空間上 : z は 良く用いられる 5 m: に分ける点 : m m 図形への応用
代数 幾何 < ベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル :, 空間ベクトル : z,, z 成分での計算ができるようにすること ベクトルの内積 : os 平面ベクトル :,, 空間ベクトル :,,,, z z zz 4 ベクトルの大きさ 平面上 : 空間上 : z は 良く用いられる 5 m: に分ける点 : m m 図形への応用
(Microsoft PowerPoint - \221\34613\211\361)
") 計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
1214_KiyotaCalib_matsusita_fixed2.pdf
 1 1 3 2 3 Efficient Projector Calibration Method using Plane with Checkerboard Pattern Shota Kiyota, 1 Hiroshi Kawasaki, 1 Ryo Furukawa 3 and Ryusuke Sagawa 2 In recent years, development on 3D measurement
1 1 3 2 3 Efficient Projector Calibration Method using Plane with Checkerboard Pattern Shota Kiyota, 1 Hiroshi Kawasaki, 1 Ryo Furukawa 3 and Ryusuke Sagawa 2 In recent years, development on 3D measurement
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
Microsoft PowerPoint - 10.pptx
 m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
1.民営化
 参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
スライド 1
 知能制御システム学 画像追跡 (1) 特徴点の検出と追跡 東北大学大学院情報科学研究科鏡慎吾 swk(at)ic.is.tohoku.ac.jp 2008.07.07 今日の内容 前回までの基本的な画像処理の例を踏まえて, ビジュアルサーボシステムの構成要素となる画像追跡の代表的手法を概説する 画像上の ある点 の追跡 オプティカルフローの拘束式 追跡しやすい点 (Harris オペレータ ) Lucas-Kanade
知能制御システム学 画像追跡 (1) 特徴点の検出と追跡 東北大学大学院情報科学研究科鏡慎吾 swk(at)ic.is.tohoku.ac.jp 2008.07.07 今日の内容 前回までの基本的な画像処理の例を踏まえて, ビジュアルサーボシステムの構成要素となる画像追跡の代表的手法を概説する 画像上の ある点 の追跡 オプティカルフローの拘束式 追跡しやすい点 (Harris オペレータ ) Lucas-Kanade
Microsoft PowerPoint - H21生物計算化学2.ppt
 演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
SICE東北支部研究集会資料(2015年)
") 計測自動制御学会東北支部第 29 回研究集会 (201.6.26) 資料番号 29-7 ステレオマッチングによる物体形状の取得 Acquisition of an Object Shape Using Stereo Matching 吉田寛和, 釜谷博行 Hirokazu Yoshida, Hiroyuki Kamaya * 八戸工業高等専門学校 *National Institude of Technology,
計測自動制御学会東北支部第 29 回研究集会 (201.6.26) 資料番号 29-7 ステレオマッチングによる物体形状の取得 Acquisition of an Object Shape Using Stereo Matching 吉田寛和, 釜谷博行 Hirokazu Yoshida, Hiroyuki Kamaya * 八戸工業高等専門学校 *National Institude of Technology,
FEM原理講座 (サンプルテキスト)
") サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
Microsoft PowerPoint - e-stat(OLS).pptx
.pptx") 経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
PowerPoint プレゼンテーション
 回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
航空機の運動方程式
 可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
PowerPoint Presentation
 付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
Microsoft PowerPoint - H22制御工学I-2回.ppt
 制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]
![Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]](/thumbs/94/118755799.jpg "Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]") 第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
高次元データ スパース正則化学習法 最適化手法 proximal point algorithm 確率最適化手法 2
 正則化学習法における最適化手法 鈴木大慈東京大学情報理工学系研究科数理情報学専攻 2013/2/18@ 九州大学伊都キャンパス文部科学省委託事業数学協働プログラム 最適化ワークショップ : 拡がっていく最適化 1 高次元データ スパース正則化学習法 最適化手法 proximal point algorithm 確率最適化手法 2 問題設定スパース正則化学習 3 高次元線形判別 物体認識 音声認識 自然言語処理
正則化学習法における最適化手法 鈴木大慈東京大学情報理工学系研究科数理情報学専攻 2013/2/18@ 九州大学伊都キャンパス文部科学省委託事業数学協働プログラム 最適化ワークショップ : 拡がっていく最適化 1 高次元データ スパース正則化学習法 最適化手法 proximal point algorithm 確率最適化手法 2 問題設定スパース正則化学習 3 高次元線形判別 物体認識 音声認識 自然言語処理
コンピュータグラフィックス第6回
 コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2013-CVIM-187 No /5/30 多視点ステレオに基づく最適テクスチャ選択による 3D シーン抽出 西谷昴 越後富夫 本研究は, 移動カメラからマルチビューステレオによって再構成した 3 次元
 多視点ステレオに基づく最適テクスチャ選択による 3D シーン抽出 西谷昴 越後富夫 本研究は, 移動カメラからマルチビューステレオによって再構成した 3 次元面に, 適切なテクスチャマッピングを施すことで, 高質な 3 次元形状を復元することを目的とする. 生成面は複数のカメラから観測されるため, マッピングに用いるテクスチャを選択する必要がある. 視点と異なる角度の画像を選択すると, ステレオの誤差による面の隣接部が目立ち,
多視点ステレオに基づく最適テクスチャ選択による 3D シーン抽出 西谷昴 越後富夫 本研究は, 移動カメラからマルチビューステレオによって再構成した 3 次元面に, 適切なテクスチャマッピングを施すことで, 高質な 3 次元形状を復元することを目的とする. 生成面は複数のカメラから観測されるため, マッピングに用いるテクスチャを選択する必要がある. 視点と異なる角度の画像を選択すると, ステレオの誤差による面の隣接部が目立ち,
PowerPoint Presentation
 応用数学 Ⅱ (7) 7 連立微分方程式の立て方と解法. 高階微分方程式による解法. ベクトル微分方程式による解法 3. 演算子による解法 連立微分方程式 未知数が複数個あり, 未知数の数だけ微分方程式が与えられている場合, これらを連立微分方程式という. d d 解法 () 高階微分方程式化による解法 つの方程式から つの未知数を消去して, 未知数が つの方程式に変換 のみの方程式にするために,
応用数学 Ⅱ (7) 7 連立微分方程式の立て方と解法. 高階微分方程式による解法. ベクトル微分方程式による解法 3. 演算子による解法 連立微分方程式 未知数が複数個あり, 未知数の数だけ微分方程式が与えられている場合, これらを連立微分方程式という. d d 解法 () 高階微分方程式化による解法 つの方程式から つの未知数を消去して, 未知数が つの方程式に変換 のみの方程式にするために,
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
l l l
 l l l l l l l l l l l l l l l l l l l l l l l l l l データ処理の流れ l データ取得 撮像 観測機器でデータを取得 l 輝度較正 生データへの値付け 物 理量に変換 l 幾何補正 画像座標と幾何条件 対 象の地理座標など の対 応付け l 解析 具体的な情報の読み取り はやぶさ搭載カメラ AMICA 別名ONC-T l l l l l l l l
l l l l l l l l l l l l l l l l l l l l l l l l l l データ処理の流れ l データ取得 撮像 観測機器でデータを取得 l 輝度較正 生データへの値付け 物 理量に変換 l 幾何補正 画像座標と幾何条件 対 象の地理座標など の対 応付け l 解析 具体的な情報の読み取り はやぶさ搭載カメラ AMICA 別名ONC-T l l l l l l l l
Microsoft PowerPoint - H22制御工学I-10回.ppt
 制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
Microsoft Word - K-ピタゴラス数.doc
 - ピタゴラス数の代数と幾何学 津山工業高等専門学校 菅原孝慈 ( 情報工学科 年 ) 野山由貴 ( 情報工学科 年 ) 草地弘幸 ( 電子制御工学科 年 ) もくじ * 第 章ピタゴラス数の幾何学 * 第 章ピタゴラス数の代数学 * 第 3 章代数的極小元の幾何学の考察 * 第 章ピタゴラス数の幾何学的研究の動機 交点に注目すると, つの曲線が直交しているようにみえる. これらは本当に直交しているのだろうか.
- ピタゴラス数の代数と幾何学 津山工業高等専門学校 菅原孝慈 ( 情報工学科 年 ) 野山由貴 ( 情報工学科 年 ) 草地弘幸 ( 電子制御工学科 年 ) もくじ * 第 章ピタゴラス数の幾何学 * 第 章ピタゴラス数の代数学 * 第 3 章代数的極小元の幾何学の考察 * 第 章ピタゴラス数の幾何学的研究の動機 交点に注目すると, つの曲線が直交しているようにみえる. これらは本当に直交しているのだろうか.
第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える. 5.1 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f = l 2pL である. ただし, L [ 単位 m] は棒の長さ, [ 2 N / m ] 3 r[ 単位 Kg / m ] E r
![第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える. 5.1 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f = l 2pL である. ただし, L [ 単位 m] は棒の長さ, [ 2 N / m ] 3 r[ 単位 Kg / m ] E r](/thumbs/94/120041361.jpg "第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える. 5.1 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f = l 2pL である. ただし, L [ 単位 m] は棒の長さ, [ 2 N / m ] 3 r[ 単位 Kg / m ] E r") 第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える 5 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f l pl である ただし, L [ 単位 m] は棒の長さ, [ N / m ] [ 単位 Kg / m ] E は (5) E 単位は棒の材料の縦弾性係数 ( ヤング率 ) は棒の材料の単位体積当りの質量である l は境界条件と振動モードによって決まる無
第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える 5 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f l pl である ただし, L [ 単位 m] は棒の長さ, [ N / m ] [ 単位 Kg / m ] E は (5) E 単位は棒の材料の縦弾性係数 ( ヤング率 ) は棒の材料の単位体積当りの質量である l は境界条件と振動モードによって決まる無
数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュ
 数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュレーションによって計算してみる 4.1 放物運動一様な重力場における放物運動を考える 一般に質量の物体に作用する力をとすると運動方程式は
数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュレーションによって計算してみる 4.1 放物運動一様な重力場における放物運動を考える 一般に質量の物体に作用する力をとすると運動方程式は
Microsoft PowerPoint - Robotics_13_review_1short.pptx
 東北文化学園大学 科学技術学部知能情報システム学科 費 仙鳳 ロボットの概要 数学的基礎 座標変換 同次変換 オイラー角 ロールピッチヨウ角 座標系設定 リンクパラメータ 腕型ロボットの構造 腕型ロボットの順運動学 腕型ロボットの逆運動学 腕型ロボットのヤコビアン 速度 特異姿勢 1 2 3 4 1 三角関数 ベクトルと行列 並進変換と回転変換 同次変換行列の導入 オイラー角 (Z-Y-Z) ロール
東北文化学園大学 科学技術学部知能情報システム学科 費 仙鳳 ロボットの概要 数学的基礎 座標変換 同次変換 オイラー角 ロールピッチヨウ角 座標系設定 リンクパラメータ 腕型ロボットの構造 腕型ロボットの順運動学 腕型ロボットの逆運動学 腕型ロボットのヤコビアン 速度 特異姿勢 1 2 3 4 1 三角関数 ベクトルと行列 並進変換と回転変換 同次変換行列の導入 オイラー角 (Z-Y-Z) ロール
多次元レーザー分光で探る凝縮分子系の超高速動力学
 波動方程式と量子力学 谷村吉隆 京都大学理学研究科化学専攻 http:theochem.kuchem.kyoto-u.ac.jp TA: 岩元佑樹 [email protected] ベクトルと行列の作法 A 列ベクトル c = c c 行ベクトル A = [ c c c ] 転置ベクトル T A = [ c c c ] AA 内積 c AA = [ c c c ] c =
波動方程式と量子力学 谷村吉隆 京都大学理学研究科化学専攻 http:theochem.kuchem.kyoto-u.ac.jp TA: 岩元佑樹 [email protected] ベクトルと行列の作法 A 列ベクトル c = c c 行ベクトル A = [ c c c ] 転置ベクトル T A = [ c c c ] AA 内積 c AA = [ c c c ] c =
PowerPoint プレゼンテーション
 20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
PowerPoint プレゼンテーション
 非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
Microsoft PowerPoint - 第3回2.ppt
 講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
システム工学実験 パラメータ推定手順
 システム工学実験パラメータ推定手順 大木健太郎 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 1 アウトライン 1. 線形システムと周波数情報 2. パラメータ推定 3. 実際の手順 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 2 線形時不変システムと伝達関数 入力と出力の関係が線形な定係数微分方程式で与えられるとき, この方程式を線形時不変システムという
システム工学実験パラメータ推定手順 大木健太郎 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 1 アウトライン 1. 線形システムと周波数情報 2. パラメータ推定 3. 実際の手順 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 2 線形時不変システムと伝達関数 入力と出力の関係が線形な定係数微分方程式で与えられるとき, この方程式を線形時不変システムという
Microsoft Word - NumericalComputation.docx
 数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]
![Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]](/thumbs/104/163308363.jpg "Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]") ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
ARToolKit プログラムの仕組み 1: ヘッダファイルのインクルード 2: Main 関数 3: Main Loop 関数 4: マウス入力処理関数 5: キーボード入力処理関数 6: 終了処理関数 3: Main Loop 関数 1カメラ画像の取得 2カメラ画像の描画 3マーカの検出と認識
 ARToolKit プログラムの仕組み 1: ヘッダファイルのインクルード 2: Main 関数 3: Main Loop 関数 4: マウス入力処理関数 5: キーボード入力処理関数 6: 終了処理関数 3: Main Loop 関数 1カメラ画像の取得 2カメラ画像の描画 3マーカの検出と認識 4 次の画像のキャプチャ指示 5マーカの信頼度の比較 6マーカの位置 姿勢の計算 7バッファの内容を画面に表示
ARToolKit プログラムの仕組み 1: ヘッダファイルのインクルード 2: Main 関数 3: Main Loop 関数 4: マウス入力処理関数 5: キーボード入力処理関数 6: 終了処理関数 3: Main Loop 関数 1カメラ画像の取得 2カメラ画像の描画 3マーカの検出と認識 4 次の画像のキャプチャ指示 5マーカの信頼度の比較 6マーカの位置 姿勢の計算 7バッファの内容を画面に表示
, ( ξ/) ξ(x), ( ξ/) x = x 1,. ξ ξ ( ξ, u) = 0. M LS ξ ξ (6) u,, u M LS 3).,.. ξ x ξ = ξ(x),, 1. J = (ξ ξ, V [ξ ] 1 (ξ ξ )) (7) ( ξ, u) = 0, = 1,..., N
![, ( ξ/) ξ(x), ( ξ/) x = x 1,. ξ ξ ( ξ, u) = 0. M LS ξ ξ (6) u,, u M LS 3).,.. ξ x ξ = ξ(x),, 1. J = (ξ ξ, V [ξ ] 1 (ξ ξ )) (7) ( ξ, u) = 0, = 1,..., N](/thumbs/80/81723780.jpg ", ( ξ/) ξ(x), ( ξ/) x = x 1,. ξ ξ ( ξ, u) = 0. M LS ξ ξ (6) u,, u M LS 3).,.. ξ x ξ = ξ(x),, 1. J = (ξ ξ, V [ξ ] 1 (ξ ξ )) (7) ( ξ, u) = 0, = 1,..., N") 1,,.,.. Maximum Likelihood Estimation for Geometric Fitting Yasuyuki Sugaya 1 Geometric fitting, the problem which estimates a geometric model of a scene from extracted image data, is one of the most fundamental
1,,.,.. Maximum Likelihood Estimation for Geometric Fitting Yasuyuki Sugaya 1 Geometric fitting, the problem which estimates a geometric model of a scene from extracted image data, is one of the most fundamental
モデリングとは
 コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
Microsoft PowerPoint - mp11-02.pptx
 数理計画法第 2 回 塩浦昭義情報科学研究科准教授 [email protected] http://www.dais.is.tohoku.ac.jp/~shioura/teaching 前回の復習 数理計画とは? 数理計画 ( 復習 ) 数理計画問題とは? 狭義には : 数理 ( 数学 ) を使って計画を立てるための問題 広義には : 与えられた評価尺度に関して最も良い解を求める問題
数理計画法第 2 回 塩浦昭義情報科学研究科准教授 [email protected] http://www.dais.is.tohoku.ac.jp/~shioura/teaching 前回の復習 数理計画とは? 数理計画 ( 復習 ) 数理計画問題とは? 狭義には : 数理 ( 数学 ) を使って計画を立てるための問題 広義には : 与えられた評価尺度に関して最も良い解を求める問題
09.pptx
 講義内容 数値解析 第 9 回 5 年 6 月 7 日 水 理学部物理学科情報理学コース. 非線形方程式の数値解法. はじめに. 分法. 補間法.4 ニュートン法.4. 多変数問題への応用.4. ニュートン法の収束性. 連立 次方程式の解法. 序論と行列計算の基礎. ガウスの消去法. 重対角行列の場合の解法項目を変更しました.4 LU 分解法.5 特異値分解法.6 共役勾配法.7 反復法.7. ヤコビ法.7.
講義内容 数値解析 第 9 回 5 年 6 月 7 日 水 理学部物理学科情報理学コース. 非線形方程式の数値解法. はじめに. 分法. 補間法.4 ニュートン法.4. 多変数問題への応用.4. ニュートン法の収束性. 連立 次方程式の解法. 序論と行列計算の基礎. ガウスの消去法. 重対角行列の場合の解法項目を変更しました.4 LU 分解法.5 特異値分解法.6 共役勾配法.7 反復法.7. ヤコビ法.7.
図 共面条件 図 地上写真ステレオ計測 図 に示す地上座標系 UVW における点 O 1, O 2, p 1, p 2 を含む空間上の平面方程式を構成し その不定方程 式から次に示す平面の条件が得られる U o1 V o1 W o1 1 U o2 V
 第 4 章ステレオ写真測量 stereo photogrammetry 4.1 ステレオ写真測量とは写真測量による計測は 対象物が平面の場合には単写真で計測することができるが 対象物が立体の場合にはその対象物を 2 か所以上から左右の画像が 60% 以上の重複度で重なるように撮影して行うステレオ写真測量の原理を利用する 計測対象物によっては 2 枚一組以上のステレオ画像を用いて三次元計測を行う 被写体の三次元座標は
第 4 章ステレオ写真測量 stereo photogrammetry 4.1 ステレオ写真測量とは写真測量による計測は 対象物が平面の場合には単写真で計測することができるが 対象物が立体の場合にはその対象物を 2 か所以上から左右の画像が 60% 以上の重複度で重なるように撮影して行うステレオ写真測量の原理を利用する 計測対象物によっては 2 枚一組以上のステレオ画像を用いて三次元計測を行う 被写体の三次元座標は
計算機シミュレーション
 . 運動方程式の数値解法.. ニュートン方程式の近似速度は, 位置座標 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます. 本来は が の極限をとらなければいけませんが, 有限の小さな値とすると 秒後の位置座標は速度を用いて, と近似できます. 同様にして, 加速度は, 速度 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます.
. 運動方程式の数値解法.. ニュートン方程式の近似速度は, 位置座標 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます. 本来は が の極限をとらなければいけませんが, 有限の小さな値とすると 秒後の位置座標は速度を用いて, と近似できます. 同様にして, 加速度は, 速度 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます.
最小二乗法とロバスト推定
 はじめに 最小二乗法とロバスト推定 (M 推定 ) Maplesoft / サイバネットシステム ( 株 ) 最小二乗法は データフィッティングをはじめとしてデータ解析ではもっともよく用いられる手法のひとつです Maple では CurveFitting パッケージの LeastSquares コマンドや Statistics パッケージの Fit コマンド NonlinearFit コマンドなどを用いてデータに適合する数式モデルを求めることが可能です
はじめに 最小二乗法とロバスト推定 (M 推定 ) Maplesoft / サイバネットシステム ( 株 ) 最小二乗法は データフィッティングをはじめとしてデータ解析ではもっともよく用いられる手法のひとつです Maple では CurveFitting パッケージの LeastSquares コマンドや Statistics パッケージの Fit コマンド NonlinearFit コマンドなどを用いてデータに適合する数式モデルを求めることが可能です
Microsoft Word - 非線形計画法 原稿
 非線形計画法条件付き最適化問題は目的関数と制約条件で示すが この中に一つでも 次式でないものが含まれる問題を総称して非線形計画法いう 非線形計画問題は 多くの分野で研究されているが 複雑性により十分汎用的なものは確立されておらず 限定的なものに限り幾つかの提案がなされている ここでは簡単な解法について紹介する. 制約なし極値問題 単純問題の解法 変数で表される関数 の極値は を解くことによって求められる
非線形計画法条件付き最適化問題は目的関数と制約条件で示すが この中に一つでも 次式でないものが含まれる問題を総称して非線形計画法いう 非線形計画問題は 多くの分野で研究されているが 複雑性により十分汎用的なものは確立されておらず 限定的なものに限り幾つかの提案がなされている ここでは簡単な解法について紹介する. 制約なし極値問題 単純問題の解法 変数で表される関数 の極値は を解くことによって求められる
以下 変数の上のドットは時間に関する微分を表わしている (ex. 2 dx d x x, x 2 dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ
 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ") 以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典
 南慶典") 多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
SAP11_03
 第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
講義「○○○○」
 講義 信頼度の推定と立証 内容. 点推定と区間推定. 指数分布の点推定 区間推定 3. 指数分布 正規分布の信頼度推定 担当 : 倉敷哲生 ( ビジネスエンジニアリング専攻 ) 統計的推測 標本から得られる情報を基に 母集団に関する結論の導出が目的 測定値 x x x 3 : x 母集団 (populaio) 母集団の特性値 統計的推測 標本 (sample) 標本の特性値 分布のパラメータ ( 母数
講義 信頼度の推定と立証 内容. 点推定と区間推定. 指数分布の点推定 区間推定 3. 指数分布 正規分布の信頼度推定 担当 : 倉敷哲生 ( ビジネスエンジニアリング専攻 ) 統計的推測 標本から得られる情報を基に 母集団に関する結論の導出が目的 測定値 x x x 3 : x 母集団 (populaio) 母集団の特性値 統計的推測 標本 (sample) 標本の特性値 分布のパラメータ ( 母数
連続講座 断層映像法の基礎第 34 回 : 篠原 広行 他 放射状に 線を照射し 対面に検出器の列を置いておき 一度に 1 つの角度データを取得する 後は全体を 1 回転しながら次々と角度データを取得することで計測を終了する この計測で得られる投影はとなる ここで l はファンビームのファンに沿った
 連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
受信機時計誤差項の が残ったままであるが これをも消去するのが 重位相差である. 重位相差ある時刻に 衛星 から送られてくる搬送波位相データを 台の受信機 でそれぞれ測定する このとき各受信機で測定された衛星 からの搬送波位相データを Φ Φ とし 同様に衛星 からの搬送波位相データを Φ Φ とす
 RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
E = N M α= = [( pα I α x ) 2 ( α qα + y ) 2 ] α r α r α I α α p α = P X α + P 2 Y α + P 3 Z α + P 4, q α = P 2 X α + P 22 Y α + P 23 Z α + P 24 r α =
![E = N M α= = [( pα I α x ) 2 ( α qα + y ) 2 ] α r α r α I α α p α = P X α + P 2 Y α + P 3 Z α + P 4, q α = P 2 X α + P 22 Y α + P 23 Z α + P 24 r α =](/thumbs/91/105166806.jpg "E = N M α= = [( pα I α x ) 2 ( α qα + y ) 2 ] α r α r α I α α p α = P X α + P 2 Y α + P 3 Z α + P 4, q α = P 2 X α + P 22 Y α + P 23 Z α + P 24 r α =") 3 2 3 2 3 undle Adjustment or 3-D Reconstruction: Implementation and Evaluation Yuuki Iwamoto, Yasuyuki Sugaya 2 and Kenichi Kanatani We describe in detail the algorithm o bundle adjustment or 3-D reconstruction
3 2 3 2 3 undle Adjustment or 3-D Reconstruction: Implementation and Evaluation Yuuki Iwamoto, Yasuyuki Sugaya 2 and Kenichi Kanatani We describe in detail the algorithm o bundle adjustment or 3-D reconstruction
スライド 1
 データ解析特論第 10 回 ( 全 15 回 ) 2012 年 12 月 11 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 終了 11/13 11/20 重回帰分析をしばらくやります 12/4 12/11 12/18 2 前回から回帰分析について学習しています 3 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える
データ解析特論第 10 回 ( 全 15 回 ) 2012 年 12 月 11 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 終了 11/13 11/20 重回帰分析をしばらくやります 12/4 12/11 12/18 2 前回から回帰分析について学習しています 3 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える
カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
PowerPoint プレゼンテーション
 空間フィルタリング (spatal lterng) 入力画像の対応する画素値だけではなく その周囲 ( 近傍領域 ) の画素も含めた領域内の画素値を用いて 出力画像の対応する画素値を計算する処理 入力画像出力画像入力画像出力画像 画素ごとの濃淡変換 ( 階調処理 ) 領域に基づく濃淡変換 ( 空間フィルタリング ) 空間フィルタ (spatal lter) 線形フィルタ (lnear lter) w
空間フィルタリング (spatal lterng) 入力画像の対応する画素値だけではなく その周囲 ( 近傍領域 ) の画素も含めた領域内の画素値を用いて 出力画像の対応する画素値を計算する処理 入力画像出力画像入力画像出力画像 画素ごとの濃淡変換 ( 階調処理 ) 領域に基づく濃淡変換 ( 空間フィルタリング ) 空間フィルタ (spatal lter) 線形フィルタ (lnear lter) w
PowerPoint プレゼンテーション
 データ解析 第 7 回 : 時系列分析 渡辺澄夫 過去から未来を予測する 観測データ 回帰 判別分析 解析方法 主成分 因子 クラスタ分析 時系列予測 時系列を予測する 無限個の確率変数 ( 確率変数が作る無限数列 ){X(t) ; t は整数 } を生成する情報源を考える {X(t)} を確率過程という 確率過程に ついて過去の値から未来を予測するにはどうしたらよいだろうか X(t-K),X(t-K+1),,X(t-1)
データ解析 第 7 回 : 時系列分析 渡辺澄夫 過去から未来を予測する 観測データ 回帰 判別分析 解析方法 主成分 因子 クラスタ分析 時系列予測 時系列を予測する 無限個の確率変数 ( 確率変数が作る無限数列 ){X(t) ; t は整数 } を生成する情報源を考える {X(t)} を確率過程という 確率過程に ついて過去の値から未来を予測するにはどうしたらよいだろうか X(t-K),X(t-K+1),,X(t-1)
NumericalProg09
 数値解析および プログラミング演習 [08 第 9 回目 ] の解法 - 4. Ruge-Kua( ルンゲ クッタ 法 Ruge-Kua-Gill( ルンゲ クッタ ジル / ギル 法 5. 多段解法 解法の対象 常微分方程式 d( d 初期値条件 (, の変化に応じて変化する の値を求める. ( 0 ( 0 と 0 は,give 0 常微分方程式の初期値問題 と言う. 3 Ruge-Kua 法の導出
数値解析および プログラミング演習 [08 第 9 回目 ] の解法 - 4. Ruge-Kua( ルンゲ クッタ 法 Ruge-Kua-Gill( ルンゲ クッタ ジル / ギル 法 5. 多段解法 解法の対象 常微分方程式 d( d 初期値条件 (, の変化に応じて変化する の値を求める. ( 0 ( 0 と 0 は,give 0 常微分方程式の初期値問題 と言う. 3 Ruge-Kua 法の導出
数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数
 . 三角関数 基本関係 t cot c sc c cot sc t 還元公式 t t t t t t cot t cot t 数学 数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数 数学. 三角関数 5 積和公式 6 和積公式 数学. 三角関数 7 合成 t V v t V v t V V V V VV V V V t V v v 8 べき乗 5 6 6
. 三角関数 基本関係 t cot c sc c cot sc t 還元公式 t t t t t t cot t cot t 数学 数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数 数学. 三角関数 5 積和公式 6 和積公式 数学. 三角関数 7 合成 t V v t V v t V V V V VV V V V t V v v 8 べき乗 5 6 6
tottori2013-print.key
 1 / 152 3 / 152 2 / 152 4 / 152 5 / 152 7 / 152 6 / 152 8 / 152 9 / 152 11 / 152 Red: [R,G,B] = [255,0,0] Yellow [R,G,B] = [255, 255, 0] Magenta [R,G,B] = [255, 0, 255] W [R,G,B] = [ Green: [R,G,B] = [0,
1 / 152 3 / 152 2 / 152 4 / 152 5 / 152 7 / 152 6 / 152 8 / 152 9 / 152 11 / 152 Red: [R,G,B] = [255,0,0] Yellow [R,G,B] = [255, 255, 0] Magenta [R,G,B] = [255, 0, 255] W [R,G,B] = [ Green: [R,G,B] = [0,
1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +
![1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +](/thumbs/81/83701592.jpg "1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +") 3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
슬라이드 1
 SoilWorks for FLIP 主な機能特徴 1 / 13 SoilWorks for FLIP Pre-Processing 1. CADのような形状作成 修正機能 AutoCAD感覚の使いやすいモデリングや修正機能 1 CADで形状をレイヤー整理したりDXFに変換しなくても Ctrl+C でコピーしてSoilWorks上で Ctrl+V で読込む 2. AutoCAD同様のコマンドキー入力による形状作成
SoilWorks for FLIP 主な機能特徴 1 / 13 SoilWorks for FLIP Pre-Processing 1. CADのような形状作成 修正機能 AutoCAD感覚の使いやすいモデリングや修正機能 1 CADで形状をレイヤー整理したりDXFに変換しなくても Ctrl+C でコピーしてSoilWorks上で Ctrl+V で読込む 2. AutoCAD同様のコマンドキー入力による形状作成